

КТПСА_ЛАБ4_Черкашин
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ХАРЬКОВСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ РАДИОЭЛЕКТРОНИКИ
Кафедра СТ
Отчет по лабораторной работе № 4 по дисциплине: «Компьютерные технологии проектирования систем автоматики»
Выполнил: Проверил:
Ст. гр. АКТСИу-17-1 доцент каф. СТ
Черкашин В.А. Ребезюк Л.Н.
Харьков 2020
4 СИНТЕЗ САР
4.1 Цель работы
Приобретение навыков использования метода логарифмически частотных характеристик и метода корневых годографов для синтеза САР.
4.2 Индивидуальный вариант
4.2.1 В соответствии с вариантом (вариант 10) (табл. 4.1) построить располагаемую ЛАЧХ объекта регулирования. Учитывая требования к точности и к устойчивости, нанести на график располагаемой ЛАЧХ объекта регулирования требуемую ЛАЧХ системы, построенную по точкам (т.е. асимптотически). Выполнить анализ взаимного расположения двух ЛАЧХ и определить низкочастотную и высокочастотную Запретные области.
Согласно варианта задания задана схема модели (файл «W2_1y.VSM»). ПФ объекта, требования к точности и запаса устойчивости Приведены в таблице 4.1.
Принцип управлении - по отклонению, ПФ обратной связи: W (p) = 1; закон управлении - отсутствует, задающий сигнал g (t) = 1 (t).
Таблица 4.1 - Варианты заданий (АКТСИу-17-1)
|
Параметры |
Значения |
|
Располагаемая передаточная функция объекта |
|
|
Требования: к точности |
Vm= 9 ед. / С; Em = 110 ед. / С2; Xm = 0,02 ед. |
|
к запасу устойчивости |
M <1,15 |
Xm - максимальная амплитуда ошибки;
Vm - максимальная скорость слежения;
Em - максимальное ускорение слежения
Kv - добротность по скорости;
Ke - добротность по ускорению;
wk - контрольная частота;
М - колебательности;
4.3 Попытка настроить ПИД-регулятор
Для оптимизации системы были использованы ПИД-регуляторы из файлов err ^ -1.vsm (по лабораторной работе №2), где заменили блок объект управления в то, что дан по индивидуальному варианту.
Результаты конфигураций ПИД-регуляторов изображенные на рисунках 4.1 и 4.2.
Рисунок 4.1 - Попытка настройки ПИД-регулятора в err ^ -1.vsm
Рисунок 4.2 - Попытка настройки ПИД-регулятора в podbor.vsm
Как видим, в обоих моделях настройки заканчивается ошибками, поскольку, из-за сложности системы (высокий порядок ПФ системы), почти невозможно настроить ПИД-регулятор чтобы лучшее качество управления.
4.3.2 Построение ЛАЧХ объекта регулирования и запрещенных (НЧ и ВЧ) областей
Метод ЛАЧХ состоит из следующих этапов:
- снимается ЛАЧХ объекта управления;
- по заданным параметрам как требованиям по точности и устойчивости рассчитываются координаты точек, по которым асимптотически строится необходима ЛАЧХ всей системы.
На рисунке 4.3 представлена ЛАЧХ объекта управления.
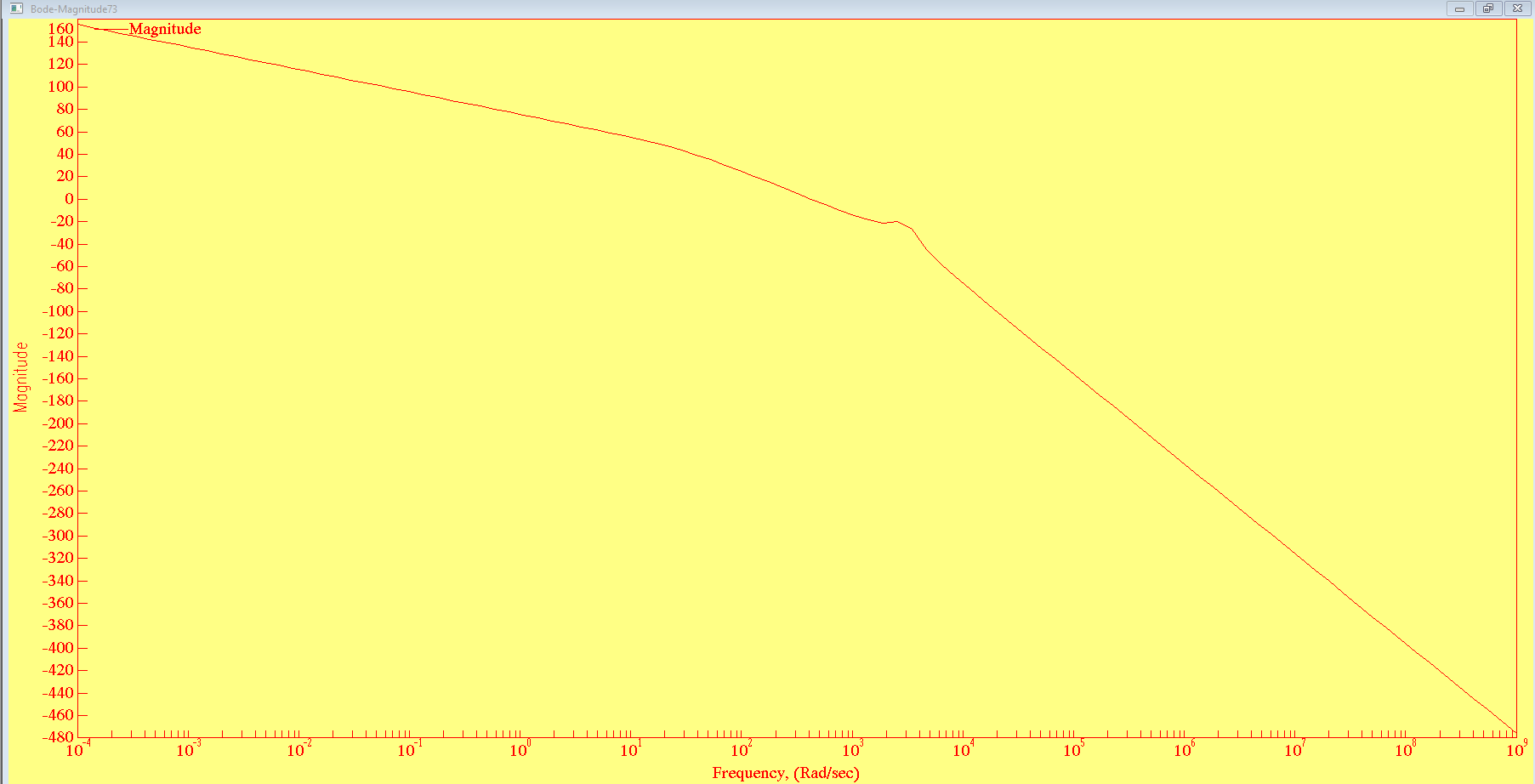
Рисунок 4.3 - ЛАЧХ системы
Построим НЧ запрещенную область на ЛАЧХ.
