

Содержание
Введение 3
1 Постановка задачи 4
1.1 Математическая модель задачи 4
1.2 Входные данные 8
1.3 Выходные данные 8
1.4 Обработка ошибок 8
2 Разработка программного модуля 10
2.1 Разработка структурной схемы программного модуля 10
2.2Разработка программного модуля и ее описание 11
2.3Разработка пользовательского интерфейса 20
3 Реализация программного модуля 22
3.1Код программы 22
3.2 Описание используемых операторов и функций 28
4 Тестирование программного модуля 30
Заключение 33
Список использованной литературы 35
Введение
Целью данной курсовой работы является разработка программного модуля, позволяющего построение механизма и воспроизведение его движения, начиная с заданного начального положения, построение диаграммы перемещения, скорости и ускорения выходного звена. Проект необходимо выполнить в программе Microsoft Office Excel, используя язык программирования - Visual Basic for Application.
1 Постановка задачи
1.1 Математическая модель задачи
Структурная схема механизма представлена на Рисунке 1.1

Рисунок 1.1 – Структурная схема механизма
Определение количества звеньев и кинематических пар:
1 - Кривошип – вращательное движение.
2 - Кривошип – вращательное движение.
3 - Шатун – плоскопараллельное движение.
4 - Ползун – поступательное движение.
5 - Ползун – поступательное движение.
1 – входное звено, 5 – выходное звено.
Определение числа кинематических пар.
В данном механизме 7 кинематических пар:
O1(0;1) - вращательная
O2(0;2) - вращательная
А (1;3) - вращательная
В (2;3) - вращательная
С (4;5) - поступательное движение
C’ (4;5) - поступательное движение
D(5;0) - поступательное движение
Определяем число степеней свободы данного механизма:
 (1)
(1)
где k - количество подвижных звеньев, входящих в состав механизма;
 -
соответственно количество одноподвижных
и двухподвижных кинематических пар;
-
соответственно количество одноподвижных
и двухподвижных кинематических пар;
В
данном механизме k
=5,
 =7,
=7,
 =0
(так как нет двухподвижных кинематических
пар).
=0
(так как нет двухподвижных кинематических
пар).

Структурные группы механизма:
Разложение механизма на структурные группы и определение их класса и порядка.
Все рычажные механизмы состоят из входного звена (начального механизма) и присоединенных к нему структурных групп(диад).

Рисунок 1.2 – Кривошип 1
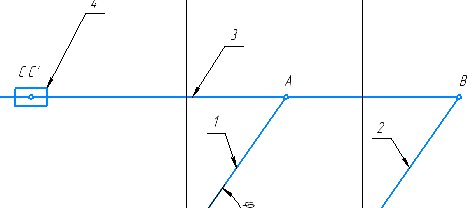
Рисунок 1.3 –Диада (1,3)
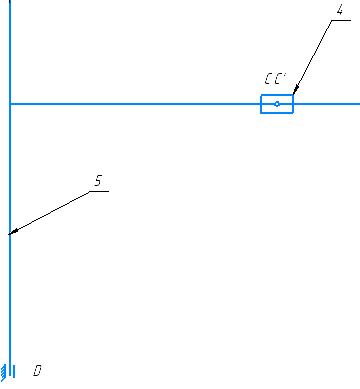
Рисунок 1.4-Диада(4,5)
Исходные данные
Построение математической модели механизма:
Длина
кривошипа
 = 75мм;
= 75мм;
Длина
кривошипа
 = 75мм;
= 75мм;
Длина
шатуна
 = 187.5 мм;
= 187.5 мм;
Длина
кривошипа
 =
75 мм;
=
75 мм;
Расстояние
до кулисы
 = 187.5 мм;
= 187.5 мм;
Расстояние
до кулисы
 = 75 мм;
= 75 мм;
Расстояние до точки D = 187.5 мм ;
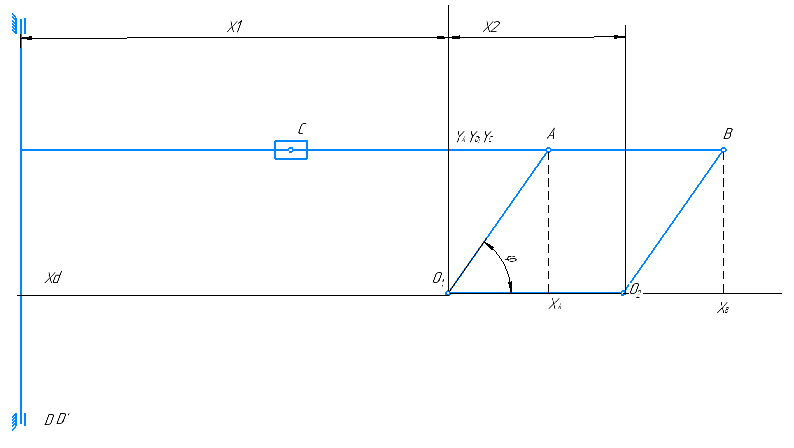
Рисунок 1.5 – Расчетная схема для определения координат
Определение координаты точки А:
 ,
(1)
,
(1)
 .
(2)
.
(2)
Определение координаты точки O2:
 , (3)
, (3)
 =YO1. (4)
=YO1. (4)
Определение координаты точки B:
Из параллелограмма O1ABO2 т.к. AO1=BO2=AB=O2B тогда :
 =
= , (5)
, (5)
 . (6)
. (6)
Определение координаты точки C:
 , (7)
, (7)
 . (8)
. (8)
Определение координаты точки D :
 +2.5*
+2.5* =const, (9)
=const, (9)
 . (10)
. (10)
1.2 Входные данные
-
длина кривошипа;
-
начальный угол поворота кривошипа.
Требования к входным данным:
-
предусмотреть проверку на допустимость исходных данных и повторение ввода при ошибочных данных;
-
ввод исходных данных осуществлять в соответствующие поля ввода пользовательской формы;
-
ограничения на значения входных данных:
-
длина кривошипа должна быть только положительным числом;
-
длина кривошипа и начальный угол поворота кривошипа должны быть только цифрами.