

Дискретный анализ и теория автоматов. Методические указания для самостоятельной работы студента
.pdfВідмінність лише у тому, що автомат Мура реагує на вхідне слово із запізненням на один такт.
|
|
|
|
|
z1 |
|
|
|
|
|
z2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
||
z3 |
|
|
|
|
z1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
q3 |
|
|
z1 |
|
|
|
q0 |
|
w0 |
|||
|
|
|
|
|
|
|
|
|
|||||
|
w3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
z2 |
z |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
z |
2 |
|
|
|
4 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
z3 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
z2 , z4 |
|
|
|
|
z1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
z3 |
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
q |
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
w2 |
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
z2 , z4 |
|
|
w1 |
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
z1 , z4 |
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
z3 |
|
|
|
|
z4 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q4 |
z3 |
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w4
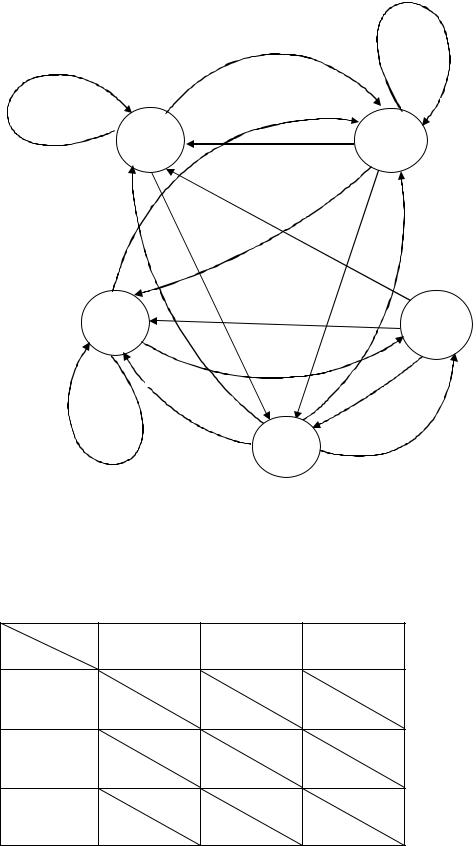
Рисунок 8 – Орграф автомата Мура
31
|
|
|
z1 |
|
w0 |
z2 |
|
|
|
w3 |
|
|
|
|
|
|
|
|
z1 |
w0 |
|
|
|
|
|
|
|
|
w0 |
||
|
z3 |
|
|
|
|
|
|
|
q3 |
w3 |
|
|
q0 |
|
|
|
|
|
z1 |
|
|||
|
|
|
|
|
|
|
|
|
|
w3 z2 |
w3 |
|
z4 |
w0 |
|
|
|
|
|
|
|||
|
|
|
|
z3 |
|
||
|
|
|
z2 , z4 |
|
z1 |
|
|
|
|
|
|
|
|
||
|
|
w2 |
|
|
z2 |
|
|
|
|
q2 |
w2 |
|
z3 |
q1 |
|
|
|
|
|
|
|
||
w2 |
|
w2 |
|
z2 , z4 |
|
w1 |
w1 |
|
|
|
|
|
|
||
|
|
z3 |
|
w4 |
|
z1 , z4 |
|
|
|
|
|
w4 |
|
|
|
|
|
|
|
q4 |
|
|
|
|
|
|
z4 |
|
|
|
|
|
|
|
|
|
z3 |
|
|
|
|
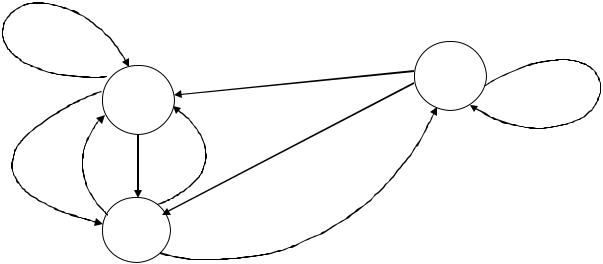
Рисунок 9 - Орграф автомата Мілі |
|
|
|||
|
|
|
Завдання 4 |
|
|
|
|
Автомат Мілі заданий суміщеною таблицею переходів-виходів: |
|
||||||
|
q(t) |
q0 |
|
q1 |
q2 |
|
|
z(t) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
z1 |
|
q2 |
|
q2 |
q0 |
|
|
|
|
|
w3 |
w |
|
|
|
|
|
w |
|
|
|
||
|
|
2 |
|
|
3 |
|
|
z2 |
|
q0 |
|
q0 |
q1 |
|
|
|
w3 |
|
|
|
|
|
|
|
|
|
w2 |
w1 |
|
|
|
z3 |
|
q2 |
|
q1 |
q0 |
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
|
w1 |
w1 |
|
|
Потрібно виконати наступне: |
|
|
|
|
|||
1)побудувати орграф заданого автомата Мілі;
2)побудувати орграф автомата Мура, еквівалентного автомату Мілі;
32
3) перевірити еквівалентність автоматів Мілі та Мура методом аналізу реакції автоматів на вхідне слово р (t) = z1 z2 z2 z3 z1 z2 z3, взявши стан q0 за початковий із сигналом
на виході w1 (або іншим, що для початкового стану неістотно).
