

гидропривод_мет_машин
.pdfТаблица 12.7 Устройства обработки и преобразования сигналов
150

Элемент памяти представляет собой устройство, в котором при по ступлении входных сигналов значение выходных сигналов меняется на противоположное и сохраняется даже при изменении значения входных сигналов на нулевые. Линии обратной связи служат для введения в СУ промежуточных сигналов, определяемых состоянием выходов системы и назначением элементов обратной связи. Сигналы от элементов обратной связи в совокупности с входными сигналами определяют внутреннее со стояние СУ.
Рис. 12.1. Элемент памяти на электромагнитном реле
Под состоянием СУ понимают совокупность значений входных, выходных и промежуточных переменных в некотором период времени, в течение которого указанные переменные сохраняют неизменные значе ния. Различают устойчивые состояния СУ, когда состояния входных, вы ходных и промежуточных переменных остаются неизменными, и неус тойчивыми, когда состояние входных переменных изменилось, а состоя ние промежуточных и выходных переменных еще им не соответствует.
В случае, например, когда состояния входов не могут иметь "ме сто или когда проектировщику безразлично, как в данном случае сра батывает СУ, состояние входных переменных называют условным.
151

12.6. Синтез однотактных систем управления
Синтез однотактных систем управления выполняют разными мето дами. Ниже мы рассмотрим один из них, который основывается на ис пользовании таблицы состояния или таблицы истинности.
Для примера построим систему управления цилиндром, шток ко торого выдвигается при включении двух из трех входных устройств.
По заданным условиям функционирования составляется таблица состояний, в которую записываются все возможные комбинации входных переменных. Для каждой комбинации проставляется соответствующее значение выходной функции f.
Условное состояния в данном случае отмечено (см. табл. 12.8) «звездочкой». На дальнейших этапах с целью получения более простого выражения для выходной функции мы можем ее заменить 0 или 1.
|
Таблица возможных состояний |
Таблица 12.8 |
||
|
|
|||
|
|
|
|
|
XI |
Х2 |
хз |
|
f |
0 |
0 |
0 |
|
0 |
0 |
0 |
1 |
|
0 |
0 |
1 |
0 |
|
0 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
|
0 |
1 |
0 |
1 |
|
1 |
1 |
1 |
0 |
|
1 |
1 |
1 |
1 |
|
* |
В соответствии с вышеуказанными правилами перехода от таблич ной формы записи к алгебраической запишем:
Логическая функция записывается для каждого возможного выхо да (в данном примере для одного выхода). Найденная из таблицы состоя ний функция содержит избыточность и поэтому нуждается в упрощении. Упрощение сводится к минимизации числа членов логической функции, числа переменных в каждом члене и числа знаков логических операций.
152

Анализ логического уравнения показывает, что если задать для ус ловного состояния (обозначенного в таблице звездочкой) значение, рав ное 1, и ввести его в логическую функцию, то оно будет отличаться от имеющихся членов значением одной переменной. Это позволит, исполь зуя соотношения булевой алгебры, упростить вы
ражения. Итак:
Группируя, полу
чим:
Рис. 12.2. Электроконтактная схема
Для построения СУ в соответствии с полученной структурной формулой потребуется пять простейших логических элементов. Но можно еще более упростить вы ражение и свести к четырем, если преобразовать данную формулу путем вынесения за скобки переменной 
Схема реализации данной функции приведена на рис. 12.2..
153
12.7. Синтез многотактной системы управления
Для управления гидроприводом в соответствии с заданной диа граммой перемещения гидроцилиндра строится электроконтактная прин ципиальная схема.
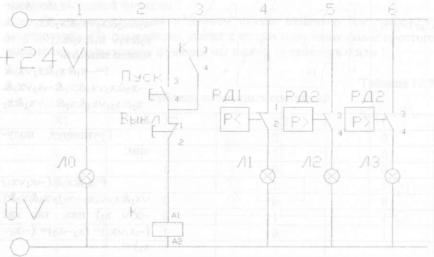
Система управления будет запитана от постоянного источника тока напряжением 24 В. Дтя контроля за источником питания предусмотрим сигнальную лампу ЛО (токопровод 1), непосредственно включенную в сеть.
Рис. 12.3. Включение электродвигателя и размещение сигнальных элементов
Для запуска насоса гидросистемы служит кнопка «Пуск» (токопровод 2), обеспечивающая включение электродвигателя насоса посредством контакта реле К (на схеме не указано), а для его отключения служит кнопка «Выкл» (доминирующее отключение). Самоподхват реле К обес печим размещением нормально разомкнутого контакта К в параллельной ветви (токопровод 3). Включение электродвигателя насосной станции можно осуществлять одновременно с питанием системы управления. Следовательно, его можно исключить из системы управления гидропри водом. В дальнейшем будем считать, что это происходит именно так, и не будем показывать на схеме.
154

