

3. Динамика материальной точки Задание №3.1. Применение теоремы об изменении кинетической энергии к изучению движения механической системы
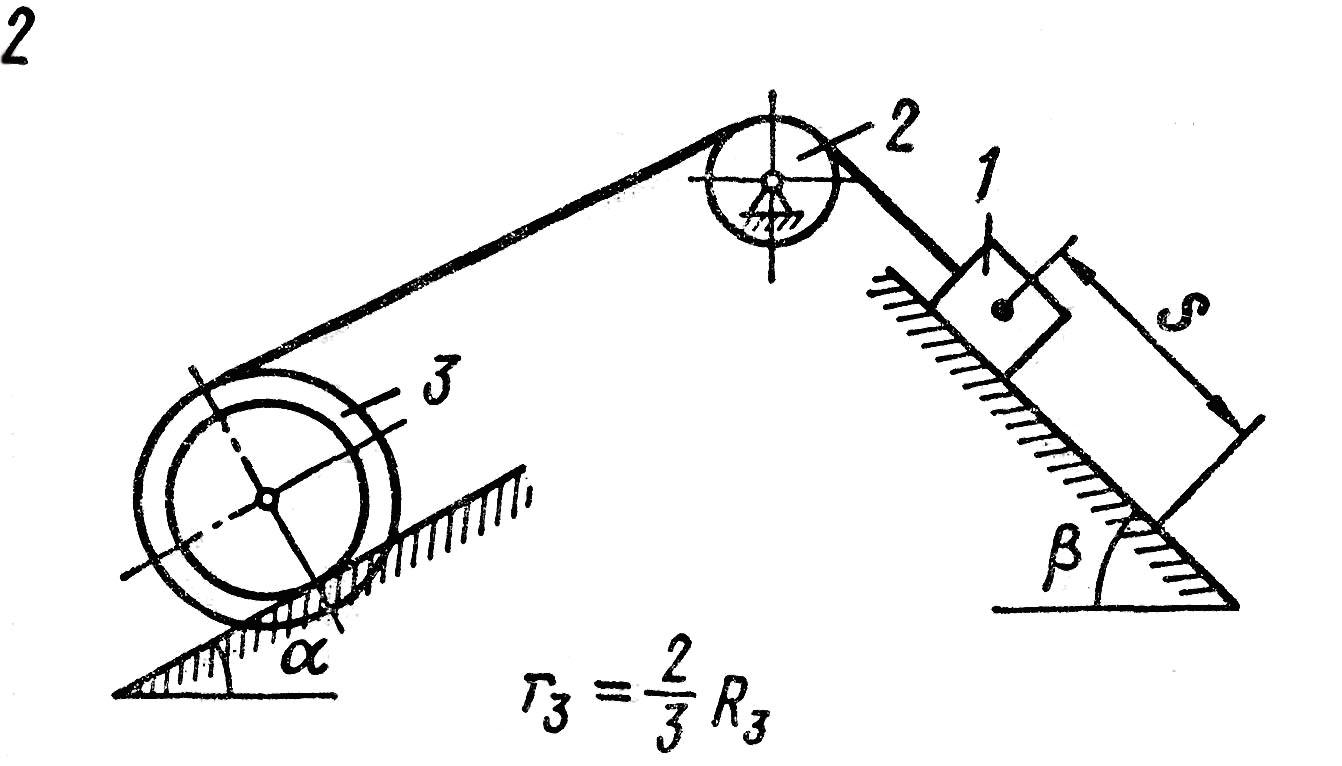