Розв’язання
1) орграф автомата Мілі, заданий таблицею переходів-виходів, подано на рис. 10;
z2 |
w3 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
w2 |
z2 |
q1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
z3 |
|
q0 |
|
|
z1 |
|
z3 |
|
|
|
|
|
|
||
w1 |
|
|
w3 |
|
|
|
w1 |
|
z1 |
|
|
|
w1 |
|
|
|
|
|
|
|
|
||
z3 |
w2 |
|
z1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
w1 |
q |
|
|
w3 |
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
z2
Рисунок 10 – Орграф автомата Мілі
2) із принципа роботи автомата Мілі впливає, що у стані q0 (рис. 10) автомат на поточному такті формує сигнали виходу w1 , w2 і w3 як реакцію на сигнали входу z3, z1 і z2 відповідно, у стані q1 – сигнали w1 , w2 і w3 як реакцію на сигнали входу z3, z2 і z1, у стані q2
– сигнали w1 і w3 як реакцію на сигнали входу z2, z3 і z1. В автоматі Мура ці вихідні сигнали
формуються не в поточному такті t (і стані q (t), як в автоматі Мілі), а в наступному, t + 1 -му такті (стані q (t + 1)), одночасно зі зміною стану автомата. Тому кожний стан автомата Мілі за еквівалентного перетворення в автомат Мура поділяється на декілька станів (вершин орграфа), кількість яких дорівнює кількості різних сигналів виходу. У нашому випадку вершина q0 (рис. 10) поділяється на 3 вершини q0 , q01 , що відображають на графі
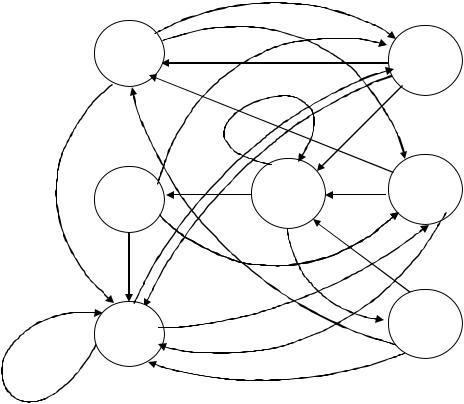
однойменні стани, в яких автомат Мура видає сигнали w1 , w2 і w3 відповідно, вершина q2 ‒ на 3 вершини q2 , q21 , q22 , в яких автомат видає сигнаи w1 , w2 і w3 відповідно, вершина q1 зберігається єдиною. Орграф автомата Мура, еквівалентний автомату Мілі, подано на рис.11;
3) перевіримо еквівалентність автоматів Мілі та Мура методом аналізу реакції автоматів на вхідне слово р (t) = z1 z2 z2 z3 z1 z2 z3, взявши стан q0 за початковий із сигналом на
виході w1.