За состоянием работы системы будут помогать отслеживать три сигнальные лампы Л1, Л2 и ЛЗ. Л1 будет сигнализировать о недопустимо малом давлении во всасывающей ветви, лампа Л2 сигнализировать о пре вышении некоторого порогового значения в нагнетательной ветви, а лам па ЛЗ - о нормальной работе гидроаккумулятора. Каждая из ламп сраба тывает в соответствии со своим элементом ввода сигналов реле давления РД1, РД2 и РДЗ. Чтобы не затенять чертеж, в дальнейшем построении принципиальной схемы эти элементы не показаны.
Для управления основным распределителем предусмотрим использо вание кнопки S, которая обеспечит включение катушки реле К1. После довательность включения электромагнитов распределителей будет опре деляться срабатыванием концевых датчиков Д1, Д2, ДЗ.
Здесь Д1 - электронный датчик индукционного типа, Д2 - емкост ного типа, а ДЗ - оптоэлектронного типа.
Рис.12.4. Размещение блокировочных устройств и элементов ввода сигналов схемы управления гидроприводом
На схеме, представленной на рис. 12.4, показана установка датчика Д1, который определяет начало работы системы управления в цикловом ре жиме. Датчики Д2 и ДЗ, а также реле времени РВ, необходимое нам для задания выдержки времени на выполнение срабатывания распределите лей, согласно диаграмме перемещения, пока не подсоединены. Электро магниты, управляющие основным распределителем (Р4) Y l , Y2 и вспомо гательным распределителем (Р5) Y3, размещаем в правой стороне схемы. Кроме этого, нам потребуется для синтеза схемы еще одно реле давления РД5, которое обеспечит возвращение штока в исходное положение при достижении уровня давления определяемого этим реле. При построении
155