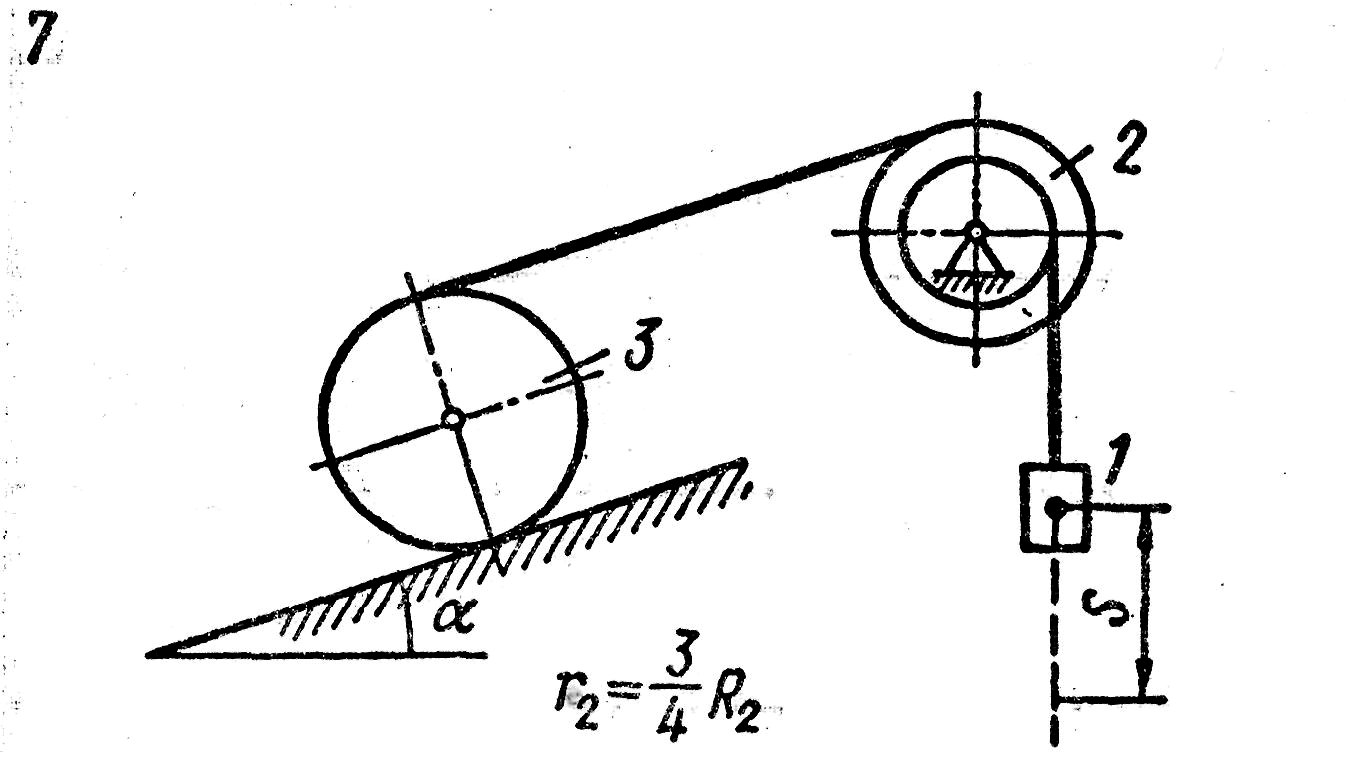
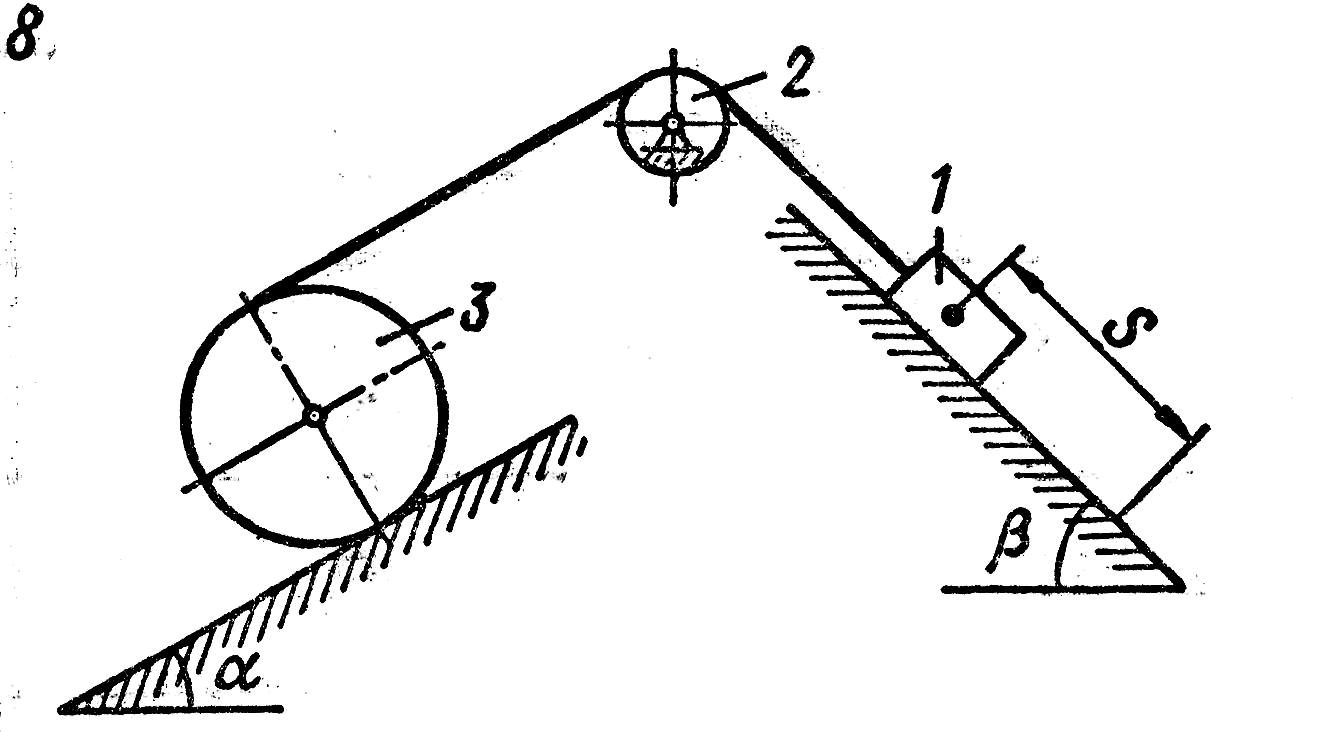
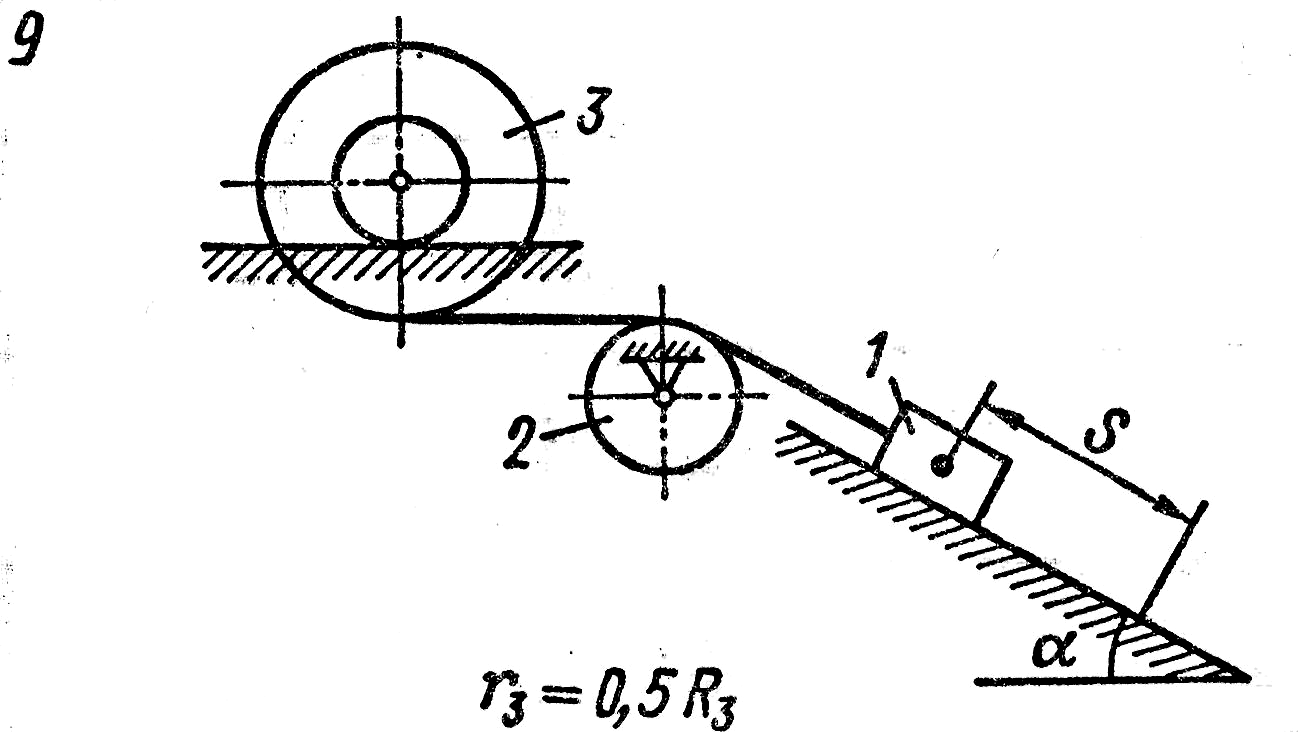
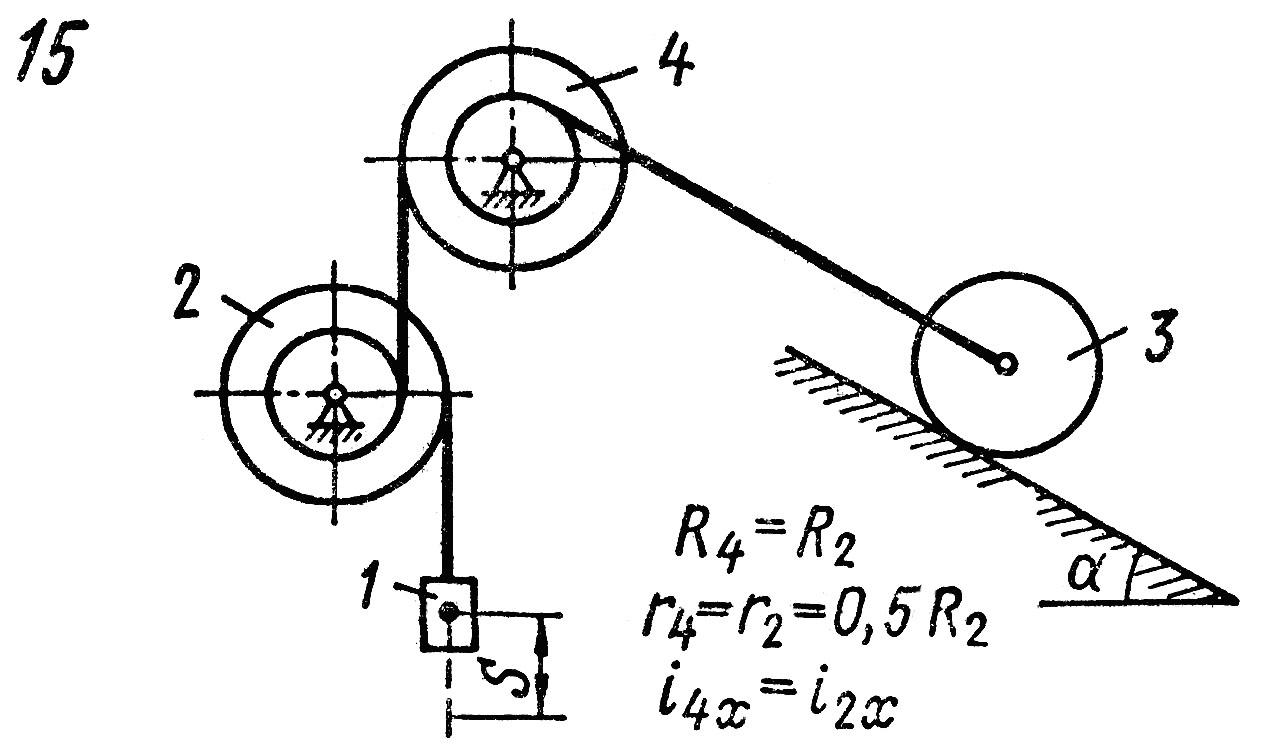