Реакція автомата Мура на вхідну послідовність р (t)
Вхідне слово р (t) |
z1 |
z2 |
z2 |
z3 |
z1 |
z2 |
z3 |
|
Послідовність станів q (t) |
q0 |
q21 |
q1 |
q01 |
q2 |
q02 |
q02 |
q2 |
|
|
|
|
|
|
|
|
|
Вихідне слово w (t) |
w1 |
w2 |
w1 |
w2 |
w1 |
w3 |
w3 |
w1 |
|
|
|
|
|
|
|
|
|
33
|
|
|
|
|
z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
|
q |
0 |
|
|
z3 |
|
|
|
q2 |
w1 |
|
|
|
|
|
|
|
|
|
|
|
|||
z2 |
|
|
|
|
z3 |
z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
z3 |
|
|
|
|
|
|
z2 |
z1 |
|
|
|
|
|
|
|
|
z3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z2 |
q |
z3 |
w2 |
|
|
|
q01 |
|
z2 |
|
q |
||||||
w2 |
|
|
|
|
1 |
|
|
21 |
|
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
w1 |
|
z2 |
|
|
|
|
|
|
z2 |
z3 |
|
|
|
|
|
|
z1 |
|
|
|
|
|
|
|
z1 |
z1 |
|
|
|
|
|
|
|
|
|
|
|
z1 |
|
z1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
q |
|
|
|
|
q22 |
w3 |
||||
|
|
02 |
|
|
z1 |
|
|
|||||
z2 |
w3 |
|
|
|
|
|
z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
z1 |
|
|
Рисунок 11 – Орграф автомата Мура
Реакція автомата Мілі на вхідну послідовність р (t)
Вхідне слово р (t) |
z1 |
z2 |
z2 |
z3 |
z1 |
z2 |
z3 |
|
|
|
|
|
|
|
|
|
|
Послідовність станів q (t) |
q0 |
q2 |
q1 |
q0 |
q2 |
q0 |
q0 |
q2 |
|
|
|
|
|
|
|
|
|
Вихідне слово w (t) |
w2 |
w1 |
w2 |
w1 |
w3 |
w3 |
w1 |
|
|
|
|
|
|
|
|
|
|
Як бачимо, автомати Мура та Мілі еквівалентні, оскільки вони однаково реагують на одне й те саме вхідне слово р (t) = z1 z2 z2 z3 z1 z2 z3 вихідною послідовністю
w (t) = w2 w1 w1 w1 w3 w3 w1.
Відмінність лише у тому, що автомат Мура реагує на вхідне слово із запізненням на один такт.
3.5 Розділ 5. Структурний синтез автоматів
Завдання 1
Автомат Мура заданий поміченою таблицею переходів (табл. 3).
34
Таблиця 3 – Таблиця переходів автомата Мура
z(t) |
z2 |
z6 |
z10 |
z11 |
z13 |
|
|||||
w(t), q(t) |
|
|
|
|
|
|
|
|
|
|
|
w0, q0 |
q3 |
q0 |
q0 |
q2 |
q0 |
w1, q1 |
q1 |
q3 |
q2 |
q0 |
q0 |
w2, q2 |
q0 |
q1 |
q1 |
q1 |
q0 |
|
|
|
|
|
|
w3, q3 |
q2 |
q2 |
q3 |
q3 |
q0 |
Потрібно виконати наступне:
1)за таблицею переходів побудувати орграф автомата Мура;
2)визначити необхідну кількість тригерів як елементів пам’яті, вибрати тип тригерів та виконати кодування станів автомата;
3)накреслити функціональну схему автомата Мура з використанням тригерів вибраного типу та пояснити процес його функціонування;
4)розробити комбінаційні схеми у складі автомата Мура.
