Задача 1
|
Вариант задачи |
Номинальная мощность PH ,кВт |
Номинальная частота вращения nн , об/мин |
Номинальное напряжение якоря Uн , В |
Номинальный ток якоря Iн , А |
Сопротивление якоря Rя , Ом |
|
5 |
25 |
1500 |
220 |
130 |
0,11 |
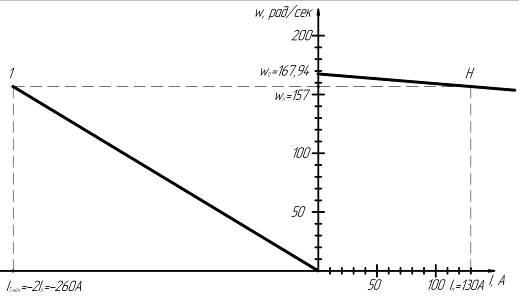
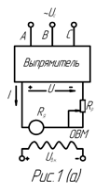
а).Электромеханической характеристикой двигателя постоянного тока называется зависимость угловой скорости вала двигателя (или частоты вращения n) от тока якоря I. Ввиду того что ток якоря в случае постоянства тока возбуждения жестко связан с вращающим моментом, электромеханическая характеристика имеет такой же вид, как механическая характеристика =f(M). Уравнение семейства электромеханических характеристик для схемы, имеет вид:
![]() (1)
(1)
Здесь
![]() - скорость идеального холостого хода;
(2)
- скорость идеального холостого хода;
(2)
![]() - перепад скорости; (3)
- перепад скорости; (3)
C — коэффициент двигателя, зависящий от его параметров; Rя — сопротивление якоря; Rр — сопротивление реостата в цепи якоря.
Коэффициент C может быть определен по паспортным данным двигателя:
![]() (4)
(4)
Пересчитаем
номинальную частоту вращения nн
(об/мин) в номинальную скорость ![]() (рад/с):
(рад/с):
![]() (5)
(5)
б). Ток статической нагрузки IC в точке m можно определить из пропорции:
![]() (6)
(6)
где Iн — номинальный ток якоря; Mс — момент сопротивления машины, приведенный к валу двигателя (Н∙м); Mн — номинальный вращающий момент двигателя (Н∙м).
![]()
где Pн — в Ваттах.
Сопротивление реостата, необходимое для получения заданной скорости при известной нагрузке, можно вычислить по формуле (7), полученной из уравнения (1):
![]() (7)
(7)
Для того чтобы найти Rр1 , нужно подставить координаты точки к: = 0, I = 2Iн, а для определения Rp2 координаты точки m: =c, I = Ic.
к: = 0, I = 2Iн
![]()
m: = c, I = Ic
![]()
c
= 0.4∙![]() =0,4ּ157=62,8
рад/с
=0,4ּ157=62,8
рад/с
![]()
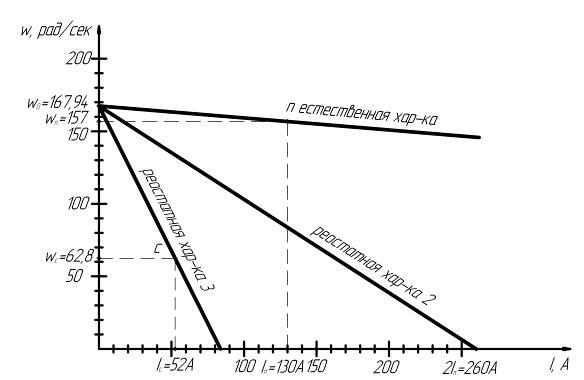
1 - естественная характеристика ЭМХ,
2,3 - реостатные характеристики ЭМХ
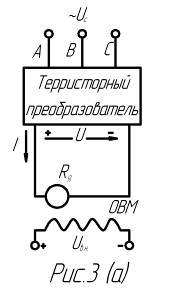
в). Уравнение семейства электромеханических характеристик для схемы, представленной на рис. 3, имеет вид
![]() (8)
(8)
Скорость идеального холостого хода зависит от напряжения U, подводимого к якорю двигателя:
![]() (9)
(9)
Три искусственные характеристики:
1)U=0.8ּ220=176
В
![]()
2)
U=0.5ּ220=110
В
![]()
3)U=0.2ּ220=44
В
![]()
Перепад скорости н при изменении нагрузки от нуля до номинальной будет для всех характеристик одинаков:
![]() (10)
(10)
Поэтому электромеханические характеристики параллельны друг другу
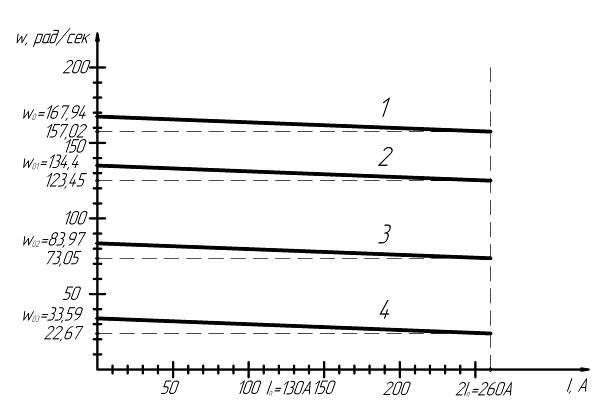 1
- естественную характеристику ЭМХ;
1
- естественную характеристику ЭМХ;
2, 3,4 - искусственные характеристики ЭМХ
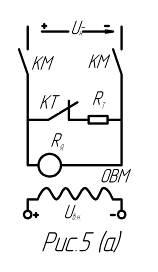
г). Для перевода двигателя в режим динамического торможения его якорь нужно отключить контактором КМ от источника постоянного тока и замкнуть контактором КТ на резистор Rт (рис.5). Тогда электрическая машина превратится в генератор, т.е. станет тормозом. Ток в цепи якоря изменит свое направление, а его значение в первый момент после переключения будет определяться значением ЭДС Eнач. и общим сопротивлением цепи (Rя + Rт):
![]() (11)
(11)
Отсюда можно найти Rт , если задан начальный ток:
![]() (12)
(12)
Если нач = н, то Енач = Ен = Uн – IнRя .
Енач = Ен = Uн – IнRя = 220-130ּ0,11=205,7 В
![]()
![]()
Электромеханическая характеристика при динамическом торможении: