

Відповіді на запитання з лекцій (ЕТЕСТ 1901-ст Індивідуальний графік Дудченко Артем)
.docxТест на 1 моду в комплексі
Лекція №4
Тема: Розрахункове й дослідне визначення втрат, ККД і коефіцієнту потужності асинхронних двигунів.
Питання: Що таке ККД?
Відповідь:
Коефіцієнт корисної дії — відношення виконаної роботи до загальних енергетичних затрат на її виконання. Безрозмірна величина, яка вимірюється у відсотках. Є важливою характеристикою машин та двигунів.
Формула для визначення ККД електричного двигуна:
 або,
або,

![]() –
потужність,
яка підводиться до електричної мережі;
–
потужність,
яка підводиться до електричної мережі;
![]() –
корисна
потужність (operating
power; useful power)
електричної машини;
–
корисна
потужність (operating
power; useful power)
електричної машини;
![]() –
сумарні
втрати в електричній машині, які
дорівнюють
–
сумарні
втрати в електричній машині, які
дорівнюють ![]() .
.
Під час визначення ККД не повинна мати вібрацій, недопустимих шумів; її підшипники, підп’ятники, колектор (або контактні кільця) і щітки повинні бути припрацьовані, а температура всіх частин машини дорівнювати робочій.
ККД
машини чи трансформатора
представляє собою відношення корисної
(віддаваної) Р2 до
підведеної![]() його
можна виразити у відносних одиницях
його
можна виразити у відносних одиницях![]() або
у відсотках
або
у відсотках![]() .
.
Сучасні
електричні машини і трансформатор мають
дуже високий ККД. У машин потужністю 50
кВт він складає 85-90%, потужністю 200 кВт
- ![]() ,
потужністю 400-700 кВт -
,
потужністю 400-700 кВт -![]() .
Потужні трансформатори мають ще вищий
ККД, що досягає 99+99,5%.
.
Потужні трансформатори мають ще вищий
ККД, що досягає 99+99,5%.
Таким
чином, різниця між значеннями ![]() і
порівняно
невелика, що накладає певні труднощі
при дослідному чи аналітичному визначенні
ККД. Тому дня різноманітних умов зручніше
визначити ККД за видозміненими формулами,
маючи на увазі, що
і
порівняно
невелика, що накладає певні труднощі
при дослідному чи аналітичному визначенні
ККД. Тому дня різноманітних умов зручніше
визначити ККД за видозміненими формулами,
маючи на увазі, що![]() .
.
Для
двигуна, у якого легко виміряти підведену
електричну потужність ![]() , ККД
, ККД
![]()
Для
генератора, що віддає потужність ![]() , вираз
можна представити у вигляді
, вираз
можна представити у вигляді
![]() (13.9)
(13.9)
при
цьому отримується більш правильний
результат, бо значення втрат ![]() складає
лише незначну частину корисної
потужностіР2.
складає
лише незначну частину корисної
потужностіР2.
Проаналізуємо зміни ККД в залежності від навантаження, взявши для приклад генератор постійного струму, хоча аналогічний результат може бути отриманий для будь-якої машини або трансформатора.
Корисна
потужність генератора, що має номінальну
потужність ![]() , при
довільно вибраному струміІ складає
, при
довільно вибраному струміІ складає
![]()
![]()
Питання: Втрати потужності електричного двигуна.
Відповідь:
Електрична потужність, яку споживає двигун з електромережі, не вся перетворюється на корисну механічну потужність, що віддасться з його вала, частина її втрачається в самому двигуні.
Втрати потужності в електродвигунах поділяють:
- на постійні , що майже не залежать від струму навантаження, - змінні ΔРзм які залежать від струму навантаження, тобто:
![]()
Постійними втратами вважають втрати в сталі (на перемагнічування і вихрові струми) та механічні (натертя і вентиляцію). У двигунах постійного струму незалежного і паралельного збуджень до постійних втрат відносять також втрати в обмотках збудження. Змінні втрати у двигуні постійного струму виникають внаслідок проходження електричного струму в колі якоря, а в асинхронному двигуні – в колах статора і ротора. Вони пропорціональні квадрату струму та опору відповідного кола і визначаються за формулами:
для двигуна постійного струму
![]()
для трифазних асинхронних двигунів
![]()
При номінальному навантаженні відповідно матимемо
![]()
![]()
Змінні втрати при будь-якому навантаженні можна визначити за формулами:
для двигуна постійного струму
для трифазних асинхронних двигунів
У рівняннях кратності струмів
навантаження ![]() та
та ![]() позначимо
буквою Кз (коефіцієнт
завантаження), тоді для визначення
змінних втрат потужності в різних
двигунах одержимо один вираз:
позначимо
буквою Кз (коефіцієнт
завантаження), тоді для визначення
змінних втрат потужності в різних
двигунах одержимо один вираз:
![]()
Повні втрати потужності у двигуні:
АР = АРтс + АРшм,„КЇ = АР:шм(а + К*),
Питання: Які є способи визначення ккд електричного двигуна?