Розв’язання
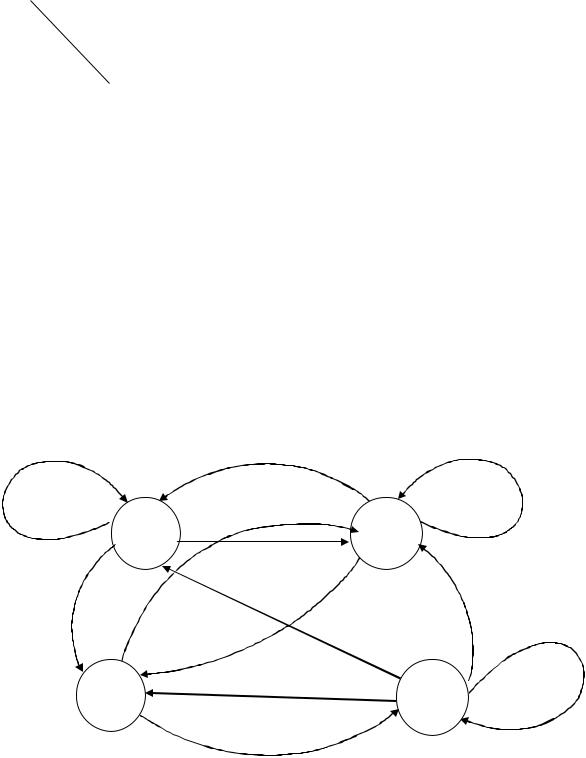
1) орграф автомата Мура подано на рис. 12.
|
|
|
|
|
|
|
|
|
|
|
|
z2 |
|
|
|
|
|
|
|
|
|
|
w3 |
|
|
|
|
|
|
|
|
|
z6, z10, z13 |
||||
z10, z11 |
|
|
|
|
z |
, z |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
2 |
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q3 |
|
|
|
|
|
|
|
|
|
q0 |
|
|
|
|
|
|
|
z13 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
z11 |
|
|
|
w0 |
|
|
||
z2 , z6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z11, z13 |
|
|
|
|
|
|
|
|
|
|
|
z6 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
z10 |
|
|
|
|
|
|
|
z2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
w2 |
1 |
|
z6, z10, z11 |
||
|
Рисунок 12 – Орграф автомата Мура
2) кількість станів автомата M = 4. Всі 4 стани автомата можна закодувати 2- розрядним двійковим кодом, тому кількість тригерів у блоці пам’яті автомата
n = log2 4 = 2 = 2 .
35
Для кодування 4 станів автомата можна обмежитися використанням лише двійкових сигналів на прямих виходах 2 тригерів, без використання сигналів на їхніх інверсних виходах. Тому в блоці пам'яті можемо застосувати тригери RS-типу.
Виконаємо кодування станів автомата. Для зручності нагадаємо таблицю входів RS-тригера (табл. 4). Результати кодування подані в таблиці 5.
Таблиця 4 ‒ Таблиця входів RS-тригера
Q(t) |
Q(t + 1) |
|
|
0 |
1 |
0 |
0 |
10 |
1 |
01 |
0 |
|
|
|
S (t) R (t)
Таблиця 5 – Кодування станів та умови переходів автомата
Поточний |
Код |
|
Наступ- |
Сигнал |
|
|
Значення функцій |
||||
стан |
поточ- |
|
ний |
|
|
|
|
збудження |
|
||
|
|
|
|
стан |
|
|
|
|
|
|
|
|
a2 |
|
a1 |
входу |
виходу |
S2 |
|
R2 |
S1 |
R1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
q0 |
0 |
|
0 |
q0 |
z6 z10 z13 |
w0 |
0 |
|
|
0 |
|
|
|
|
|
|
|
(0 0 1) |
(0 1 1) |
||||
|
|
|
|
|
|
|
|
|
|
||
q0 |
0 |
|
0 |
q2 |
z11 |
w2 |
1 |
|
0 |
0 |
|
|
|
|
|
|
|
(1) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
q0 |
0 |
|
0 |
q3 |
z2 |
w3 |
1 |
|
0 |
1 |
0 |
q1 |
0 |
|
1 |
q0 |
z11 z13 |
w0 |
0 |
|
|
0 |
1 |
|
|
|
|
|
|
(0 1) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
q1 |
0 |
|
1 |
q1 |
z2 |
w1 |
0 |
|
|
|
0 |
|
|
|
|
|
|
(0) |
(0) |
||||
|
|
|
|
|
|
|
|
|
|
||
q1 |
0 |
|
1 |
q2 |
z10 |
w2 |
1 |
|
0 |
0 |
1 |
q1 |
0 |
|
1 |
q3 |
z6 |
w3 |
1 |
|
0 |
|
0 |
|
|
|
|
|
|
(0) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
q2 |
1 |
|
0 |
q0 |
z2 z13 |
w0 |
0 |
|
1 |
0 |
|
|
|
|
|
|
|
(0 1) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
q2 |
1 |
|
0 |
q1 |
z6 z10 z11 |
w1 |
0 |
|
1 |
1 |
0 |
q3 |
1 |
|
1 |
q0 |
z13 |
w0 |
0 |
|
1 |
0 |
1 |
q3 |
1 |
|
1 |
q2 |
z2 z6 |
w2 |
|
|
0 |
0 |
1 |
|
|
|
|
|
(0 1) |
||||||
|
|
|
|
|
|
|
|
|
|
||
q3 |
1 |
|
1 |
q3 |
z10 z11 |
w3 |
|
|
0 |
|
0 |
|
|
|
|
|
(0) |
|
(1 1) |
||||
|
|
|
|
|
|
|
|
|
|
||
Примітка 1. Символ « » означає, що тут може бути символ 1 або 0;
Примітка 2. a1 і a2 ‒ сигнали на прямих виходах тригерів (використовувати інверсні виходи немає необхідності).