 ;
;
 .
.
Определим
координаты точки как
как
 ,
,


На рис 4.4 представлена ЛАЧХ с запрещённымы зонами.
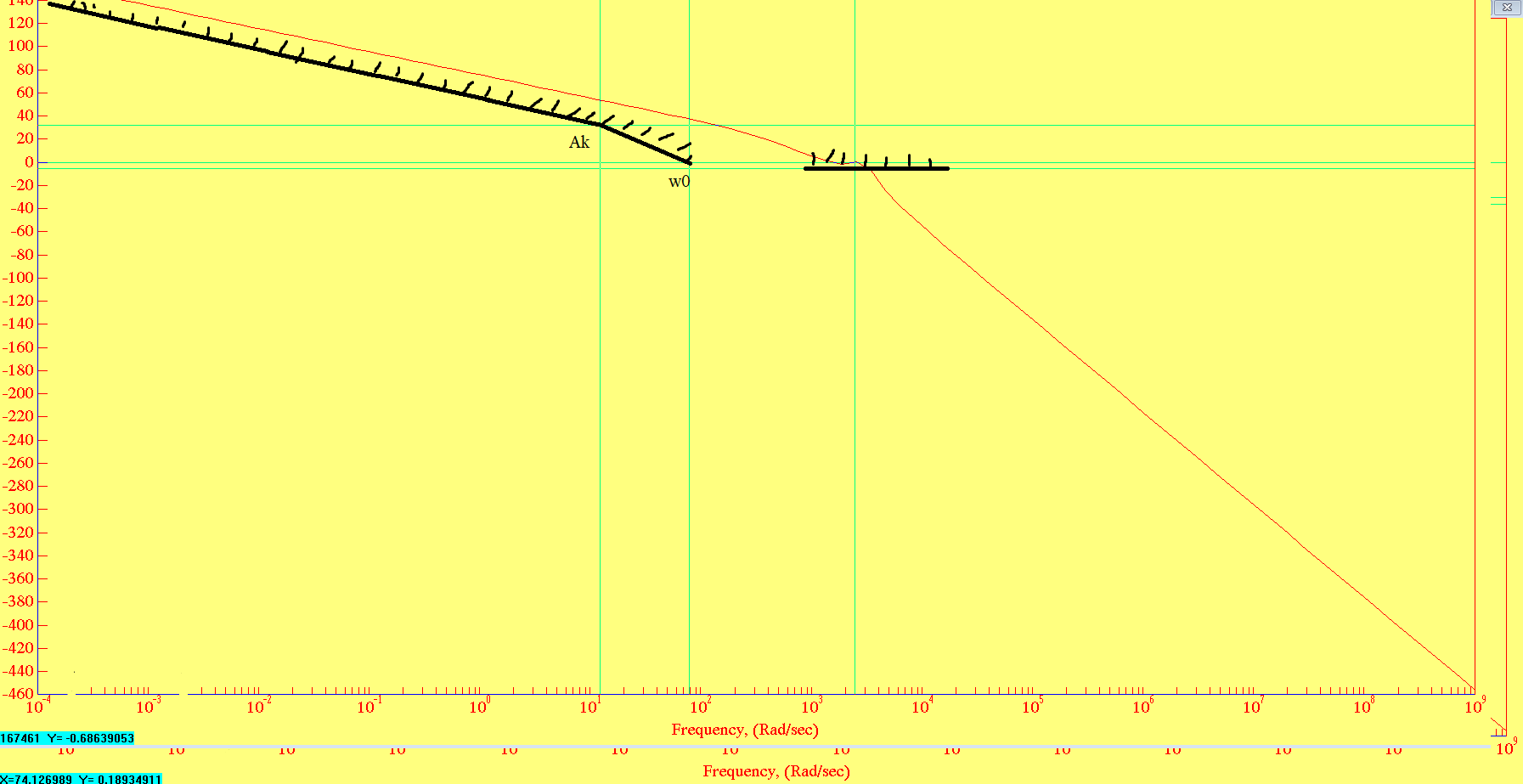
Рисунок 4.4 - ЛАЧХ САР с Запретное НЧ и ВЧ областью
Из рисунка выше видно, что условия по точности для заданной системы не выполнены, так как пик выше точки M, следовательно, необходимо введение корректирующий звеньев.
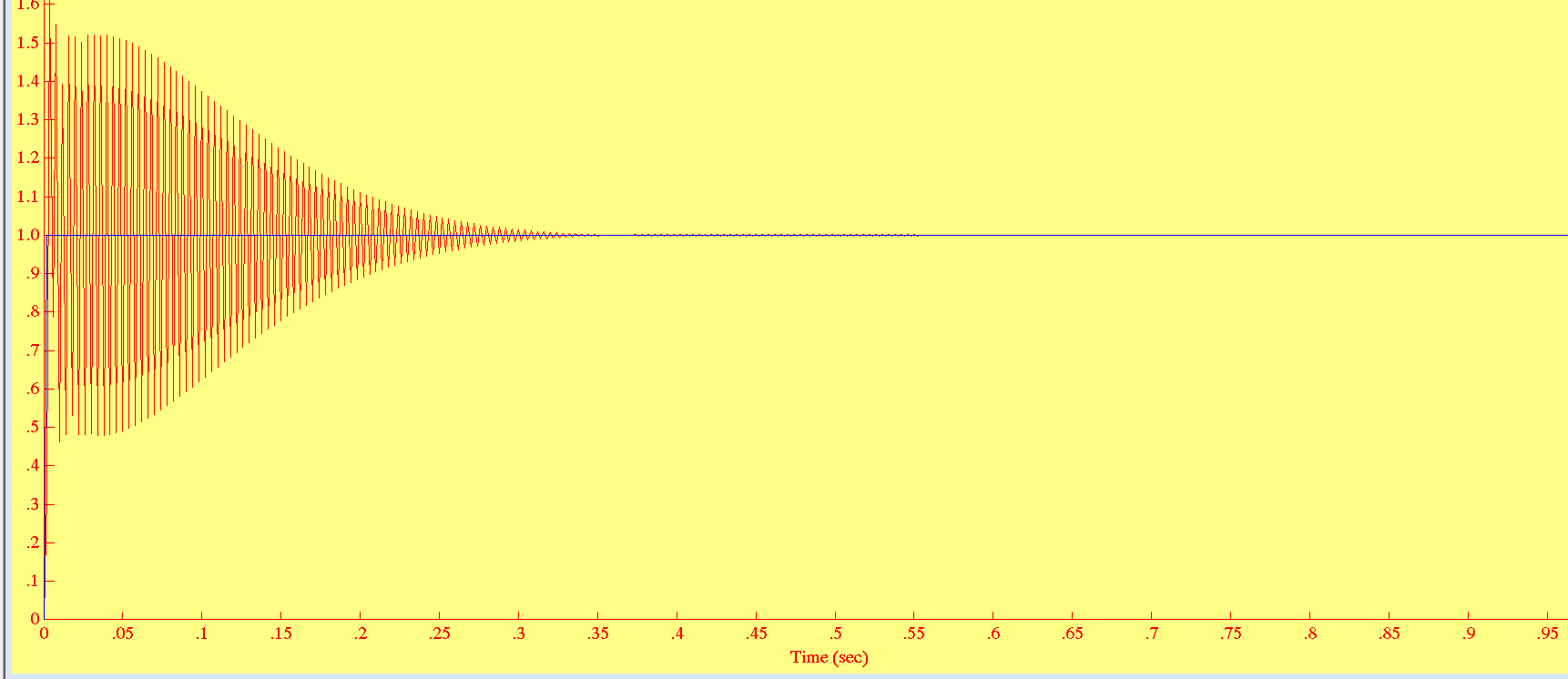
Рисунок 4.5 - ПХ данной системы
4.4 Попытка коррекции блоком из второй лабораторной работы.

Рисунок 4.6 - Модель с подключенным блоком из третей лаб. работы
Как видно из рис. 4.5 коррекция прошло успешно, переходной процесс без значительных колебаний в начале.
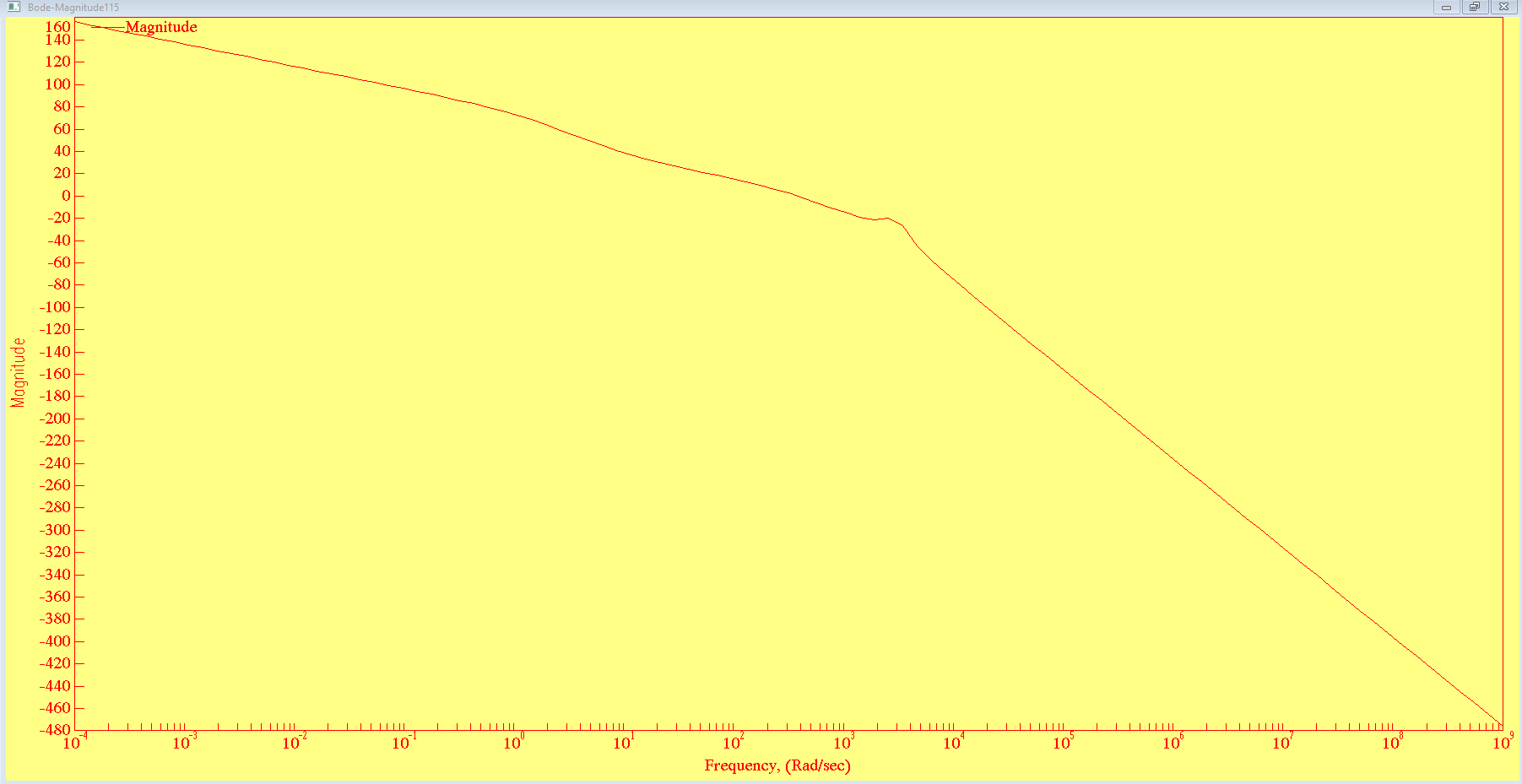
Рисунок 4.6 - ЛАЧХ системы с блоком коррекции из третей лаб. работы
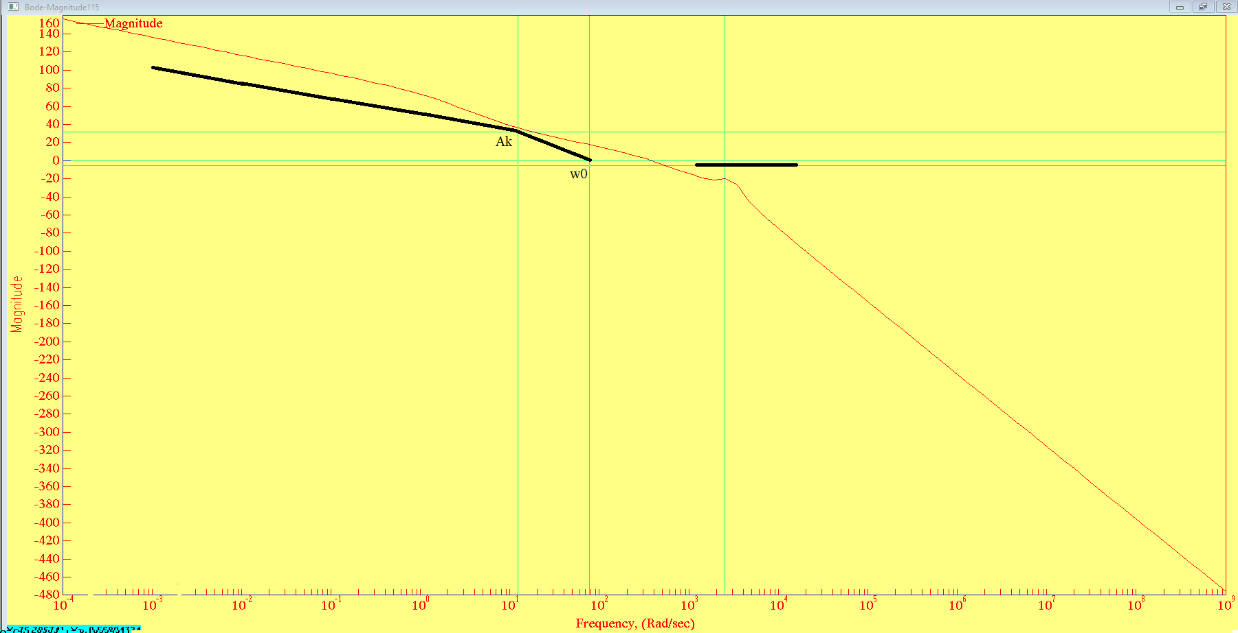
Рисунок 4.7 - ЛАЧХ скорректированной системы с Запретное НЧ и ВЧ областью

Рисунок 4.8 - ПХ скорректированной системы
Как видно из рисунков выше корректировка значительно улучшила ПХ, условия по точности выполнены.
4.5 Попытка математически рассчитать корректирующие звено
Из условий точности и устойчивости получили ПФ регулятора для последовательного звена:

Поскольку в точке wk ЛАЧХ имеет отрицательный наклон, то ПФ низкочастотной части будет выглядеть:

тогда

WПО кор= WНЧ & ВЧ.ж. / [Wрег Wo]
С виду ЛАЧХ определили WНЧ & ВЧ.ж.:

Таким образом получили последовательное корректирующее звено:
WПО
кор=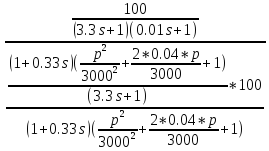

Структурная схема модели с использованием корректирующей звена и подобранными коэффициентами изображена на рисунке 4.9. Переходный процесс приведен на рисунке 4.10.