1) спосіб вимірювання потужності;
2)спосіб гальмування;
3)спосіб навантаження;
4)непрямий метод;
Cпосіб гальмування, під час якого обертовий момент, що розвивається двигуном, та відповідну йому потужність, яка віддається, визначають за допомогою пристрою гальмування, а електричну потужність, яка підводиться, – за допомогою електровимірювальних приладів.
Cпосіб вимірювання потужності визначається за допомогою електровимірювальних приладів.
Cпосіб навантаження (спосіб тарованої машини), під час якого електрична потужність, що споживається двигуном (видається генератором), визначається за допомогою електровимірювальних приладів, а механічна потужність двигуна, яка віддається (потужність генератора, що споживається), вимірюється за допомогою тарованої машини, потужність якої повинна бути сумірна з потужністю випробуваної машини.
Непрямий метод визначення ККД із використанням формули (2.11) застосовується для машин з ККД більшим 85%. Він базується на вимірюванні таких втрат потужності в електричній машині:
![]() –
втрати
потужності в сталі;
–
втрати
потужності в сталі;
![]() –
механічні
втрати;
–
механічні
втрати;
![]() –
основні
втрати потужності в колах робочих
обмоток машини;
–
основні
втрати потужності в колах робочих
обмоток машини;
![]() –
втрати
потужності в перехідних контактах
щіток, на збудження та додаткові (втрати,
які не враховано в інших випадках).
–
втрати
потужності в перехідних контактах
щіток, на збудження та додаткові (втрати,
які не враховано в інших випадках).
Лекція №5
Тема: Режими роботи асинхронних машин.
Питання: Які є режими роботи асинхронних машин?
Відповідь:
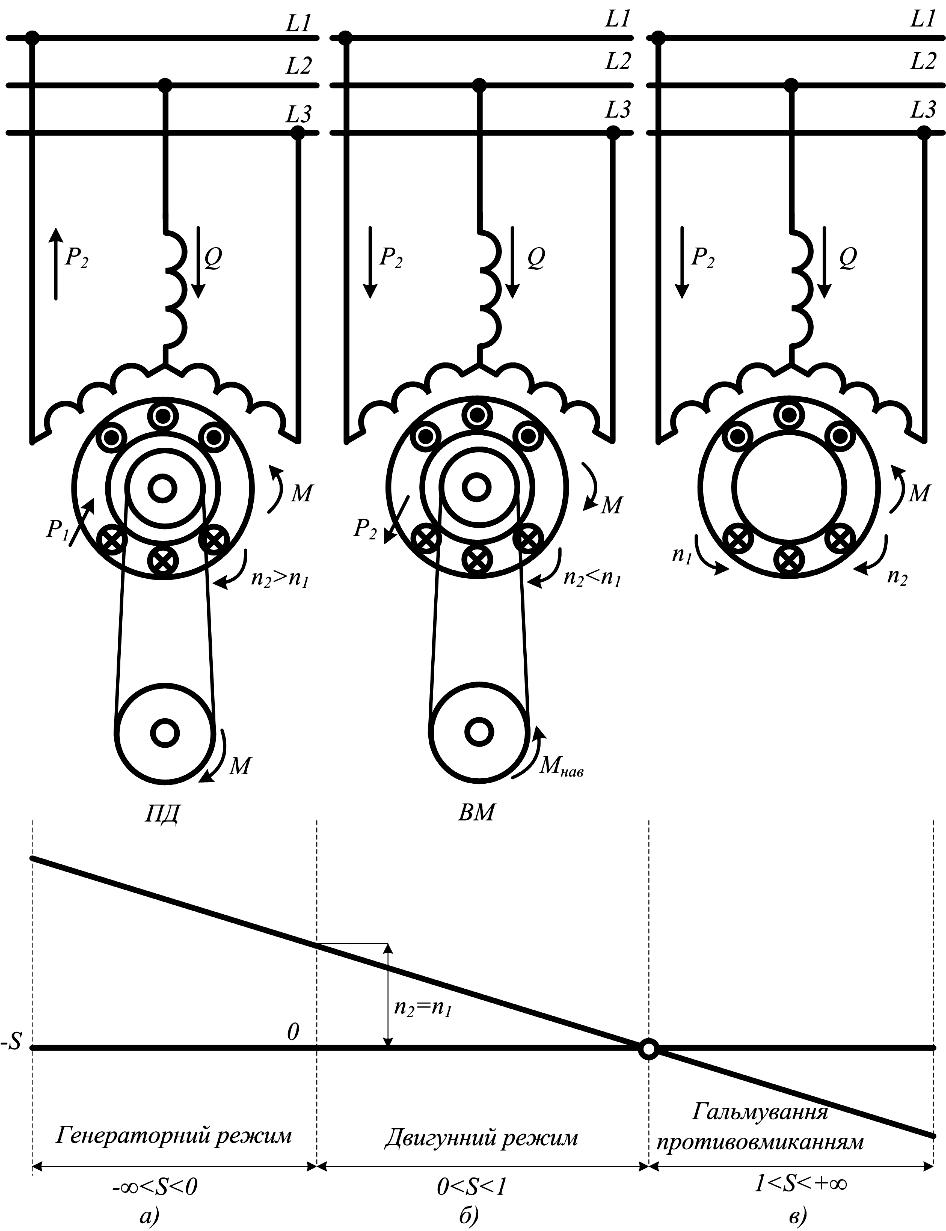
Режим роботи трифазної асинхронної машини визначається режимом електро–магнітної взаємодії струмів в обмотках статора і ротора. В залежності від значення ковзання трифазна асинхронна машина може працювати в одному з трьох режимів:
В режимі двигуна.
В режимі генератора.
В режимі електромагнітного гальма.
Режим електромагнітного гальма застосовується для гальмування і зупинки АД і наведених ним у рух механізмів.
Це здійснюється шляхом зміни напрямку обертання поля за рахунок переключення двох будь-яких живлять проводів (фаз) обмотки статора. Механічна потужність розвивається за рахунок обертання по інерції мас ротора і приєднаного до нього механізму при зменшенні частоти обертання. при n = 0 машина відключається від мережі. При здійсненні реверсу відключення не відбувається.
У режимі електромагнітного гальмування частота обертання ротора є негативною, а тому ковзання набуває додатні значення більше одиниці:
Режим генератора. Приклавши до валу ротора зовнішній обертальний момент, ротор можна, привести в обертання-в напрямі обертання поля статора з частотою, вищою від синхронної У цьому випадку ротор буде переганяти поле статора, а напрям ЕРС і активної складової струму ротора у порівнянні з режимом двигуна зміниться на зворотне. Значить, зміниться на зворотній і напрям електромагнітного моменту, котрий стане тепер гальмівним, а машина почне працювати в режимі генератора, віддаючи енергію в мережу.
Частота обертання ротора, при цьому теоретично може як завгодно великою.
Отже, асинхронна машина, працюючи як генератор, характеризується такими діапазонами частот обертання і ковзання:
![]()
Не дивлячись на виключну простоту і дешевизну асинхронних машин, а також дуже просте переведення їх в режим генератора, асинхронні генератори застосовуються рідко.
Справа в тому, що як і трансформатор, асинхронна машина, споживає з мережі індуктивний струм намагнічування, а оскільки цей струм через наявність повітряного проміжку, що чинить магнітному потокові значний опір, дуже великий: він може досягати 30-40 % номінального струму машини. Значить, на три асинхронних генератора потрібний один синхронний, що дорівнює їх за потужністю, який забезпечував би перші струмом намагнічування. Можливо і самозбудження асинхронних генераторів, коли до затискачів статора під'єднуєтьея батарея конденсаторів. Але вони дорогі і мають великі розміри. Останнім часом, у зв'язку з появою малогабаритних конденсаторів, асинхронні машини використовують на маленьких електростанціях, які використовують енергію вітру.
Режим
двигуна.