3) функціональну схему автомата Мура з використанням синхронізованих RS-тригерів подано на рис. 13.
36
a2 |
|
S2 |
|
|
|
a1 |
|
R2 |
|
|
|
x1 |
КС1 |
S1 |
|
||
x2 |
|
|
x3 |
|
R1 |
x4 |
|
|
|
|
|
C |
|
|
S |
T |
C |
|
R |
|
S |
T |
|
|
C |
|
R |
|
a2 |
|
y1 |
|
|
|
|
|
y2 |
a1 |
КС2 |
y3 |
|
y4
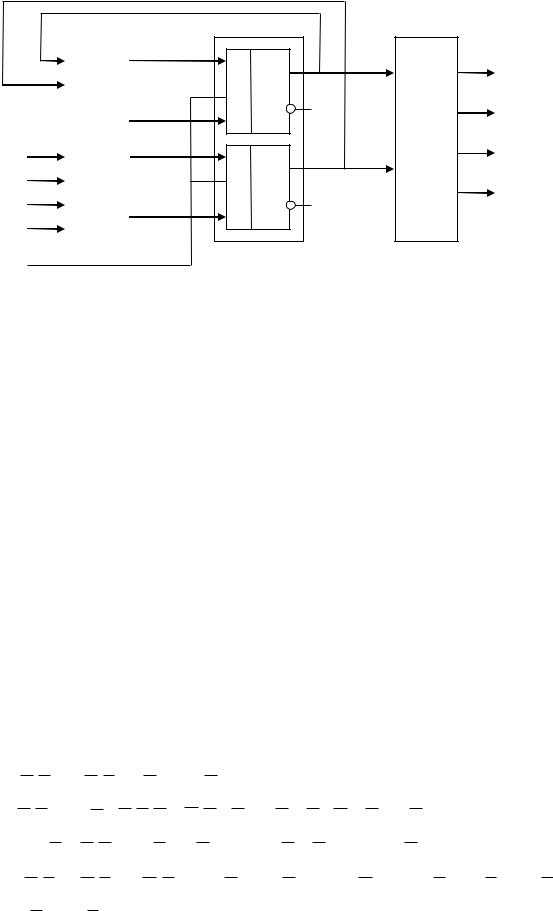
Рисунок 13 ‒ Функціональна схема автомата Мура
Автомат Мура (рис. 13) містить комбінаційні схеми КС1 і КС2. Перша з них служить для формування сигналів керування тригерами у блоці пам’яті (обведений пунктиром), а друга виконує функцію дешифратора, перетворюючи код (а2а1) стану автомата в сигнал 1 на одному з каналів виходу. Такти автоматного часу задаються синхросигналом С від тактового генератора (на рис. 13 не показаний).