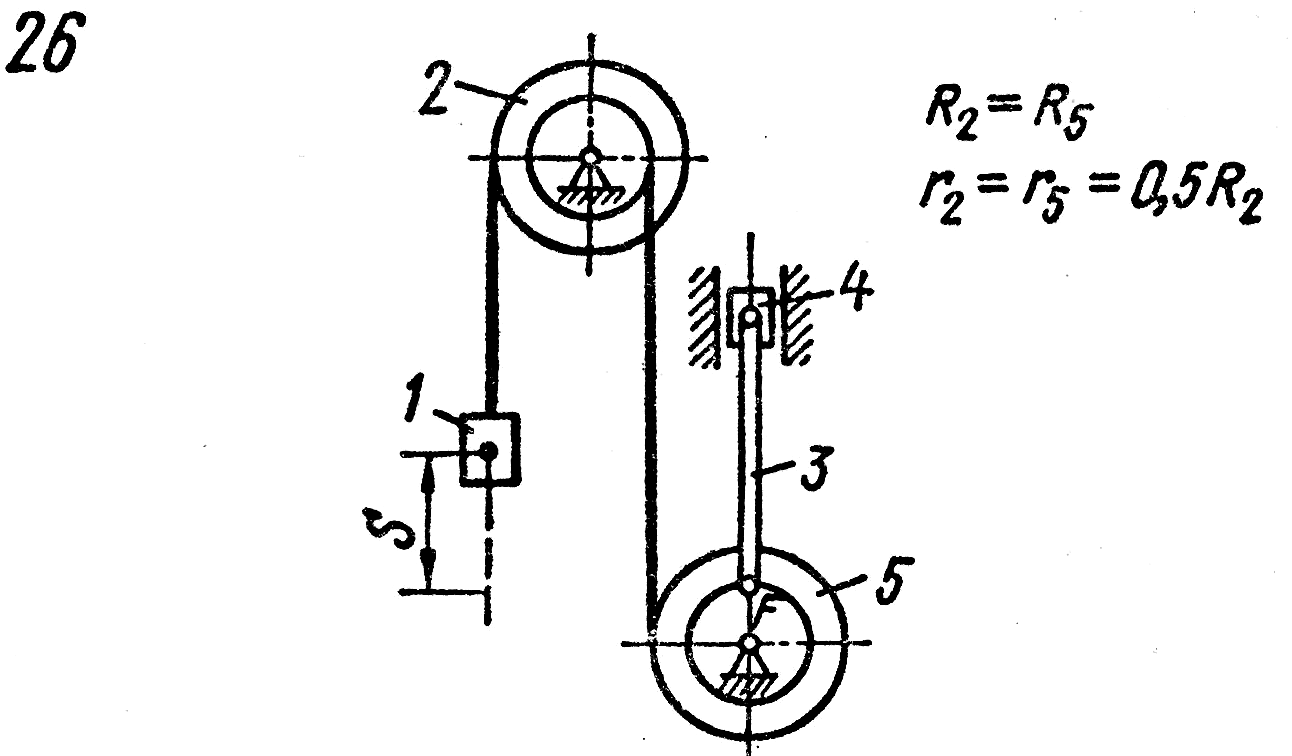
Механическая система под действием сил тяжести приходит в движение из состояния покоя; начальное положение системы показано на рисунках. Учитывая трение скольжения тела 1 (варианты 1–3, 5, 6, 8–12, 17–23, 28–29) и сопротивление качению тела 3, катящегося без скольжения (варианты 2, 4, 6–9, 11, 13–15, 20, 21, 24, 27), пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела 1 в тот момент, когда пройденный им путь станет равным s.
