

Произведем корректировку данной системы автоматического регулирования.
2.1. По номограммам качества Солодовникова
для определения частоты среза системы
по перерегулированию
![]() и времени регулирования
и времени регулирования
![]() найдем
желаемую частоту среза.
найдем
желаемую частоту среза.

Введем полученный коэффициент коррекции в систему и проверим алгебраическими и частотными критериями устойчивости насколько правильно подобрано корректирующее звено.
2.2. Алгебраический критерий устойчивости. Критерий определителей Гурвица.
Исходные значения коэффициентов передачи
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
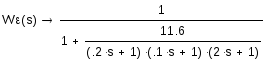
Передаточная функция разомкнутой системы управления
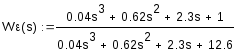
Передаточная функция замкнутой системы управления
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Передаточные функции элементов системы:
![]()
![]()
![]()
![]()
2.3. Частотный критерий устойчивости Михайлова.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Система устойчива, т.к. годограф
Михайлова САУ, представленной передаточной
функцией
![]() начинается при частоте
начинается при частоте
![]() на вещественной положительной полуоси,
не нарушает последовательности обхода
квадрантов координатной плоскости
против часовой стрелки, нигде не обращаясь
в ноль и не пересекается сам с собой.
на вещественной положительной полуоси,
не нарушает последовательности обхода
квадрантов координатной плоскости
против часовой стрелки, нигде не обращаясь
в ноль и не пересекается сам с собой.
2.4. Частотный критерий устойчивости Найквиста.
![]()
По частному случаю частотного критерия
Гурвица для системы
![]() третьего порядка:
третьего порядка:
![]() ,
,
![]() ,
делаем вывод, что разомкнутая система
устойчива.
,
делаем вывод, что разомкнутая система
устойчива.
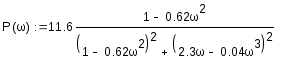
Из комплексного коэффициента передачи
![]()
![]()
выделим мнимую и вещественную частотные характеристики
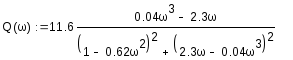
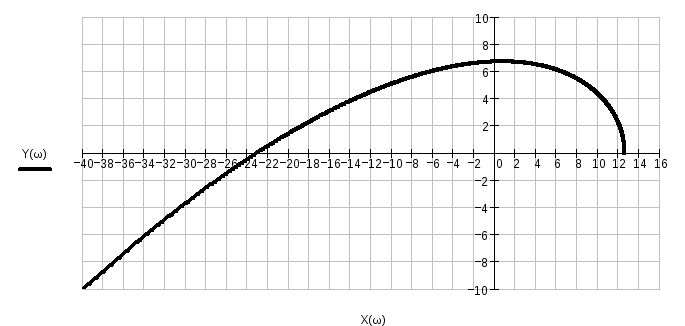
Замкнутая система является устойчивой,
т.к. годограф Найквиста для разомкнутой
системы, представленной передаточной
функцией
![]() являющейся устойчивой, не охватывает
точку (-1;j0).
являющейся устойчивой, не охватывает
точку (-1;j0).
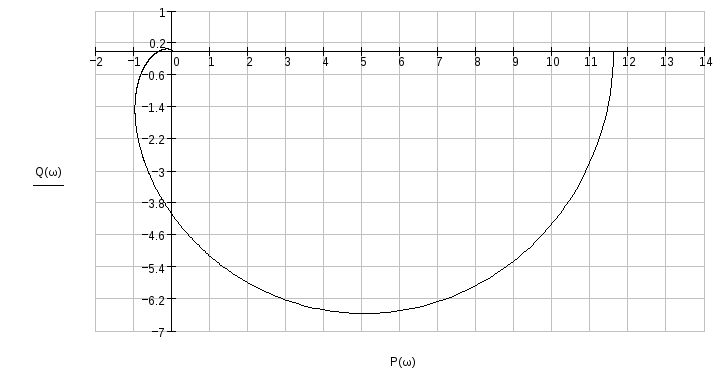
2.5. Логарифмические частотные характеристики. Проверка запасов устойчивости системы.