Автомат функціонує таким чином. Після вмикання в роботу автомат приходить в початковий стан q0. Сприймаючі на вході сигнали 0 на всіх 6 каналах, автомат на кожному такті залишається у цьому стані з видачею на вихід сигналів y1 = 1, y2 = y3 = y4 = 0, доки не почнеться передача одного з кортежей z2, z6, z10, z11. Якщо на вході з’явився один із цих кортежів, то комбінаційна схема КС1 формує на своєму виході відповідний наступному стану автомата набір сигналів керування тригерами (згідно табл. 5) і за синхроімпульсом блок пам’яті видасть код (а2а1) нового стану автомата. Цей код перетворюється комбінаційною схемою (дешифратором) КС2 у сигнал 1 на одному з каналів виходу y2, y3, y4 і сигнал 0 на каналі y1. Якщо на деякому такті буде x1 = x2 = x3 = x4 = 0, що означає припинення корисної роботи автомата, то він перейде у початковий стан q0, як це і повинно бути для ініціального автомата. Якщо автомат зробити асинхронним, то він буде функціонувати так само, але перехід до наступного такту буде здійснюваться за зміною набору сигналів (x1x2x3x4) на його вході (з відповідною зміною сигналів на виході);
4) функціональну схему автомата Мура (рис. 13) можна вважати повністю розробленою, якщо відомі комбінаційні схеми КС1 і КС2. Тому виконаємо синтез цих схем.
Комбінаційна схема КС1 здійснює перетворення кортежу (а2а1x1x2x3x4) вхідних змінних у кортеж (S2R2S1R1) вихідних змінних. Кожна з останніх є певною, причому неповністю визначеною, логічною функцією аргументів а2, а1, x1, x2, x3, x4, взятих із табл. 5 для поточних станів автомата:
S2 = a2 a1 z11 + a2 a1 z2 + a2 а1z10 + a2 а1z6 + (а2а1z2+а2а1z6) + (а2а1z10+а2а1z11) =
= a2 a1 x1x2x3 x4 + a2 a1 x1 x2 x3 x4 + a2 а1x1 x2 x3 x4 + a2 а1 x1 x2x3 x4 +
+ (а2а1 x1 x2 x3 x4 +а2а1 x1 x2x3 x4 ) + (а2а1x1 x2 x3 x4 +а2а1x1x2x3 x4 );
R2 = ( a2 a1 z6+ a2 a1 z10+ a2 a1 z13) + ( a2 а1z11+ a2 а1z13) + ( a2 а1z2) +а2 a1 z2+а2 a1 z13+а2 a1 z6 +
+ а2 a1 z10+а2 a1 z11+а2а1z13 =
37
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=( a2 |
|
a1 x1 x2x3 x4 + a2 a1 x1 x2 x3 x4 + a2 a1 x1 x2 x3 x4 )+( a2 а1x1x2x3 x4 + a2 а1 x1 x2 x3 x4 )+ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
+ ( a2 а1 x1 x2 x3 x4 )+а2 a1 x1 x2 x3 x4 +а2 a1 x1 x2 x3 x4 +а2 a1 x1 x2x3 x4 + |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
+ а2 a1 x1 x2 x3 x4 +а2 a1 x1x2x3 x4 +а2а1 x1 x2 x3 x4 ; |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
S1 = a2 |
a1 z2+( a2 а1z2)+( a2 а1z6)+а2 a1 z6+а2 a1 z10+а2 a1 z11+(а2а1z10+а2а1z11) = |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
= a2 |
a1 x1 x2 x3 x4 +( a2 а1 x1 x2 x3 x4 )+( a2 а1 x1 x2x3 x4 )+а2 a1 x1 x2x3 x4 +а2 a1 x1 x2 x3 x4 + |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
+ а2 a1 x1x2x3 x4 +(а2а1x1 x2 x3 x4 +а2а1x1x2x3 x4 );
R1 = ( a2 a1 z6+ a2 a1 z10+ a2 a1 z13)+( a2 a1 z11)+ a2 а1z11+ a2 а1z13+ a2 а1z10+(а2 a1 z2+а2 a1 z13)+
+ а2а1z13+а2а1z2+а2а1z6 =
= ( a2 a1 x1 x2x3 x4 + a2 a1 x1 x2 x3 x4 + a2 a1 x1 x2 x3 x4 )+( a2 a1 x1x2x3 x4 )+ a2 а1x1x2x3 x4 + + a2 а1 x1 x2 x3 x4 + a2 а1x1 x2 x3 x4 +(а2 a1 x1 x2 x3 x4 +а2 a1 x1 x2 x3 x4 ) +
+ а2а1 x1 x2 x3 x4 +а2а1 x1 x2 x3 x4 +а2а1 x1 x2x3 x4 .
