

Билет 1
1)Объекты управления
В зависимости от свойств или назначения могут быть выделены технические, технологические, экономические, организационные, социальные и другие объекты управления и комплексы. Характер выходной функции объекта зависит от входного воздействия и от свойств объекта. Выходная функция может отличаться от входной функции по трем признакам:
По физической природе (физическое преобразование сигнала);
По временному соотношению (информационное преобразование сигнала);
По энергетическому уровню (энергетическое преобразование сигнала).
Объекты с самовыравниванием:
Х
 арактерное
свойство этих объектов – выходная
координата принимает установившееся
значение, если входное воздействие
становится постоянным, причём после
прекращения входного воздействия
выходная координата стремится к нулю.
арактерное
свойство этих объектов – выходная
координата принимает установившееся
значение, если входное воздействие
становится постоянным, причём после
прекращения входного воздействия
выходная координата стремится к нулю.
![]() -
объект со свойствами апериодического
звена первого порядка,
-
объект со свойствами апериодического
звена первого порядка,
 -
объект со свойствами колебательного
звена,
-
объект со свойствами колебательного
звена,
![]() -
объект со свойствами апериодического
звена второго порядка,
-
объект со свойствами апериодического
звена второго порядка,
г![]()
![]() де
- передаточная функция объекта,
де
- передаточная функция объекта,
- передаточный коэффициент,
![]() -
постоянные времени,
-
постоянные времени,
![]() -
коэффициент затухания.
-
коэффициент затухания.
Управление такими объектами возможно по пропорциональному (П-регулятор) или пропорционально-интегральному (ПИ-регулятор) законам регулирования. В последнем случае статическая ошибка равна нулю при постоянном входном воздействии. Если объект второго порядка, то применяют пропорционально-интегрально-дифференциальный (ПИД-регулятор) закон регулирования.
Объекты без самовыравнивания.
Нейтральными объектами (без самовыравнивания) называются такие, в которых по окончании воздействия устанавливается новое состояние равновесия, отличное от первоначального и зависящие от произведенного воздействия.
![]() -
объект обладает свойствами апериодического
и интегрирующего звеньев (реальное
интегрирующее звено).
-
объект обладает свойствами апериодического
и интегрирующего звеньев (реальное
интегрирующее звено).
 Применять
интегральный закон регулирования
нельзя, так как это приводит к повышению
порядка астатизма системы (второй
порядок), ибо сам объект является
интегрирующим звеном.
Применять
интегральный закон регулирования
нельзя, так как это приводит к повышению
порядка астатизма системы (второй
порядок), ибо сам объект является
интегрирующим звеном.
Системы с астатизмом второго порядка построить можно, но требуется сложное корректирующее звено, обладающее дифференцирующими свойствами. Обычно применяют регуляторы типа П или ПД.
Объекты с запаздыванием.
Ч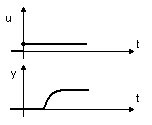 аще
других встречаются объекты с запаздыванием,
описываемые передаточной функцией
аще
других встречаются объекты с запаздыванием,
описываемые передаточной функцией
![]() ,
где
- постоянная запаздывания.
,
где
- постоянная запаздывания.
τ
Регуляторы для этих объектов обязательно содержат дифференцирующую часть в законе регулирования, чтобы компенсировать запаздывание, вносимое в САУ объектом.
Виды возмущений:
Внешние возмущения:
- изменение Еп
- изменение Rнагр
- трение в передаче между двигателем и объектом
- неуравновешенность вращающихся масс и другое
2) внутренние возмущения
- изменение характеристик звеньев системы
- изменение трения
- изменение теплопроводности
- дрейф нулей усилителей и другое