Цей режим є основним. В момент запуску,
коли п=0, згідно
(11.2),![]() . Якщо
б після запуску ротор досяг синхронної
частоти обертання
. Якщо
б після запуску ротор досяг синхронної
частоти обертання![]() , то
ковзання дорівнювало б нулю. Таким чином
діапазони частот обертання і ковзання
асинхронного двигуна такі:
, то
ковзання дорівнювало б нулю. Таким чином
діапазони частот обертання і ковзання
асинхронного двигуна такі:
![]()
Питання: Які є номінальні режми роботи електродвигуна?(Також це питання які є в контрольній роботі і тут відповіді на ці запитання)
Відповідь:
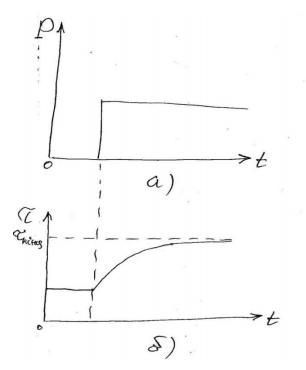
Тривалий режим, S1. Це режим роботи при незмінному навантаженні двигуна, або навантаженні, що циклічно змінюється. При цьому перегрів досягає усталеного значення. Залежності потужності двигуна Р(t) i τ(t) показано на рис а, б.
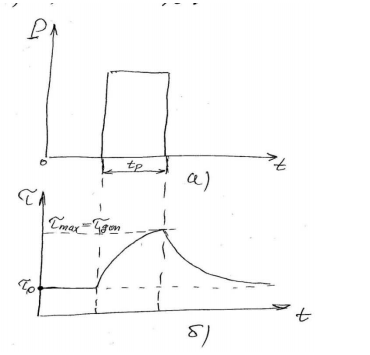
Короткочасний режим, S2. Це режим роботи, при якому за час роботи tр з номінальним навантаженням двигун не встигає нагріватися до усталеної температури, а за час паузи охолоджується до значення τ=0. Відповідні залежності Р(t) i τ(t) показано на рис а, б. Тут стандартні значення tp дорівнюють 10, 30, 60, 90 хв
Повторно-короткочасний режим, S3. Це режим ПВ (повторного вмикання) у якому послідовно змінюються часу роботи tp і паузи t0 за який перегріви τmax та τmin не досягають усталених значень. Таке формування характерно і для інших режимів ПВ. Відповідно залежності Р(t) i τ(t) показано на рисунку а, б. Режим ПВ характеризується тривалістю вмикання у відсотках:
− де tц=tp+t0 – тривалість робочого циклу, яка повинна бути не більше 10 хв. Стандартні значення ПВ=15, 25, 40, 50 и 60 %.

Повторно-короткочасний режим із частими пусками, S4. Цей режим аналогічний попередньому, але пускові витрати тут впливають на значення τ. Значення ПВ ті ж самі, що і в режимі S3, але, враховують час пуску tп, тобто
. Нормується також кількість пусків за годину (30, 60, 120, та 240) і коефіцієнт інерції

де JЕП – сумарний зведений момент інерції усього ЕП, а Jрот – момент інерції ротора двигуна.
Режим ПВ, із частими пусками і електричним гальмуванням, S5. У цьому режимі враховують також час гальмування tг, тоді
, яке нормується як и в S4. Та сама й кількість пусків за годину. А коефіцієнти інерції такі FI=1.2;1.6;2;2.5;4. На значення τ суттєво впливають пускогальмівні режими.
Режим перемежування. S6. Цей режим подібний до режиму ПВ, але під час паузи двигун не вимикається з мережі, працюючи в режимі холостого ходу. Тобто tц=tp+txx. Відносна тривалість навантаження

, а час циклу не повинен перевищувати 10 хв. Значення ПН – такі ж як і ПВ в режимі S3.
Режим перемежування з частим реверсуванням S7. У цьому режимі періоди реверсу змінюються періодами сталого навантаження, перегрів не досягає усталеного значення. Нормується кількість реверсувань за годину (30, 60, 120, 240) і FI як в режимі S5.
Режим перемежування з двома або більше кутовими швидкостями S8. Тут періоди з одним навантаженням при одній кутовій швидкості чергуються з періодами при другій кутовій швидкості та відповідному цій швидкості навантаженню. Якщо tр1, tр2, tр3 – тривалість роботи на кожній кутовій швидкості, а tг1, tг2 – час електричного гальмування, то відносна тривалість навантаження:
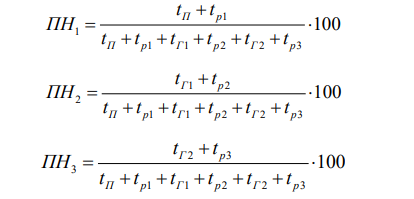
Для цього режиму нормується кількість циклів за годину – як у S7, коефіцієнт FI – як в S5.