

-
Автоматические регуляторы
Функционирование автоматических регуляторов основано на использовании отрицательной обратной связи. Обратная связь — воздействие результатов функционирования какой-либо системы на характер дальнейшего функционирования этой же системы. Отрицательная обратная связь (ООС) при отклонений объекта от равновесия вызывает нейтрализацию этого отклонения.
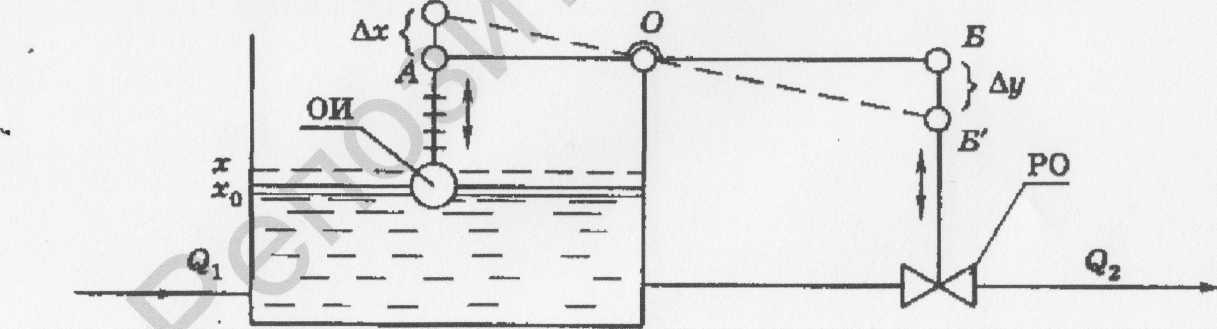
Различают регуляторы прямого (РИД) и непрямого (РНД) действия. РИД (рис. 1.5) приводятся в действие за счет энергии регулируемой среды. Их применяют, если усилия, развиваемого датчиком, достаточно для привода в действие регулирующего органа, который находится на относительно небольшом расстоянии от датчика.
А'
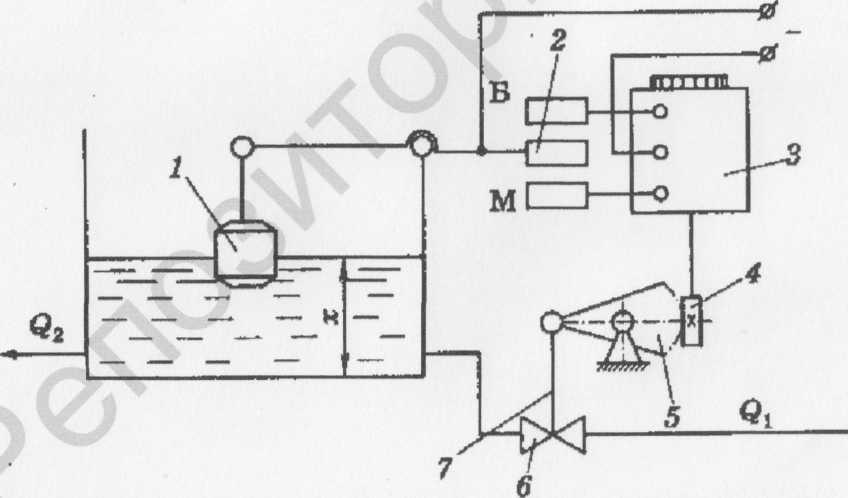
В регуляторах непрямого действия (РИД) для привода регулирующего органа используется энергия от постороннего источника. На рис. 1.6 приведена схема процесса непрямого регулирования уровня жидкости в резервуаре.
Измерительное устройство — поплавок 1 — при помощи рычагов связано с подвижным электрическим контактом 2, который может замыкаться с одним из неподвижных контактов: Б (больше) и М (меньше). В зависимости от того, с каким из этих контактов замкнут подвижный контакт, вал электродвигателя 3 вращается в ту или другую сторону. Через червячную зубчатую передачу 4 и 5, а также тягу 7 электродвигатель открывает или закрывает регулирующий орган — клапан 6, установленный на линии подвода жидкости <2; в бак.
Регулирующее воздействие регуляторов может быть прерывистым и непрерывным.
Регуляторы непрерывного действия бывают пропорциональные, интегральные, пропорционально-интегральные и пропорционально-интегральные с предварением [2].
Пропорциональный (статический) регулятор (ГТ-регулятор), осуществляет пропорциональную зависимость между положением регулирующего органа ^ и отклонением регулируемого параметра X,
у=К,х
где К1 — статический коэффициент передачи (усиления) регулятора, который может изменяться в широких пределах.
Интегральный регулятор (И-регулятор) — это регулятор, у которого при отклонении регулируемого параметра х от заданного значения регулирующий орган медленно перемещается все время в одном направлении, пока параметр не вернется к заданному значению. В этом регуляторе регулирующее воздействие пропорционально интегралу от отклонения параметра х, регулируемого по
времени,
![]()
где К2 — коэффициент передачи регулятора, характеризующий скорость исполнительного механизма.
Пропорционально-интегральныйрегулятор (ПИ-регулятор) сочетает положительные качества пропорционального и интегрального регуляторов. В первый момент после возникновения отклонения регулируемой величины ПИ- регулятор работает как П-регулятор, а затем как И-регулятор. Закон регулирования ПИ-регулятора содержит пропорциональную и интегральную со
ставляющие
![]()
ПИ-регуляторы позволяют осуществить регулирование без остаточного отклонения и применяются для регулирования процессов в объектах, обладающих значительным запаздыванием и отличающихся большими колебаниями нагрузки.
Пропорционально-интегральные регуляторы с предварением (ПИД- регуляторы) отличаются от обычных ПИ-регуляторов наличием дифференцирующего звена, т.е. дополнительным регулирующим воздействием по первой производной от параметра, регулируемого по времени,
где Тп — время предварения.
ПИД-регуляторы рекомендуется применять для многоемкостных объектов с очень большим временем запаздывания.