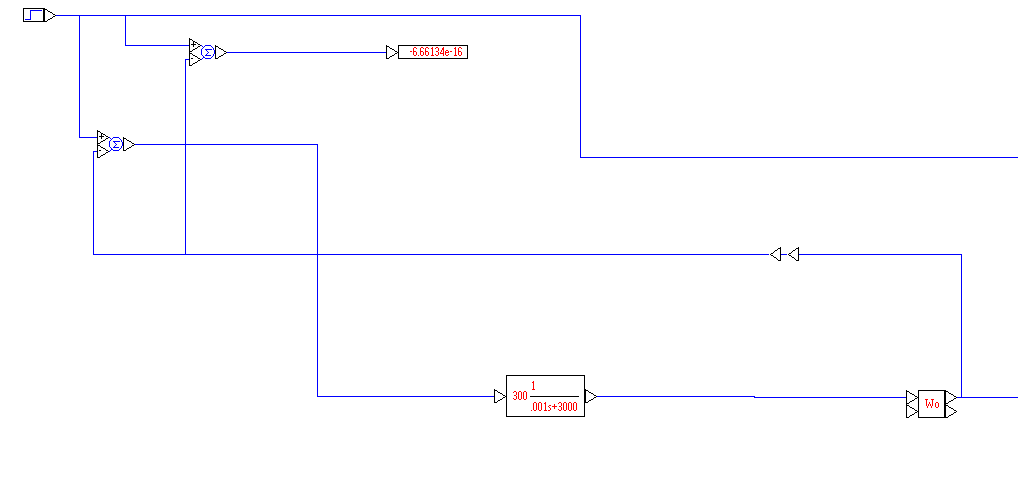
Рисунок 4.9 - Структурная схема скорректированной системы
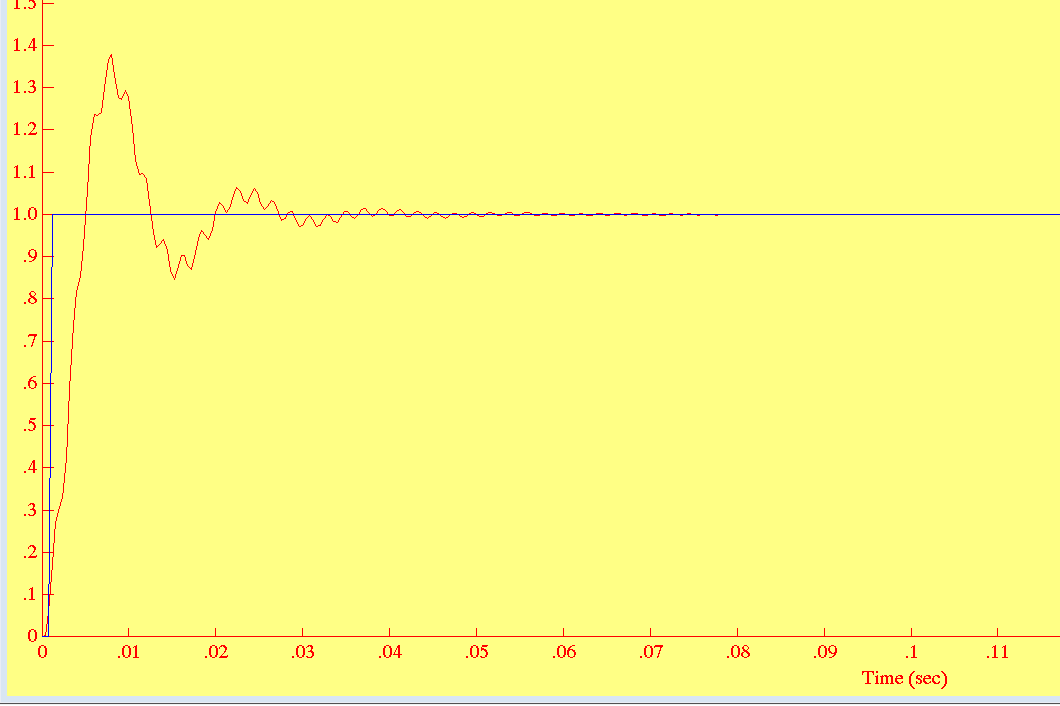
Рисунок 4.10 - Переходный процесс скорректированной системы
ЛАЧХ разомкнутой систем изображений на рисунке 4.11.

Рисунок 4.11 - ЛАЧХ разомкнутой скорректированной системы
Как видно из рисунка 4.11, требования к точности и устойчивости выполнены.
4.6 Исследование качества управления входящей и скорректированной САР
После того, как конфигурировали корректирующих звено, надо исследовать качество управления входящей и скорректированной САР.
структурная схема входной системы изображена на рисунке 4.12.
Переходная характеристика входной системы изображены на рисунке 4.13.