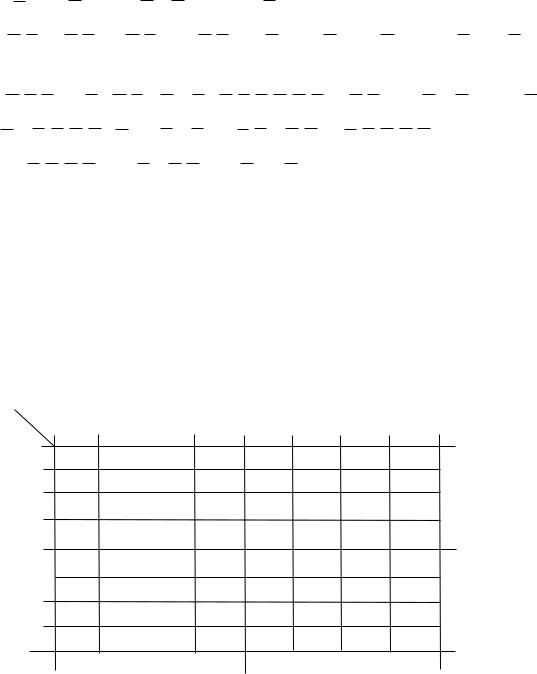
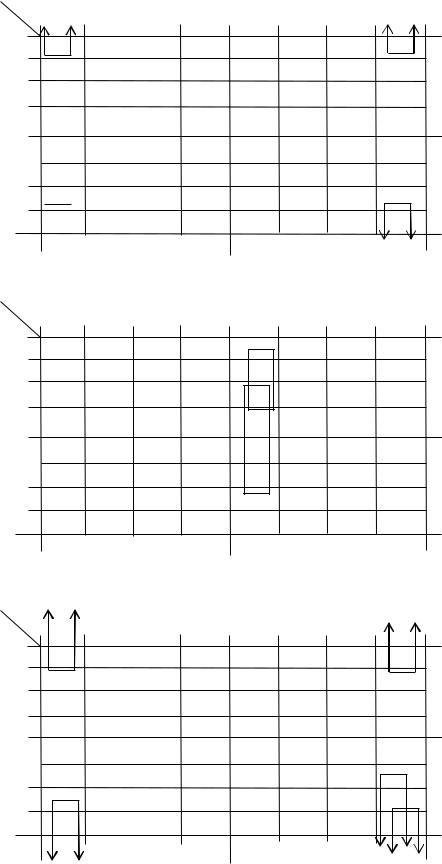
У виразах цих функцій конституенти одиниці, що охоплені дужками, відповідають невизначеним значенням S2, R2, S1 та R1, поміченим у клітинках таблиці 3 символом « ». Побудуємо таблиці істинності функцій S2, R2, S1 та R1 у вигляді карт Карно.
На картах Карно нами побудовані контури, що охоплюють 2 або 4 сусідні клитинки, помічені одиницями та символами « ». Контури, що охоплюють єдину клітинку, помічену одиницею, умовно не показані. Символи « », що ввійшли в контури, вважаємо заміненими на 1. Всі інші клітинки, що порожні або помічені символом « », вважаємо поміченими нулями. Отже, ми зробили довизначення функцій S2, R2, S1 та R1. Довизначені значення цих функцій показані в табл. 3 у дужках за структурою входу.