В задании приняты следующие обозначения: т1, т2, т3, m4 – массы тел 1, 2, 3, 4; R2, r2, R3, r3 – радиусы больших и малых окружностей; i2x , i2, – радиусы инерции тел 2 и 3 относительно горизонтальных осей, проходящих через их центры тяжести; , – углы наклона плоскостей к горизонту; f – коэффициент трения скольжения; – коэффициент трения качения.
Необходимые для решения данные приведены в табл. 3.1. Блоки и катки, для которых радиусы инерции в таблице не указаны, считать сплошными однородными цилиндрами.
Наклонные участки нитей параллельны соответствующим наклонным плоскостям.
Таблица 3.1
|
Номер вари-анта |
т1 |
т2 |
т3 |
m4 |
R2 |
R3 |
i2x |
i2, |
|
|
f |
,см |
s,м |
Примечание |
|
кг |
см |
см |
град | |||||||||||
|
1 |
т |
4т |
1/5т |
4/3т |
- |
- |
- |
- |
60 |
- |
0,1 |
- |
2 |
|
|
2 |
т |
1/2т |
1/3т |
- |
- |
30 |
- |
20 |
30 |
45 |
0,22 |
0,2 |
2 |
|
|
3 |
т |
т |
1/10т |
т |
- |
- |
- |
- |
45 |
- |
0,1 |
- |
2 |
|
|
4 |
т |
2т |
40т |
т |
20 |
40 |
18 |
- |
- |
- |
- |
0,3 |
0,1 |
Массами звеньев АВ, ВС и ползуна В пренебречь |
|
5 |
т |
2т |
т |
- |
20 |
15 |
18 |
- |
60 |
- |
0,12 |
- |
0,28 |
Массой водила пренебречь |
|
6 |
т |
3т |
т |
- |
- |
28 |
- |
- |
30 |
45 |
0,1 |
0,28 |
1,5 |
|
|
7 |
т |
2т |
2т |
- |
16 |
25 |
14 |
- |
30 |
- |
- |
0,2 |
2 |
|
|
8 |
т |
1/2т |
1/3т |
- |
- |
30 |
- |
- |
30 |
45 |
0,15 |
0,2 |
1,75 |
|
|
9 |
т |
2т |
9т |
- |
- |
30 |
- |
20 |
30 |
- |
0,12 |
0,25 |
1,5 |
|
|
10 |
т |
1/4т |
1/4т |
1/5т |
- |
- |
- |
- |
60 |
- |
0,1 |
- |
3 |
|
|
11 |
т |
1/2т |
1/4т |
- |
- |
30 |
- |
25 |
30 |
45 |
0,17 |
0,2 |
2,5 |
|
|
12 |
т |
1/2т |
1/5т |
т |
30 |
- |
20 |
- |
30 |
- |
0,2 |
- |
2,5 |
|
|
13 |
т |
2т |
5т |
2т |
30 |
20 |
26 |
- |
30 |
- |
- |
0,24 |
2 |
|
|
14 |
т |
1/2т |
5т |
4т |
- |
25 |
- |
- |
- |
- |
- |
0,2 |
2 |
Массы каждого из четырех колесодинаковы |
|
15 |
т |
1/2т |
4т |
1/2т |
20 |
12 |
18 |
- |
60 |
- |
- |
0,25 |
1,5 |
|
|
16 |
т |
1/10т |
1/10т |
1/10т |
10 |
15 |
- |
- |
- |
- |
- |
- |
0,05 |
Массой водила пренебречь |
|
17 |
т |
1/4т |
1/5т |
1/10т |
20 |
- |
15 |
- |
60 |
- |
0,1 |
- |
0,16 |
Шатун 3 рассматривать как тонкийоднородный стержень |
|
18 |
т |
3т |
т |
- |
35 |
15 |
32 |
- |
60 |
- |
0,15 |
- |
0,2 |
Массой водила пренебречь |
|
19 |
т |
1/3т |
1/10т |
т |
24 |
- |
20 |
- |
60 |
- |
0,15 |
- |
1,5 |
|
|
20 |
т |
2т |
20т |
- |
20 |
15 |
16 |
- |
30 |
- |
0,1 |
0,2 |
0,2 |