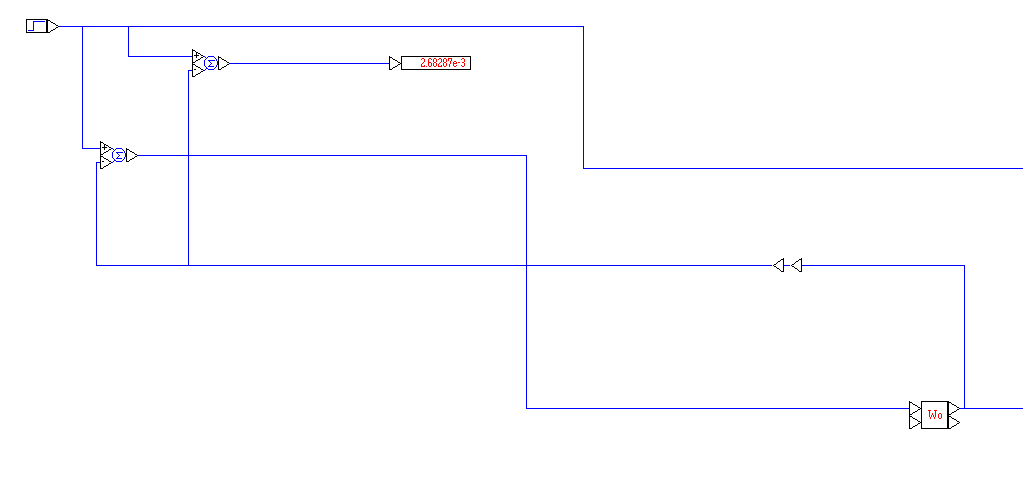
Рисунок 4.12 - Структурная схема входной модели
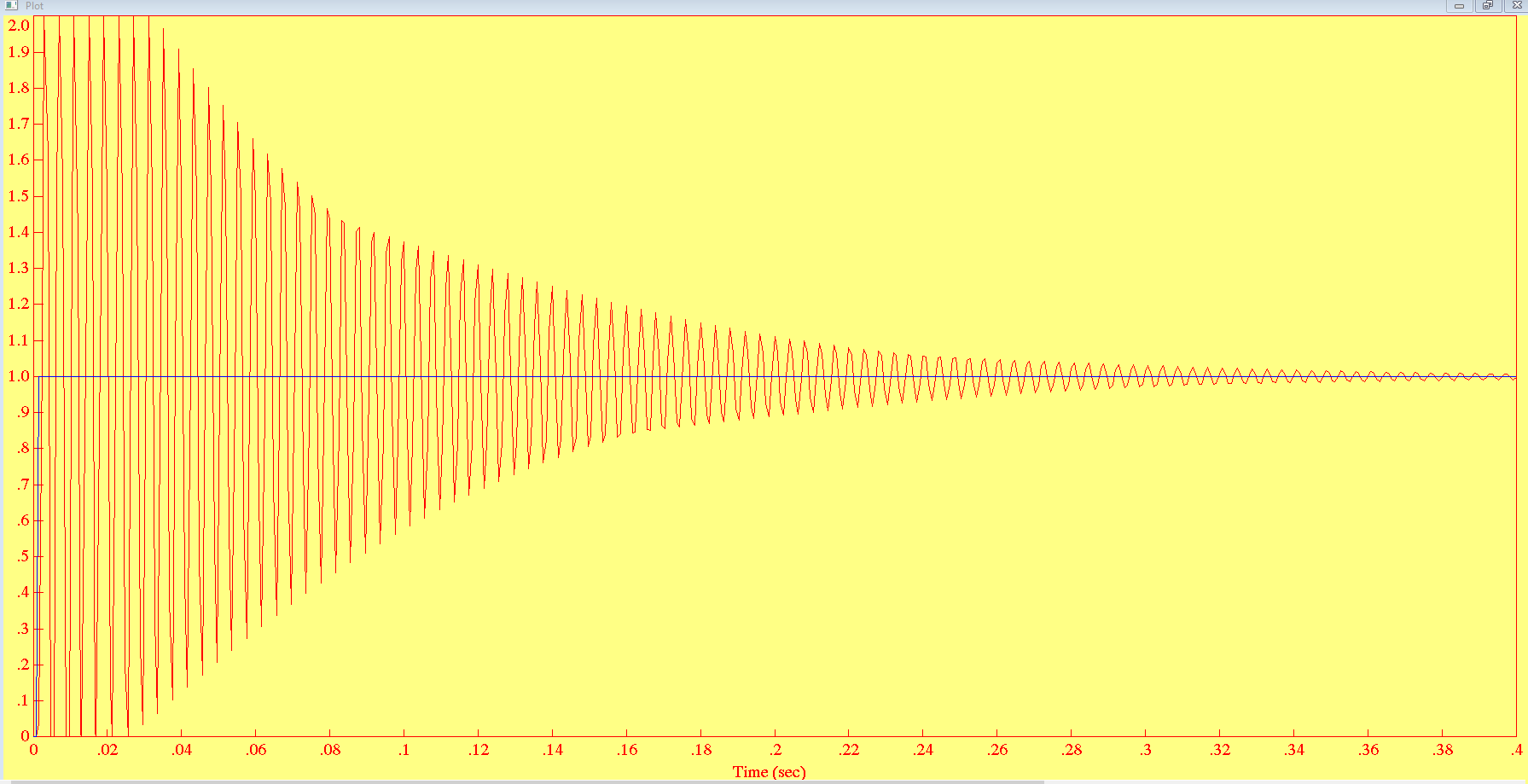
Рисунок 4.13 - Переходная характеристика входной системы
ЛАЧХ и ЛФЧХ входной модели с обозначенными запасами устойчивости изображены на рисунке 4.14.
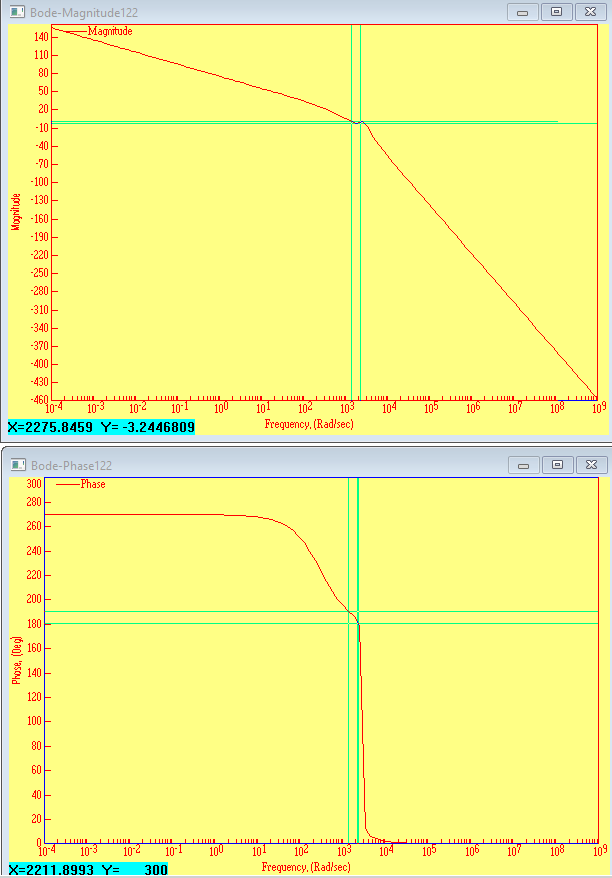
Рисунок 4.14 - ЛАЧХ и ЛФЧХ входной модели с обозначенными запасами устойчивости
По значениям нулей и полюсов (см. Рис. 4.15) определили степень устойчивости ξ и колебательность μ системы автоматического управления по формулам:


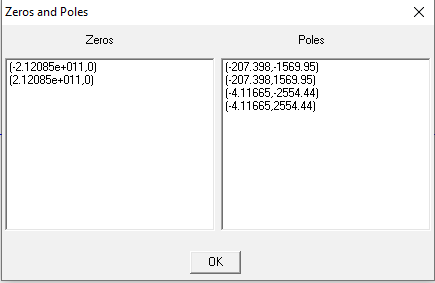
Рисунок 4.54 - Нули и полюсы замкнутой системы
Измеренные параметры оценки качества управления занесены в таблицу 4.2.
Таблица 4.2 - Значения параметров оценки качества управления
|
№ н / п |
Наименование параметра |
Значение для коррекции |
Значение после коррекции |
|
|
запас устойчивости |
||
|
1. |
Запас по амплитуда L (A), dB |
9,83 |
23,046 |
|
2. |
Запас по фазе , Град. |
7 |
30,563 |
|
Частота среза (ω С), рад / с. |
1520 |
364 |
|
|
3. |
Частота полосы пропускания (ωП), рад / с. |
2739 |
450 |
|
|
корневые оценки |
||
|
4. |
Степень устойчивости системы автоматического
управления
|
|
58.0756 |
|
5. |
колебательность системы автоматического
управления
|
|
|
|
|
точность |
||
|
6. |
Ошибка в установленном режиме |
2.68e-3 |
7,116у-11 |
|
|
быстродействие |
||
|
7. |
Время переходного процесса tП (Δ = ± 2%), с. |
0.33 |
0,032 |



ПХ (см. Рисунок 4.15) новой системы изображена на рисунке 4.15.
ЛАЧХ с обозначенными частотами среза и полосы пропускания изображена на рисунке 4.16.

Рисунок 4.15 - Переходный процесс новой системы
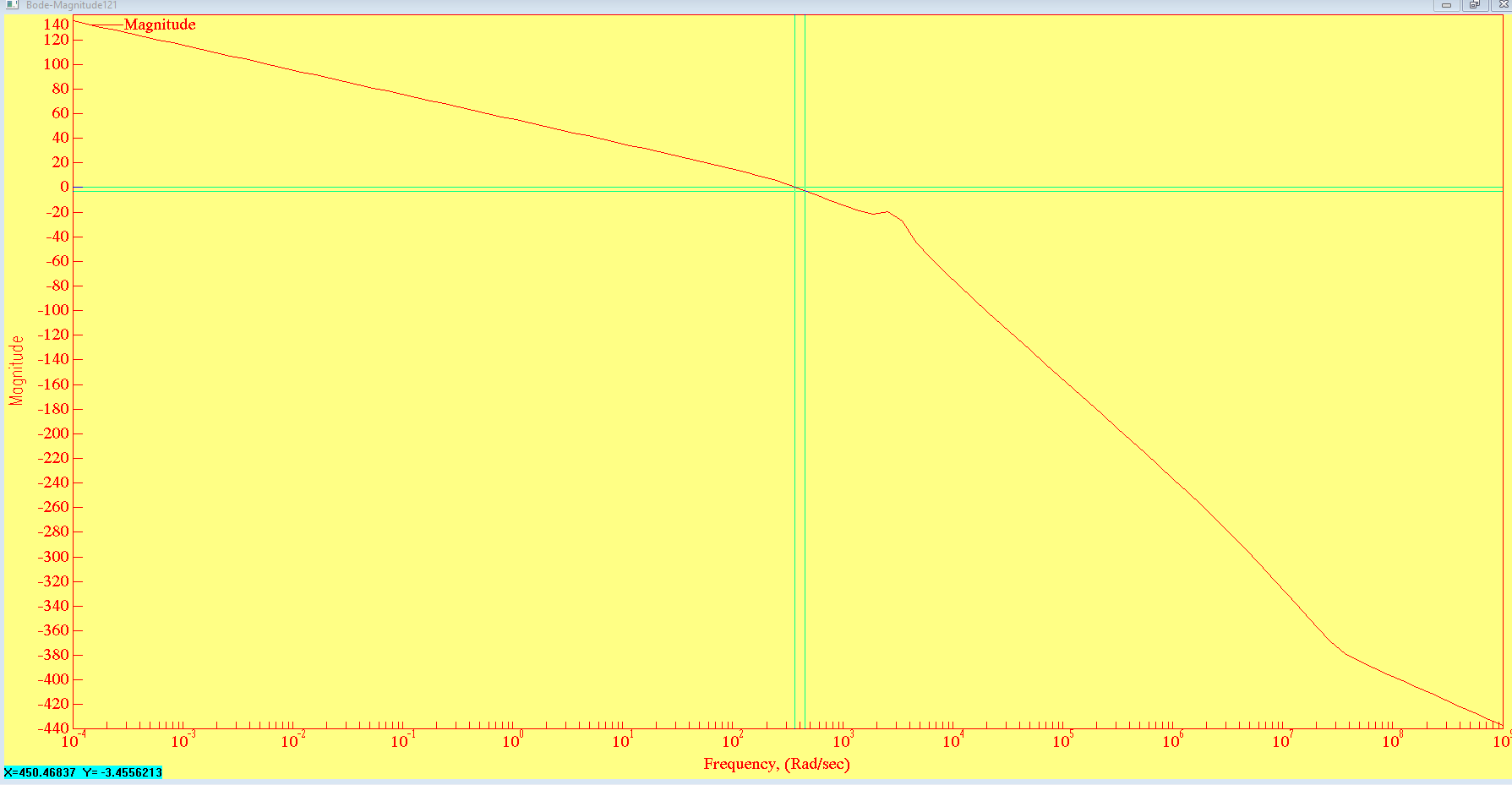
Рисунок 4.16 - Доля ЛАЧХ с обозначенными частотами среза и полосы пропускания
ЛАЧХ и ЛФЧХ с обозначенными запасами устойчивости по амплитуде и фазе изображены на рисунке 4.17.
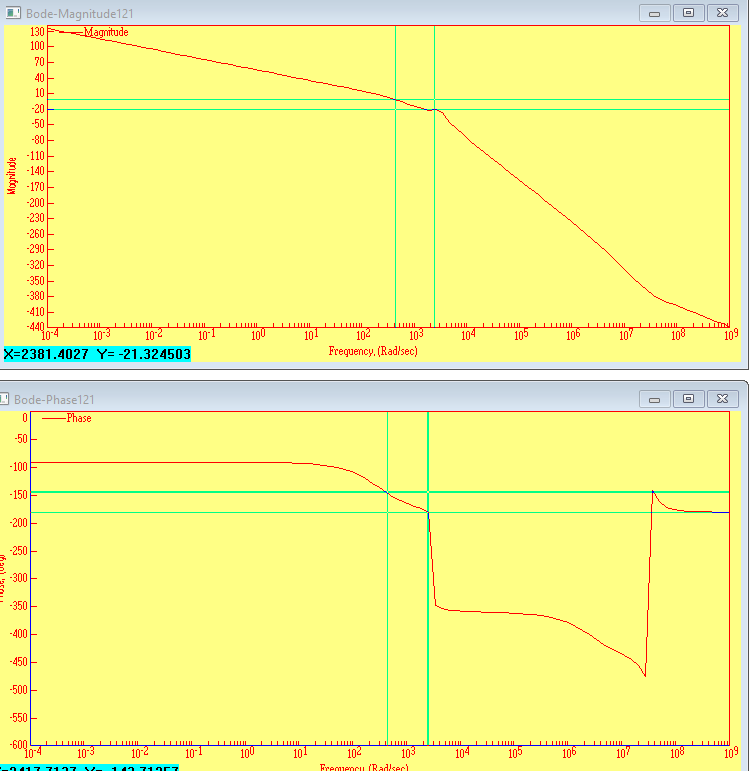
Рисунок 4.17 - ЛАЧХ и ЛФЧХ с обозначенными запасами устойчивости
По значениям нулей и полюсов (см. Рис. 4.18) определили степень устойчивости ξ и колебательность μ системы автоматического управления по формулам:
 58.0756
58.0756

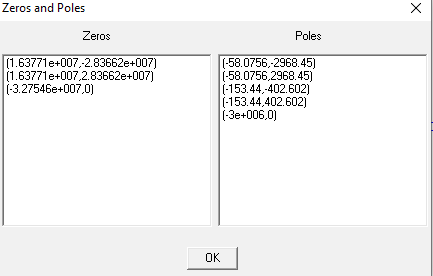
Рисунок 4.18 - Нули и полюсы замкнутой системы
Измеренные параметры оценки качества управления занесены в таблицу 4.2.
ВЫВОДЫ
В ходе выполнения лабораторной работы были исследованы способы синтеза САУ, на основе заданной ПФ и требований к качеству. Была построена ЛАЧХ и указаны запрещенные области заданной ПФ. Было выявлено, что располагаемая система не удовлетворяет заданным требований. Для исправление этого был задействую метод коррекции из лабораторной работы №3, а также математически рассчитано корректирующие звено. Оба метода смогли скорректировать ЛАЧХ, что бы она удовлетворяла заданным требованиям.
Так же во время выполнения лабораторной работы была проведена попытка настроить ПИД-регулятор объекта управления, однако было выявлено, что ПИД-регулятор подходит для конфигурации САР с передаточной функцией не выше второго порядка. В случае с ПФ третьего порядка, почти невозможно его настроить, а тем более получить удовлетворительное качество управления САР.
Регулировка точности вокруг точки Ак связано со значением коэффициента усиления. С одной стороны, он увеличивает амплитуду (высоту) ЛАЧХ разомкнутой системы на низких частотах, а с другой - повышает амплитуду второго пика ЛАЧХ замкнутой системы (на другой резонансной частоте). Так же, как и постоянная времени регулирует амплитуду «скачка» вокруг запрещенной зоны на ВЧ. К сожалению, немного не удалось выполнить требования к точности по ЛАЧХ замкнутой системы.
По всем параметрам модель после корректировки улучшилась.