Передаточная функция разомкнутой
системы
![]()
1
)
![]()
- апериодическое звено
с наклоном
2
)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3 )
- апериодическое звено с наклоном
![]()
![]()
![]()
![]()
4 )
![]()
- апериодическое звено с наклоном
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
ЛАЧХ нескорректированной системы:
ФЧХ скорректированной системы:
![]()
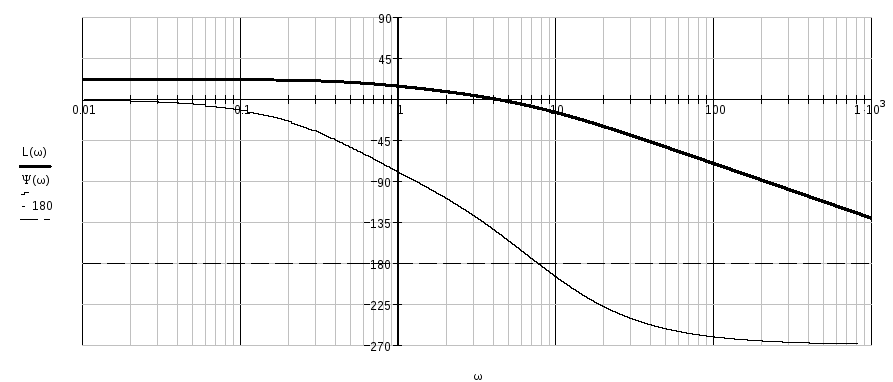
2.6. Построим переходную характеристику скорректированной системы автоматического регулирования при помощи обратного преобразования Лапласа.
![]()
![]()
![]() =
=![]() +
+
+![]() +
+
+![]()
![]()
![]()
![]()
![]()
2.7. Построим весовую функцию скорректированной системы автоматического регулирования.
![]()
![]() =
=![]() +
+
+![]() +
+
+![]()

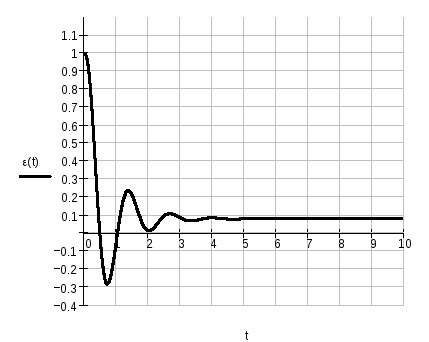
2.8. Построим график ошибки скорректированной системы автоматического регулирования.
![]()
![]() =
=
![]() +
+
+
![]() +
+
+
![]()
-
Рассмотрим примеры систем автоматического регулирования, которые могут функционировать с учетом приведенный параметров. Существует несколько видов систем регулирования уровня жидкости в емкости. Рассмотрим некоторые из них:
-
Поплавковый регулятор
Простым примеров этой системы может быть сливной бачок унитаза.
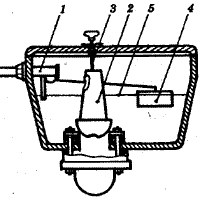
1 - поплавковый клапан; 2 - груша, совмещенная с переливом; 3 - тяга; 4 - поплавок; 5 - уровень воды.