Массами звеньев АВ, ВС и ползуна В пренебречь |
|
21 |
т |
т |
2т |
- |
20 |
20 |
16 |
- |
30 |
45 |
0,2 |
0,32 |
1,2 |
|
|
22 |
т |
1/2т |
1/4т |
- |
20 |
10 |
- |
- |
60 |
- |
0,17 |
- |
0,1 |
Массой водила пренебречь |
|
23 |
т |
т |
1/10т |
4/5т |
20 |
- |
18 |
- |
30 |
- |
0,1 |
- |
1 |
|
|
24 |
т |
3т |
20т |
- |
20 |
30 |
18 |
- |
- |
- |
- |
0,6 |
0,08 |
Массами звеньев АВ, ВС и ползуна В пренебречь |
|
25 |
т |
1/3т |
1/4т |
- |
16 |
20 |
- |
- |
- |
- |
- |
- |
0,04 |
Массой водила пренебречь |
|
26 |
т |
1/2т |
т |
1/3т |
30 |
- |
20 |
- |
- |
- |
- |
- |
0,6 |
Массы и моменты инерции блоков 2 и 5 одинаковы. Шатун 3 рассматривать как тонкийоднородный стержень |
|
27 |
т |
т |
6т |
1/2т |
20 |
20 |
16 |
- |
30 |
- |
- |
0,2 |
2 |
|
|
28 |
т |
2т |
3т |
- |
20 |
- |
14 |
- |
60 |
- |
0,1 |
- |
0,1 |
Шатун 3 рассматривать как тонкийоднородный стержень |
|
29 |
т |
1/2т |
3/10т |
3/2т |
26 |
20 |
20 |
18 |
30 |
- |
0,12 |
- |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|























Пример выполнения задания
Дано:
![]() – масса груза1,
– масса груза1,
![]() ,
,![]() ,
,![]() м,
м,![]() ,
,![]() ,
,![]() ,
,![]() см,
см,![]() м. На рис. 15 показана механическая схема
в начальном положении.
м. На рис. 15 показана механическая схема
в начальном положении.
Найти:
![]() – скорость груза1
в конечном положении.
– скорость груза1
в конечном положении.
Решение. Применим теорему об изменении кинетической энергии системы:
![]() (3.1)
(3.1)
где Т0
и Т
– кинетическая энергия системы в
начальном и конечном положениях;
![]()
сумма работ внешних сил, приложенных к
системе, на перемещение системы из
начального положения в конечное;
сумма работ внешних сил, приложенных к
системе, на перемещение системы из
начального положения в конечное;
![]()
сумма работ внутренних сил системы на
том же перемещении.
сумма работ внутренних сил системы на
том же перемещении.
Для рассматриваемых систем, состоящих из абсолютно твёрдых тел, соединенных нерастяжимыми нитями и стержнями,
![]()
Так как в начальном положении система находится в покое, то Т0 = 0.
 Следовательно,
уравнение (3.1) принимает вид
Следовательно,
уравнение (3.1) принимает вид
![]() (3.2)
(3.2)
Напишем кинематические соотношения между скоростями и перемещениями точек системы, т. е. уравнения связей, при этом перемещения и скорости тел выразим соответственно через скорости и перемещения груза 1.
