

Лекция 10
Увеличение общего коэффициента усиления К разомкнутой цепи является методом повышения точности системы. При этом уменьшаются все виды установившихся ошибок системы.
Увеличение К осуществляется последовательным введением усилительного звена в общую цепь. Но увеличение К ведет и к ухудшению условия устойчивости, а значит и качества переходного процесса. Поэтому часто приходится делать это одновременно с введением производной.
Введение интеграла от ошибки является методом создания или повышения порядка астатизма системы, а значит, и увеличения ее точности (рис. 10.1).

Передаточная функция разомкнутой системы будет
![]() .
.
Подставив s
= jω,
получим
![]() .
.
Вследствие поворота фазы на – 90о ухудшаются условия устойчивости и качество переходного процесса (обратный эффект с введением производной по ошибке). Иногда это может привести и к неустойчивости замкнутой системы.
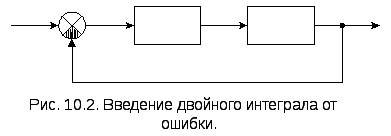
В случае введения двойного интеграла (рис. 10.2) система будет структурно неустойчивой (неустойчивой при любых значениях параметров), так как в характеристическом уравнении отсутствует член с первой степенью λ. Поэтому астатизм второго порядка реально возможен только при условии введения производных в закон управления, т.е. при наличии некоторого многочлена N(s) в числителе передаточной функции.
Изодромное корректирующее устройство (рис. 10.3) имеет передаточную функцию вида
![]() .
.

Объединяя в себе введение интеграла и производной, оно позволяет избежать недостатков предыдущего устройства и получать необходимый порядок астатизма системы, сохраняя ее устойчивость и качество.
Поскольку можно записать
![]() ,
,
то структурно изодромное устройство можно представить, как изображено на рис. 10.4.

Следовательно, если в случае простого введения интеграла (рис. 10.1) регулирование в системе производится не по величине ошибки ε, а только по интегралу от нее, то при изодромном устройстве мы получаем регулирование по ошибке и по интегралу (аналогично тому, как на рис. 9.5, было показано регулирование по ошибке и по ее производной).
Техническое осуществление изодромного устройства может быть различным (механическое, электрическое и др. устройства).
Возможны и более сложные передаточные функции последовательных корректирующих устройств – фильтров.
Типовые параллельные корректирующие устройства.
Рассмотрим параллельные корректирующие устройства в виде обратных связей (рис. 9.4). Основные виды корректирующих обратных связей следующие:
-
жесткая обратная связь
![]() ;
;
-
инерционная жесткая обратная связь
![]() ;
;
-
гибкая обратная связь
![]() ;
;
-
инерционная гибкая обратная связь
![]() .
.
Возможны и более сложные передаточные функции корректирующих обратных связей.
Проиллюстрируем на примерах основные свойства этих обратных связей при охвате ими различных типов звеньев.
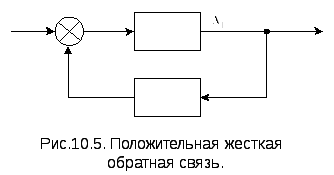
Положительная
жесткая обратная связь.
Пусть она охватывает апериодическое
звено (рис.10.5), т.е.
![]() .
Тогда общая передаточная функция будет
.
Тогда общая передаточная функция будет
![]() или
или
![]() ,
где
,
где
![]() .
.
Следовательно,
положительная обратная связь может
служить для увеличения коэффициента
усиления (передачи). Но надо иметь в
виду, что одновременно с этим увеличивается
и постоянная времени, т.е. инерционность
звена, а при
![]() звено становится неустойчивым.
звено становится неустойчивым.
Отрицательная жесткая обратная связь. При охвате ею апериодического звена получаем
![]() ,
где
,
где
![]() .
.
Следовательно,
отрицательная жесткая обратная связь
уменьшает инерционность звена. Тем
самым она улучшает качество переходного
процесса в системе и может оказывать
стабилизирующее действие, т.е. превращать
неустойчивую замкнутую систему в
устойчивую (подобно введению производной).
Уменьшение же коэффициента передачи
![]() при этом может быть скомпенсировано за
счет других звеньев системы.
при этом может быть скомпенсировано за
счет других звеньев системы.
При охвате
интегрирующего звена отрицательной
жесткой обратной связью, т.е. при
![]() получаем
получаем
![]() ,
где
,
где
![]() .
.
Видно, что под действием жесткой обратной связи теряется интегрирующее свойство звена, и оно превращается в апериодическое с коэффициентом усиления, который целиком определяется только обратной связью.
Постоянная времени
![]() будет мала при большом коэффициенте
усиления звена
будет мала при большом коэффициенте
усиления звена
![]() .
.
Указанный способ введения обратной связи применяется на практике, например, в приводных устройствах, чтобы сделать угол поворота выходного вала пропорциональным управляющему сигналу (напряжению).
Из выше изложенного ясно, что любую систему автоматического управления, как правило, можно разделить на две части: изменяемую и неизменяемую. В неизменяемую часть входят: объект управления, управляющий орган, система измерения управляемой величины (датчики, вторичные преобразователи сигнала) и др. Эти элементы системы управления не изменяют своих характеристик в процессе работы. На практике всю неизменяемую часть можно отнести к объекту управления и получить для него общую передаточную функцию Wо(s).
Изменяемая часть представляет собой совокупность различных технических устройств, параметры которых могут быть изменены в процессе эксплуатации. Основное функциональное назначение изменяемой части состоит в том, чтобы сккоректировать характеристики системы управления так, чтобы работа системы в целом удовлетворяла требуемым критериям качества. К изменяемой части относятся регулятор или другие корректирующие устройства.