-
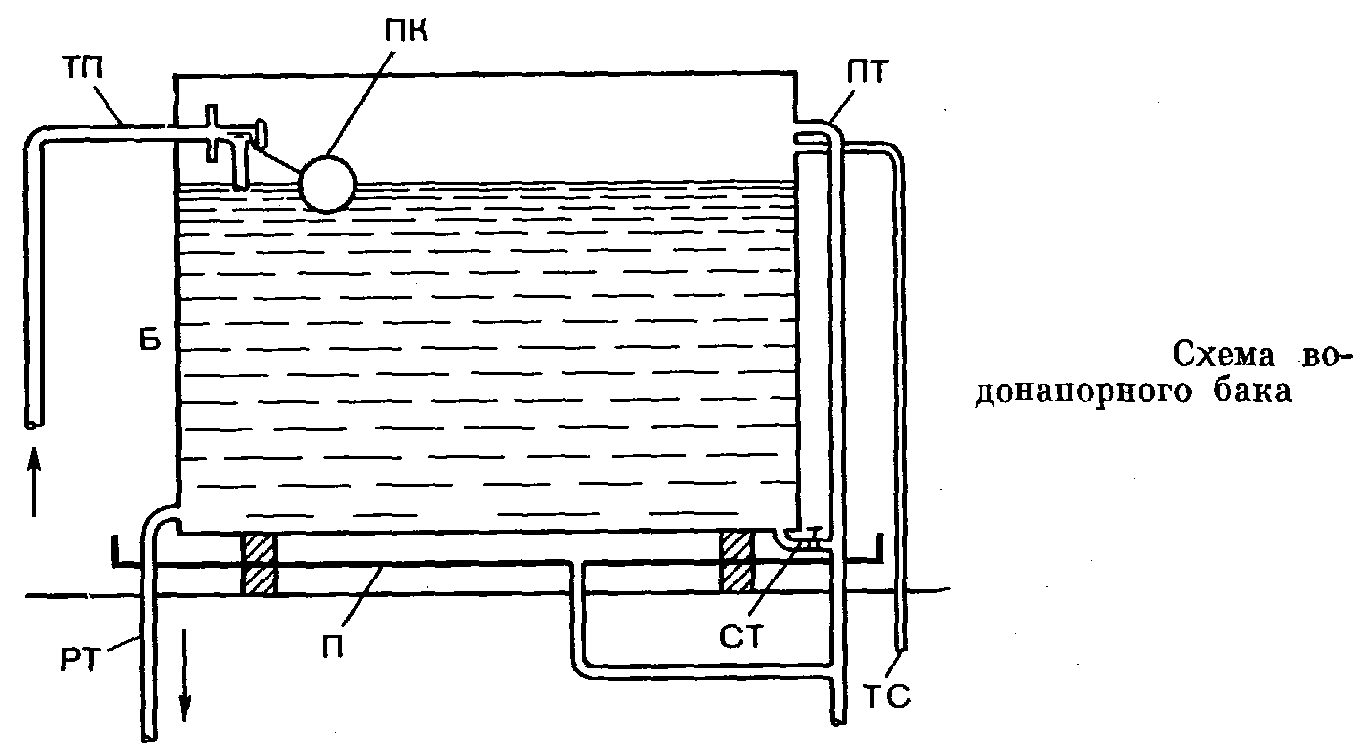
Двухпозиционный регулятор
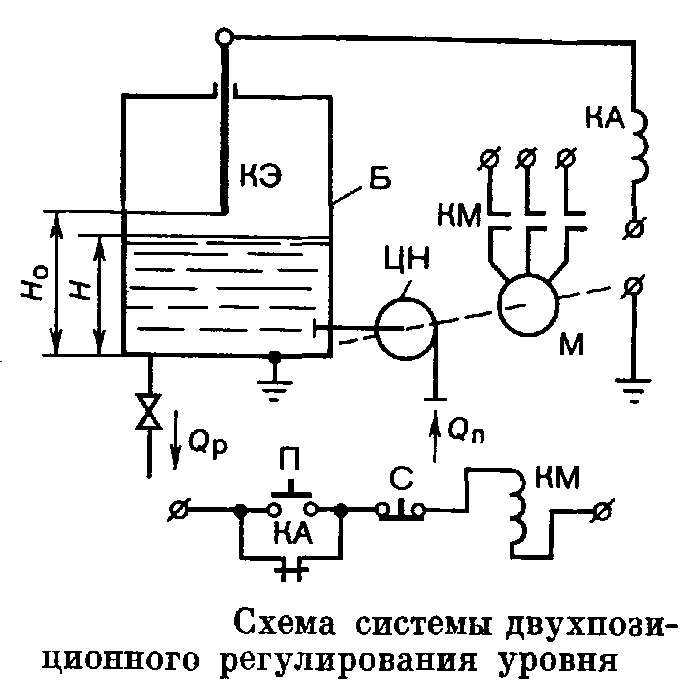
Примером этого типа регулятора может служить система автоматического управления уровнем жидкости
назначение Система совместно с исполнительными механизмами (насосами и др.) предназначена для:
-
автоматического регулирования уровня жидкости в открытых емкостях, отстойниках, накопителях
-
выдачи непрерывного сигнала (0....5)mA по уровню в другие системы
-
визуального контроля за уровнем жидкости.