Скорость центра масс катка 3 равна скорости груза 1:
![]() . (3.3)
. (3.3)
Угловая скорость катка 3, мгновенный центр скоростей которого находится в точке касания катка с плоскостью
![]() .
(3.4)
.
(3.4)
Угловая скорость блока 2
![]() .
(3.5)
.
(3.5)
Вычислим кинетическую энергию системы в конечном положении как алгебраическую сумму кинетических энергий тел 1, 2, 3:
![]() .
(3.6)
.
(3.6)
Кинетическая энергия груза 1, движущегося поступательно,
![]() .
(3.7)
.
(3.7)
Кинетическая энергия блока 2, вращающегося вокруг оси Ax:
![]() .
(3.8)
.
(3.8)
Момент инерции блока 2 относительно оси Ax:
![]() .
(3.9)
.
(3.9)
Подставляя выражения (3.5), (3.9) в формулу (3.8), получаем
![]() .
.
Кинетическая энергия катка 3, совершающего плоское движение:
![]() ,
(3.10)
,
(3.10)
где
![]()
момент инерции катка 3 относительно его
продольной центральной оси
момент инерции катка 3 относительно его
продольной центральной оси
![]() :
:
![]() .
(3.11)
.
(3.11)
Подставляя (3.3), (3.4), (3.11) в формулу (3.10), получаем
![]() .
(3.12)
.
(3.12)
Кинетическая энергия всей системы:
![]() .
(3.13)
.
(3.13)
Н айдём
сумму работ всех внешних сил, приложенных
к системе на заданном ее перемещении.
Покажем внешние силы, приложенные к
системе (рис. 3.6):
айдём
сумму работ всех внешних сил, приложенных
к системе на заданном ее перемещении.
Покажем внешние силы, приложенные к
системе (рис. 3.6):
для тела 1:
Работа сил тяжести G1 :
![]() (3.14)
(3.14)
Работа силы трения скольжения Fтр:
![]() .
.
Так как
![]() ,
,
то
![]()
![]() .
(3.15)
.
(3.15)
для катка 3:
Работа силы тяжести G3 будет отрицательной, т.к. начальное положение катка выше, чем конечное
![]() .
(3.16)
.
(3.16)
Работа силы
сцепления катка
![]() ,
т.к. сила приложена в мгновенном центре
скоростей катка.
,
т.к. сила приложена в мгновенном центре
скоростей катка.
Работа пары сил сопротивления качению катка 3:
![]()
где
![]()
момент пары сил сопротивления качению
катка 3;
момент пары сил сопротивления качению
катка 3;
![]()
угол поворота катка 3.
угол поворота катка 3.
Так как каток катится без скольжения, то угол его поворота
![]()
где SC3 – перемещение центра тяжести С3 катка 3.
В нашем случае перемещение центра масс катка 3 будет равно перемещению центра масс груза 1, т.е. SC3 = S = 2,4 м.
Тогда работа пары сил сопротивления качению:
![]() (3.17)
(3.17)
Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (14) – (17):

Согласно теореме
(3.2), приравниваем значения
![]() и
и![]()
![]() ,
,
откуда
![]() .
.
Библиографический список
1. Тарг С.М. Краткий курс теоретической механики. – М.: Высшая школа, 1995. – 415 с.
2. Яблонский А.А. Курс теоретической механики. – М.: Высшая школа, 1971. – Ч. 1. – 275 с.
3. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. – М.: Наука, 1971. – Ч. 1. – 460 с.
4. Добронравов В.В., Никитин Н.Н. Курс теоретической механики. – М.: Высшая школа, 1983. – 532 с.
5. Сборник заданий для курсовых работ по теоретической механике. Учеб. пособие для вузов./ Под ред. А.А. Яблонского и др. – М.: Высшая школа, 1985. – 367 с.
6. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. – М.: Физматгиз, 1961. – Ч.1. – 457 с.
7. Мещерский Н.В. Сборник задач по теоретической механике. – М.: Наука, 1971. – 450 с.
8. Силков М.В. Кинематика. Методические указания. – ОмГТУ, 2004.