


Приднестровский государственный университет
им. Т.Г. Шевченко
Инженерно-технический институт
Пояснительная записка к курсовому проекту
По предмету: «Теория механизмов и машин»
На тему: «Рычажный механизм»
Выполнил: студент гр.13КТ1
Талпа Л.В.
Проверил: старший преподаватель
Руденко Л.Н.
Тирасполь 2015 г.
Синтез и кинематическое исследование рычажного механизма
1.1 Проводим структурный анализ и определяем класс механизма
Число степеней свободы механизма определяем по формуле ПА Чебышева:
W=3n-2P5
где W-степень подвижности механизма,
n-число подвижных звеньев, n=5;
Р5-количество вращательных и поступательных пар пятого класса, имеющихся в данном механизме, Р5=7.
W=35-27=1
Разбиваем механизм на группы Ассура, начиная с выходных звеньев. Последовательно отделяем от механизма группы Ассура второго класса (рис 1).
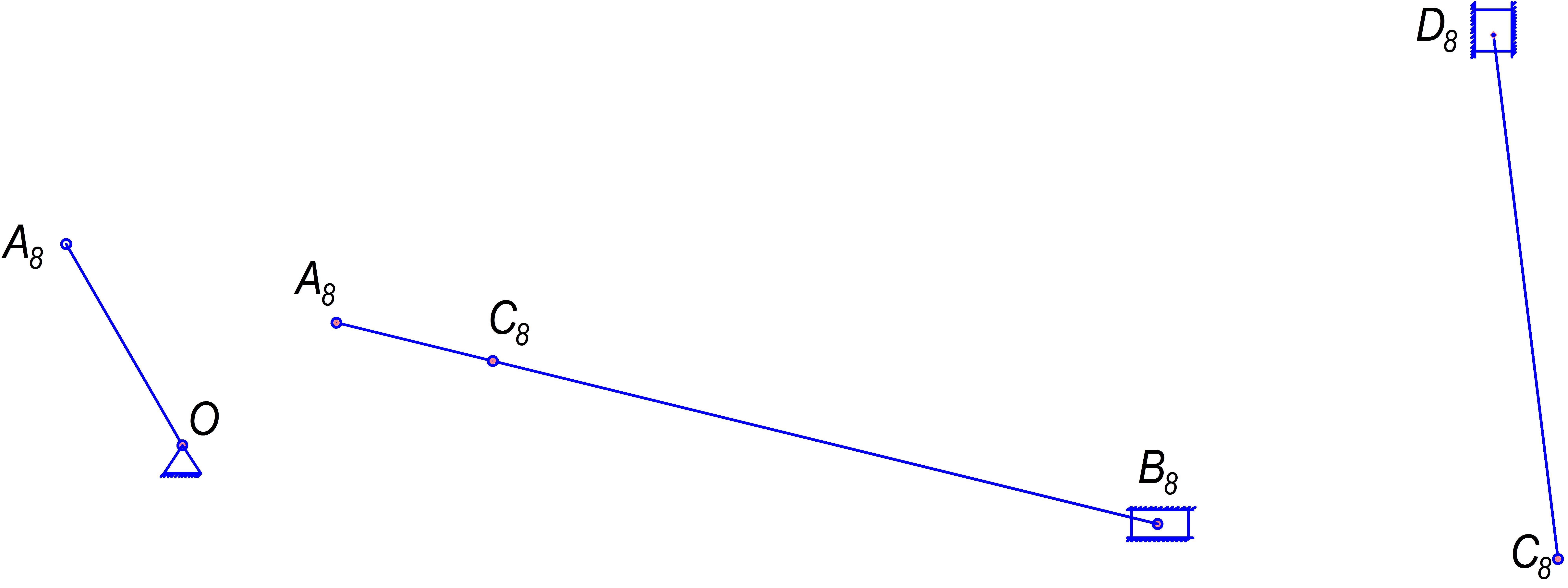
Рисунок 1 - Разложение механизма на группы
Около каждой группы указываем класс, порядок и ее вид, а в скобках проставляем номера звеньев, образующих данную группу.
В результате осталось одно входное звено. Формула строения механизма имеет вид:
1(0,1)2(2,3)2(4,5)
Она означает, что к входному звену, состоящему из стойки и ведущего звена 1, присоединяется структурная группа второго класса, второго порядка, состоящая из звеньев 2, 3, а затем к ней присоединяется структурная группа второго класса, второго порядка, состоящая из звеньев 4, 5. По классификации Ассура механизм принадлежит к механизмам второго класса.
Строим кинематическую схему механизма.
Для этого определяем масштаб длин, задавшись длиной отрезка (О1А)=50мм:
![]()
где l-масштаб длин, м/мм;
lO1A-длина звена ОА, м;
(ОА)-длина звена ОА на схеме механизма, мм.
l=0.11/50=0.0022 м/мм.
Тогда длины остальных отрезков будут равны:
(АВ)=lАB/l =0.4/0.0022=181,9 мм;
(АС)=lАC/l=0.088/0.0022=40 мм;
(СD)=lCD/l=0.050/0.0022=113.6 мм;
(AS2)=lAS2/l=0.15/0.0022=68.1 мм;
(CS4)=lCS4/l=0.12/0.0022=54.5 мм;
По полученным размерам строим кинематическую схему механизма и производим разметку траекторий точек для 12 положений входного звена.
1.3 Строим план скоростей механизма.
Угловая скорость звена 1 будет равна:
![]()
где n-частота вращения кривошипа, n=330 об/мин;
1- угловая скорость звена 1, рад/с.
![]()
VА=1 lО1 А
VА=34.540.11=
3.8
м/![]()
План скоростей строим в масштабе v , который определяем:
![]()
где (ра)-величина скорости точки А на плане скоростей, мм.
Пусть (ра)=50мм. Тогда:
![]()