

5. Основные воздействия на объект управления. Нахождение передаточных функций по управлению, возмущению, для замкнутых и разомкнутых систем.
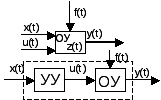
Задающее воздействие или входное воздействие х(t) – это воздействия которое планируется.
Управляющее воздействие (U(t)) – воздействие обусловлено управляющим уравнением и оказывает влияние на субъекты управления.
Внешнее
воздействия f(t)
– воздействие не планируемое, т.е.
случайное (параметры окружающей среды).
Выходное у(t)
– управляемое переменной, данная
величина характеризует параметры
объекты управления. Внутреннее x(t)
– обусловлено
влиянием одних систем на другие.
Передаточной функцией системы по управляющему воздействию называется отношение изображения выходной величины системы к изображению управляющего воздействия при нулевых начальных условиях.
Передаточная функция замкнутой системы по управляющему воздействию обозначается Ф(р). Она равна:
где Х{р) = L[x(t)] — изображение по Лапласу выходной величины замкнутой системы при нулевых начальных условиях; G(p) = Z,[g(/)] — изображение по Лапласу управляющего воздействия.
Передаточная функция разомкнутой системы по управляющему воздействию обозначается W (р). Она равна:
где Хр(р) = L[xp(t)] — изображение по Лапласу выходной величины разомкнутой системы при нулевых начальных условиях.
Передаточной функцией системы по возмущающему воздействию называется отношение изображения выходной величины системы к изображению возмущающего воздействия при нулевых начальных условиях.
Передаточная функция замкнутой системы по возмущающему воздействию обозначается У(р). Она равна:

где F{p) = ?[/(/)] — изображение по Лапласу возмущающего воздействия.
Передаточная функция разомкнутой системы по возмущающему воздействию обозначается V(р). Она равна:

При определении передаточных функций разомкнутых систем имеется в виду, что рассматривается поведение разомкнутой системы, у которой главная отрицательная обратная связь разомкнута.
6. Методика построения временных и частотных характеристик систем управления. Доделать
Временные и частотные характеристики однозначно связаны с уравнениями звеньев (и систем) и наряду с ними являются исчерпывающим описанием динамических свойств звеньев (и САУ в целом).
Временные характеристики представляют собой функции времени и служат для оценки динамических свойств элементов при их исследовании в плоскости действительного переменного t. К временным характеристикам относятся: переходная характеристика и импульсная переходная характеристика или ее еще называют весовая характеристика. Временные характеристики используются при описании линейных систем, как стационарных, так и нестационарных.
7 Типовые входные воздействия.
В качестве типовых задающих воздействий используют:



Рисунок 1 Типовые функции входного сигнала
1) единичное ступенчатое воздействие 1(t) – это функция, неизменная по величине и равная единице для всех моментов времени t>0, а при всех значениях t<0 равна 0. Например, подключение напряжения к звену или системе, начало обработки на станке, возмущение в виде ударов в механических системах и др.
Аналитически единичная функция может быть представлена таким образом:
1(t)
=
2) Дельта-функция
 – это функция Дирака, которая представляет
собой импульс бесконечно большой
амплитуды с бесконечно малой длительностью.
Как
правило, это шумы, помехи.
– это функция Дирака, которая представляет
собой импульс бесконечно большой
амплитуды с бесконечно малой длительностью.
Как
правило, это шумы, помехи.
Аналитическая форма представления дельта-функции следующая:

Между единичной ступенчатой функцией и дельта-функцией существует связь вида:
 .
.
3) Гармонический сигнал
 – гармонические колебания с постоянной
амплитудой, равной 1.
– гармонические колебания с постоянной
амплитудой, равной 1.
Этот сигнал может задаваться как в комплексной, так и в вещественной форме, в виде синусоидального или косинусоидального колебания:


 ,
,
где А
– амплитуда колебаний, равная 1.
 – круговая частота, определяемая как
– круговая частота, определяемая как
 ,
где Т – период;
,
где Т – период;
 –начальная фаза.
–начальная фаза.
Рассмотренные виды задающих воздействий имеют различное назначение. В случае применения единичного ступенчатого воздействия рассматривается переходной процесс, возникающий в элементе при переходе его из одного равновесного состояния в другое. Применение гармонического воздействия позволяет получить частотные характеристики системы.
Таким образом, в зависимости от применения определенного вида задающего воздействия динамические характеристики элементов можно разделить на два типа: временные характеристики, характеризующие свойства элементов в переходном режиме и частотные характеристики, отражающие свойства элементов в вынужденном движении.
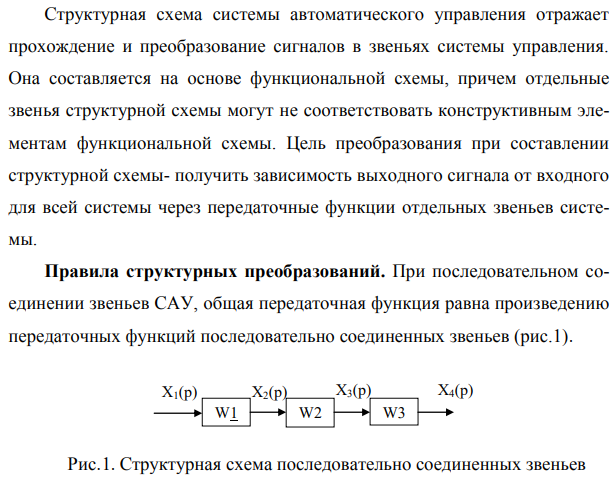
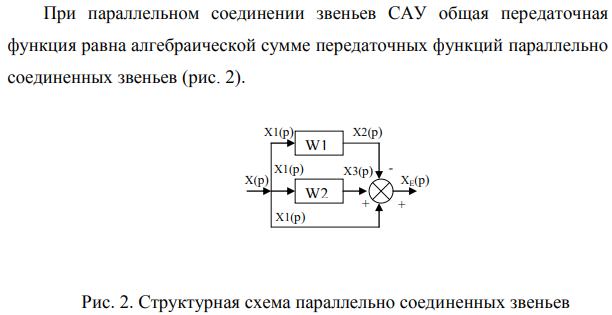
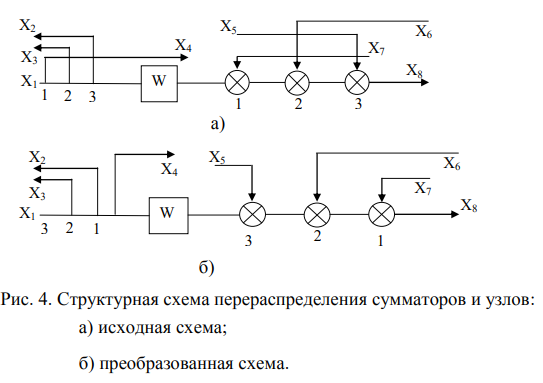
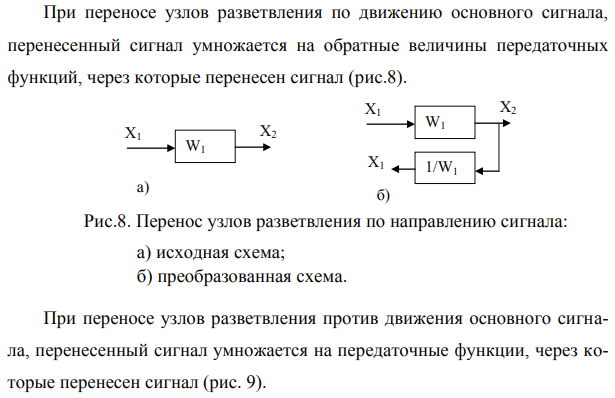
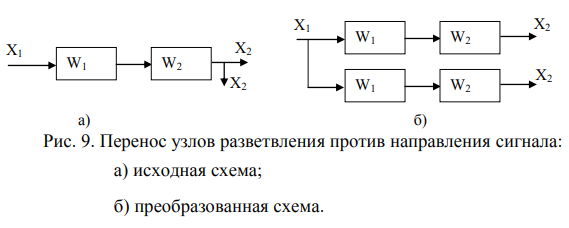
8. Структурные схемы и их преобразования.




9. Непрерывные многомерные системы.
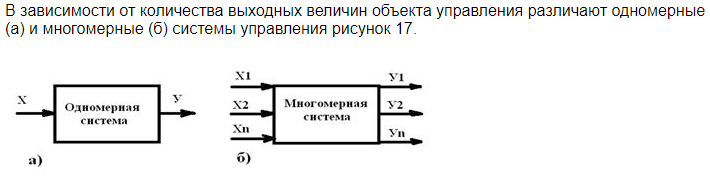
Система непрерывного действия состоит только из звеньев непрерывного действия, т.е. звеньев, выходная величина которых изменяется плавно и непрерывно при плавном изменении входной величины.