схемы рассмотрим возможность использования вместо него уже имею щихся в схеме реле давлений.
Для синтеза цикловых систем управления существуют различные методы. В данном случае воспользуемся «шинным» методом. Для этого вначале в соответствии с заданной диаграммой перемещения построим структурную формулу. В ней будут приняты следующие обозначения.
ГЦ- и ГЦ+ - это соответственно втягивание и выдвижение гидро цилиндра ГЦ. ГЦ—и ГЦ++ - это быстрое втягивание и выдвижение гид роцилиндра ГЦ.
Имеем
ГЦ+ ГЦ - - Г Ц++ ГЦ - -.
Определяем количество шин. В соответствии с правилами в дан ном случае мы должны предусмотреть 4 шины
ГЦ+ |
ГЦ- |
ГЦ++ |
ГЦ- |
1 шина |
2 |
3 |
4 |
Для переключения шин воспользуемся сигналами от датчиков Д1, Д2, ДЗ, а также от реле давления РД5 и реле времени РВ. Первая шина будет включаться после нажатия кнопки S и при соблюдении следующих условий: шток цилиндра находится в крайнем левом положении (задейст вован датчик Д1), уровень масла соответствует нормальному (датчик уровня РУ), температура масла в баке не превышает предельного значе ния (датчик температуры РТ). Логическая функция, обеспечивающая включение 1-й шины, будет выглядеть так:
Включение первой шины обеспечит включение электромагнита Y1 распределителя Р4 и электромагнита Р5. Шток гидроцилиндра ГЦ будет выдвигаться с медленной скоростью (жидкость идет через дроссель РД4). После того, как шток выдвинется до первого упора (концевой датчик Д2), датчик Д2 выдает сигнал, который совместно с сигналом от реле давле ния РД5 обеспечивает переключение шин (с 1 на 2). Таким образом, ло гическая функция, включающая вторую шину, будет выглядеть так:
Ко второй шине подключается электромагнит Y2 распределителя Р4. Шток цилиндра будет втягиваться с большей скоростью, так как при этом распределитель Р5 будет отключен и жидкость будет перемещаться по линии, минуя дроссель РД4.
После возвращения штока гидроцилиндра ГЦ в исходное положе ние сработает датчик Д1 и будет подаваться сигнал на реле времени РВ.
156
После выдержки времени, определяемой настройкой РВ и условиями ра боты гидросхемы, на выходе из реле времени будет вырабатываться сиг нал, который приведет к переключению шин. Логическая функция, обес печивающая включение третьей шины, будет выглядеть так:
Д1 & РВ.
К третьей шине подсоединяется электромагнит Y1 гидрораспределите ля Р4. Шток гидроцилиндра ГЦ будет выдвигаться с максимальной скоро стью до конечного положения. После срабатывания оптоэлектронного дат чика ДЗ будет выработан сигнал, который можно использовать для пере ключения шин. Таким образом, включение четвертой шины буде осущест вляться датчиком ДЗ.
Подача питания к четвертой шине приведет к срабатыванию электро магнита Y2 распределителя Р4 и к возвращению штока ГЦ в исходное положение с максимальной скоростью (дроссель ДР; отключен). По воз вращении штока гидроцилиндра ГЦ в исходное положение датчик Д1 вырабатывает сигнал на отключение четвертой шины. На этом цикл за канчивается.
Принципиальная электроконтактная схема управления гидропри водом представлена на рис. 12.5.
12.8.Элементы гидроавтоматики
спропорциональным управлением
Гидрораспределители и напорные клапаны дискретного типа работа ют в качестве направляющей или поддерживающей определенное давле ние гидроаппаратуры. Для регулирования основных параметров гидро системы - расхода и давления, необходимо применять дроссели, клапаны давления различных конструкций. Количество данной дополнительной гидроаппаратуры определяется количеством ступеней регулирования расхода и давления, что значительно усложняет конструкцию гидропри вода машины.
В последнее время в сложных металлургических и подъемно- транспортных машинах нашли применение распределители и другие гид роаппараты с пропорциональным управлением. С их помощью можно осуществлять разностороннее управление гидроцилиндрами, в частности, управлять ускорением, перемещением и торможением гидродвигателя.
157

Рис. 12.5. Принципиальная электроконтактная схема
158

Условное обозначение пропорционального распределителя представ лено на рис. 12.6.
Рис. 12.6. Схема гидравлических аппаратов
спропорциональным управлением:
а- распределитель; б - предохранительный клапан
Вкачестве управляющего элемента в гидроаппаратуре с пропорцио нальным управлением применяется пропорциональный электромагнит с силовой характеристикой, близкой к линейной. В данном электромагните сила, развиваемая якорем, зависит от тока в обмотке. Форма магнитопровода катушки подобрана так, что усилие остается практически постоянным на всем ходе якоря при одном и том же значении тока в обмотке. Якорь элек тромагнита помещен в корпус, заполненный рабочей жидкостью из слив ной линии.
Кроме распределителей применяют различные гидроапнараты с электрическим пропорциональным управ
Предохранительный |
клапан с пропорциональным управлением |
(рис. 12.6, б) состоит из |
вспомогательного клапана предварительного |
управления с электромагнитом пропорционального действия и основного клапана. Предохранительный клапан этого типа используется в тех же целях, что и отмеченный выше предохранительный клапан с предвари тельным управлением. Он отличается тем, что вместо пружины здесь применяется магнит пропорционального действия, на который настроен вспомогательный конус предварительного управления. В обычном клапа-
159