x3x4 |
|
S2 (a2, a1, x1, x2, x3, x4) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
x1x2 |
00 |
01 |
|
|
11 |
10 |
10 |
11 |
01 |
00 |
|
||||||||||
00 |
|
|
|
|
|
|
|
|
|
|
01 |
1 |
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
1 |
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
1 |
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
1 |
|
|
|
|
00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 =0 |
|
|
a2 =1 |
|
|
||
a1 = 0
a1 = 1
38
x3x4 x1x2 00
00 |
|
01 |
|
11 |
|
10 |
|
10
11
01
00 

x3x4 x1x2 00
00
01 1
11
10
10
11
01
00
R2 (a2, a1, x1, x2, x3, x4)
01 |
|
|
11 |
10 |
10 |
11 |
01 |
00 |
||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
a2 =0 |
|
|
|
|
a2 =1 |
|
|
||
S1 (a2, a1, x1, x2, x3, x4)
01 |
11 |
10 |
10 |
11 |
01 |
00 |
1
1
1
a2 =0 |
a2 =1 |
a1 = 0
a1 = 1
a1 = 0
a1 = 1
R1 (a2, a1, x1, x2, x3, x4)
x1x2 |
01 |
|
|
11 |
10 |
10 |
11 |
01 |
00 |
|
|||||||||
00 |
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
1 |
|
|
|
|
11 |
|
|
|
|
1 |
|
|
|
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
00 |
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
a2 =0 |
|
|
a2 =1 |
|
|
||
a1 = 0
a1 = 1
39

Маючі на увазі, що конституенти, яким відповідають клітинки, охоплені контурами, поглинаються їхньою власною частиною, одержимо такі тупикові функції:
S2 = a2 a1 x1 x2 x3 x4 + a2 a1 x1x2x3 x4 + a2 а1x1 x2 x3 x4 +а1 x1 x2x3 x4 ;
R2 = x1 x2 x3 x4 +а2 a1 x1 x3 x4 +а2 a1 x2x3 x4 +а2 a1 x1x3 x4 ;
S1 = a2 a1 x1 x2 x3 x4 +а2 a1 x2x3 x4 +а2x1x3 x4 ;
R1 = а2а1 x1 x2x3 x4 +а2а1 x1 x3 x4 + x1 x2 x3 x4 + a2 x1x3 x4 .
Вибрати іншу систему контурів можна лише в карті Карно функції R2. Однак це не призведе до скорочення тупикової функці R2. Тому візьмемо тупикові функцій S2, R2, S1 та R1 за мінімальні та перетворимо їх до вибраного нами базису І-Не:
S2 = (a2 a1 x1x2 x3 x4 ) (a2 a1x1x2 x3 x4 ) (a2a1x1 x2 x3 x4 ) (a1 x1x2 x3 x4 );
R2 = (x1 x2 x3 x4 ) (a2 a1 x1 x3 x4 ) (a2 a1x2 x3 x4 ) (a2 a1x1x3 x4 );
S1 = (a2 a1 x1x2 x3 x4 ) (a2 a1x2 x3 x4 ) (a2 x1x3 x4 );
R1 = (a2a1 x1x2 x3 x4 ) (a2a1 x1 x3 x4 ) (x1 x2 x3 x4 ) (a2 x1x3 x4 ).
Функціональну схему блоку КС1 автомата Мура (рис. 13) подано на рис. 14.
Комбінаційна схема КС2 (рис. 13) є автоматом Мура і по суті ‒ дешифратором. Побудуємо її таблицю істинності (табл. 6).
Таблиця 6 ‒ Таблиця істинності КС2
qi |
wi |
a2a1 |
y1 |
y2 |
y3 |
y4 |
q0 |
w0 |
00 |
1 |
0 |
0 |
0 |
q1 |
w1 |
01 |
0 |
1 |
0 |
0 |
q2 |
w2 |
10 |
0 |
0 |
1 |
0 |
q3 |
w3 |
11 |
0 |
0 |
0 |
1 |
На підставі таблиці 6 складемо формули логічних функцій, що реалізовуються
комбінаційною схемою КС2: |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1 = a2 a1 ; y2 = a2 a1; |
y3 = a2 a1 ; |
y4 = a2a1. |
|||||||||||
Ці функції не можуть бути скорочені, тому вони є мінімальними. Зведемо їх до |
|||||||||||||
вибраного базису Або-Не: |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
y1 = a2 + a1 ; |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 = a2 |
+ a1 ; |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y3 = a2 |
+ a1 ; |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y4 = a2 |
+ a1 . |
|
|
|
|
||||||||
Функціональну схему блока КС2 автомата Мура (рис. 13) подано на рис. 15.
40