

Задание 2.2. Сложное движение точки. Определение абсолютной скорости и абсолютного ускорения точки
Точка M движется относительно тела D. По заданным уравнениям относительного движения точки M и движения тела D определить для момента времени t=t1 абсолютную скорость и абсолютное ускорение точки M.
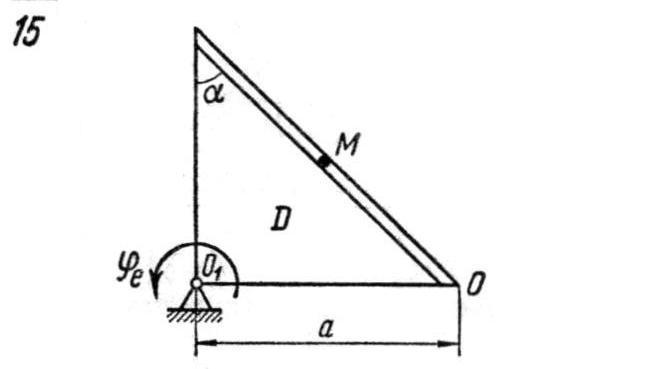
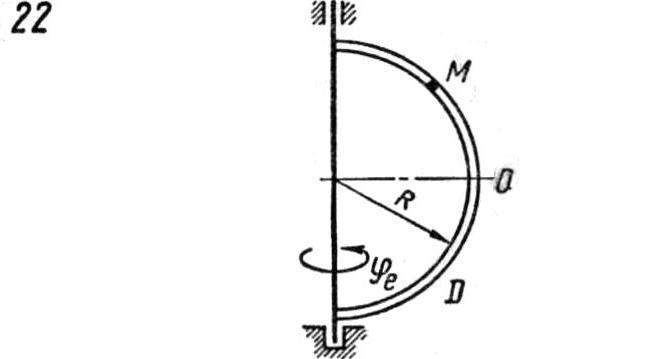
Схемы механизмов показаны на рис. 1–29, а необходимые для расчета данные помещены в табл. 2.3.
Таблица 2.3
|
Номер вари- анта (рис. 1–28) |
Уравнение отно-сительного дви-жения точки MOM=sr=sr(t), см |
Уравнение движения тела |
|
|
|
|
Доп. данные | |
|
|
| |||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
1 |
|
|
- |
|
- |
25 |
- |
|
|
2 |
|
|
- |
|
20 |
- |
- |
|
|
3 |
|
|
- |
2 |
- |
30 |
- |
|
|
4 |
|
|
- |
1 |
- |
- |
60 |
|
|
5 |
|
|
- |
2 |
30 |
- |
- |
|
|
6 |
- |
- |
|
|
15 |
- |
- |
|
|
7 |
|
|
- |
|
- |
40 |
60 |
|
|
8 |
|
|
- |
2 |
- |
- |
30 |
|
|
9 |
|
|
- |
|
- |
- |
- |
|
|
10 |
|
|
- |
|
20 |
20 |
- |
|
|
11 |
|
|
- |
4 |
- |
25 |
- |
|
|
12 |
|
|
- |
2 |
30 |
30 |
- |
|
|
13 |
|
|
- |
|
40 |
- |
- |
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
14 |
|
|
- |
|
- |
- |
30 |
|
|
15 |
|
|
- |
2 |
- |
60 |
45 |
|
|
16 |
|
|
- |
|
- |
20 |
- |
|
|
17 |
|
|
- |
1 |
- |
|
- |
|
|
18 |
|
|
- |
2 |
- |
- |
60 |
|
|
19 |
|
|
- |
2 |
40 |
- |
- |
|
|
20 |
|
|
- |
3 |
60 |
- |
- |
|
|
21 |
|
|
- |
|
25 |
- |
- |
|
|
22 |
|
|
- |
|
30 |
- |
- |
|
|
23 |
|
- |
- |
1 |
18 |
- |
- |
|
|
24 |
|
|
- |
1 |
30 |
- |
- |
|
|
25 |
|
|
- |
5 |
- |
- |
- |
|
|
26 |
|
|
- |
|
- |
- |
45 |
|
|
27 |
- |
- |
|
2 |
75 |
- |
- |
|
|
28 |
|
|
- |
2 |
40 |
- |
- |
|
|
29 |
|
- |
|
2 |
48 |
- |
- |
|
Примечания. Для каждого варианта положение точки M на схеме соответствует положительному значению sr; в вариантах 5, 10, 12, 13, 2024, 2829 OM = sr – дуга окружности; на схемах 5, 10, 12, 21, 24 OM – дуга, соответствующая меньшему центральному углу. Относительное движение точки M в вариантах 6 и 27 и движение тела D в варианте 23 определяются уравнениями, приведенными в последнем столбце табл. 2.3.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


























Пример выполнения задания
Дано:
схема механизма (рис. 2.7),
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Н айти:
абсолютные скорость и ускорение
айти:
абсолютные скорость и ускорение
![]() точки М.
точки М.
Решение. Будем
считать, что в заданный момент времени
плоскость чертежа совпадает с плоскостью
Д.
Положение точки M
на теле Д
определяется расстоянием
![]() .
.
При
![]() ,
,
![]()
Угол
![]() вычисляется из длины дугиОМ
вычисляется из длины дугиОМ
![]() ,
,
откуда находим значение угла
![]() .
.
Абсолютную скорость точки M найдем как геометрическую сумму относительной и переносной скоростей:
![]() .
.
Модуль относительной скорости
![]() ,
,
где
![]() .
.
При t = 2 с
![]() ,
,
![]() .
.
Положительный
знак у
![]() показывает, что вектор
показывает, что вектор![]() направлен в сторону возрастания
направлен в сторону возрастания![]() .
.
Модуль переносной скорости
![]() ,
(2.1)
,
(2.1)
где точка M, как и AO участвует в поступательном движении тела Д (т.е. AO всегда параллельна самой себе).
![]() .
.
При t = 2 c
![]() .
.
Н аправление
аправление![]() совпадает с направлением отсчета угла
совпадает с направлением отсчета угла![]() ,
следовательно, вектор
,
следовательно, вектор![]() направлен перпендикулярно плоскости
чертежа от нас.
направлен перпендикулярно плоскости
чертежа от нас.
Тогда, согласно формуле (2.1) модуль переносной скорости:
![]() .
.
Вектор
![]() направлен по касательной к окружностиO2A
в сторону вращения тела Д.
В момент времени t
= 2 c
положение тела Д
таково, что значение угла
направлен по касательной к окружностиO2A
в сторону вращения тела Д.
В момент времени t
= 2 c
положение тела Д
таково, что значение угла
![]() составляет
составляет![]() рад. Следовательно, вектор
рад. Следовательно, вектор![]() направлен вертикально вниз (рис. 2.8). Так
как вектор
направлен вертикально вниз (рис. 2.8). Так
как вектор![]() не перпендикулярен вектору
не перпендикулярен вектору![]() ,
то для нахождения модуля абсолютной
скорости используем теорему косинусов:
,
то для нахождения модуля абсолютной
скорости используем теорему косинусов:
![]()
Абсолютное ускорение точки M равно геометрической сумме относительного, переносного и кориолисова ускорений:
![]()
или в развернутом виде
![]()
Модуль относительного касательного ускорения
![]() ,
,
![]() .
.
Приt = 2 c
![]() .
.
Знаки
![]() и
и![]() одинаковы, следовательно, относительное
движение точкиМ
ускоренное.
одинаковы, следовательно, относительное
движение точкиМ
ускоренное.
Относительное нормальное ускорение
![]() .
.
Угловое переносное ускорение находим как
![]() .
.
Приt = 2 c
![]()
Модуль переносного центростремительного ускорения
![]() ,
,
а модуль переносного вращательного ускорения
![]() .
.
При t = 2 c
![]() ,
,
![]() .
.
Модуль кориолисова ускорения
![]() .
.
Так как вектор
![]() направлен перпендикулярно плоскости
чертежа от нас, то угол между направлениями
векторов
направлен перпендикулярно плоскости
чертежа от нас, то угол между направлениями
векторов![]() и
и
![]() равен
равен![]() ,
и тогда
,
и тогда

![]() .
.
Покажем направление
ускорений точки M
в момент времени
![]() (рис. 2.9). Вектор
(рис. 2.9). Вектор![]() направлен по правилу векторного
произведения вдоль направленияMА.
направлен по правилу векторного
произведения вдоль направленияMА.
Модуль абсолютного ускорения точки М находим способом проекций:
![]() ,
,
![]() ,
,
![]() .
.
После вычисления получаем:
![]()