лирования, так как одновременно с уменьшением S1 и ω уменьшается и S0 (кривая 1).
Расчет интегрального квадратичного критерия для различных процессов регулирования при m=const показал, что минимум Iкв соответствует точке на кривой равной колебательности вблизи от вершины иа правой ветви. На практике рекомендуется выбирать рабочую частоту из соотношения ωp≈1,2ω0 или ωp≈0,8ωп,
где ω0 – частота, соответствующая вершине кривой m=const;
ωп – частота, соответствующая пропорциональному закону регулирования (рис. 91а).
Таким образом методика расчета оптимальных настроек ПИ-регуля-
-тора сводится к следующему: 1) расчет расширенных частотных характеристик объекта для заданной степени колебательности; 2) построение кривой равной колебательности в плоскости S1, S0; 3) выбор ωp и соответствующих ей S1опт и S0опт.
ПИД-регулятор – регулятор с тремя параметрами настройки S0, S1, S2. Вместо плоскости параметров настройки для ПИД-регулятора мы имеем трехмерное пространство. В этом случае определение оптимальных параметров настройки производится в следующем порядке. Задаваясь значением S2=const, по формулам рассчитывают соответствующие ему S0 и S1 и строят кривую равной степени колебательности в плоскости S0S1. Задаваясь различными значениями S2 и повторяя расчеты, получают серию кривых равной степени колебательности в плоскости S0S1. Характер этих кривых аналогичен уже рассмотренной ранее кривой равной колебательhoctи для ПИ-регулятора (т.е. S2=0). Для каждого значения S2 условно оптимальные настройки S0 и S1, определяются так же, как и для ПИ-регулятора (рис. 93а).
|
Рис. 93 |
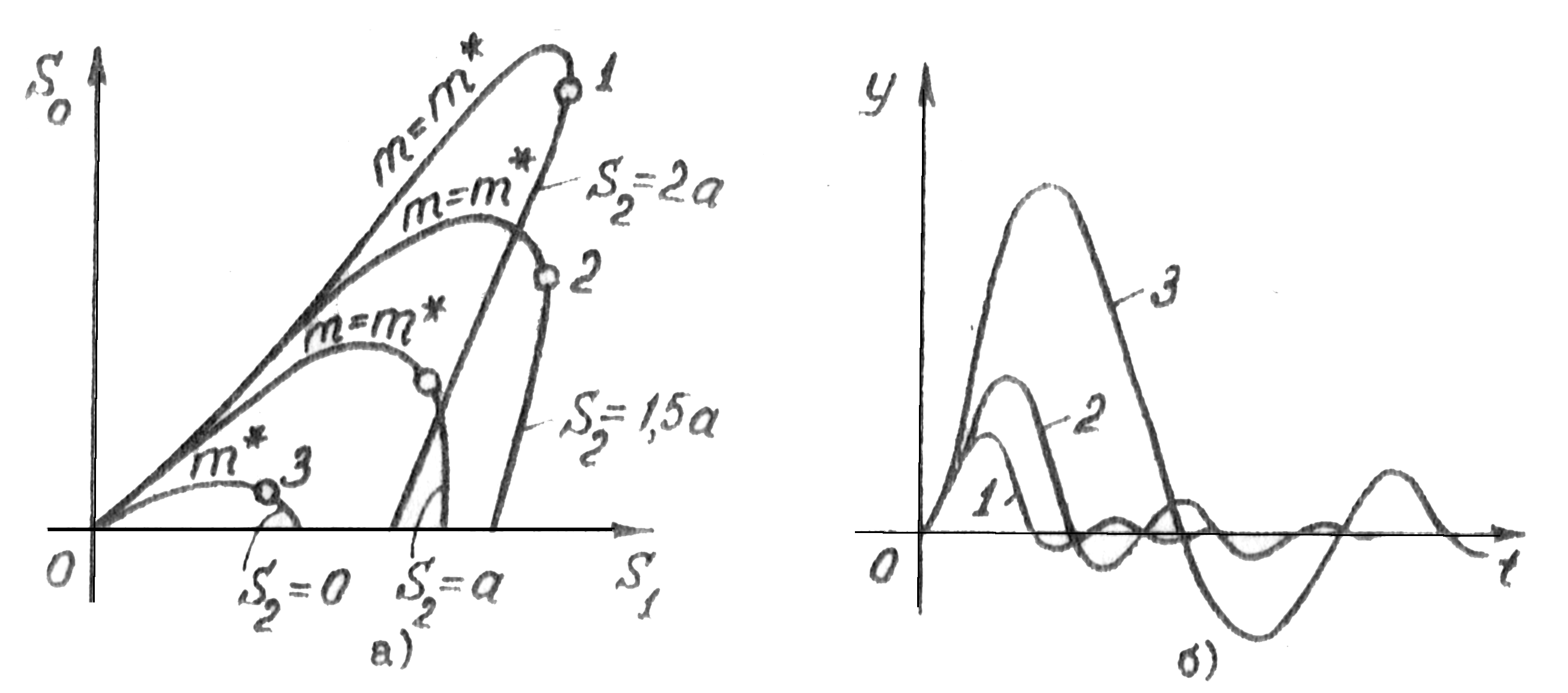
Сравнение между собой оптимальных процессов регулирования для различных значений S2 показывает, что введение дифференциальной составляющей в закон регулирования резко улучшает качество переходных процессов в АСР (рис. 93б); однако, начиная с некоторых значений S2, дальнейшее увеличение этого параметра настройки мало эффективно. Следовательно выбор оптимального значения S2опт и соответствующих ему S0опт и S1опт должен производиться на основе непосредственного сравнения качества процессов регулирования, соответствующих различным значениям S2, по интегральному квадратичному критерию Iкв; в качестве оптимальных настроек выбираются настройки, обеспечивающие наименьшее по сравнению с другими значение Iкв.
§2. Метод незатухающих колебаний
Рассматриваемый ниже приближенный метод определения оптимальных настроек регуляторов, называемый методом незатухающих колебаний, был предложен американскими учеными Циглером и Никольсом.
Метод применяется для объектов с запаздыванием. В соответствии с этим методом расчет настроек ПИ- или ПИД-регуляторов проводится в два этапа: 1)расчет критической настройки пропорциональной составляющей S1кр (S0=S2=0), при которой АСР будет находиться на границе устойчивости; 2)определение S1кр по приближенным формулам оптимальных настроек S1опт, S0опт, S2опт, обеспечивающих для большинства объектов степень затухания 0.75 и сравнительно небольшую динамическую ошибку.
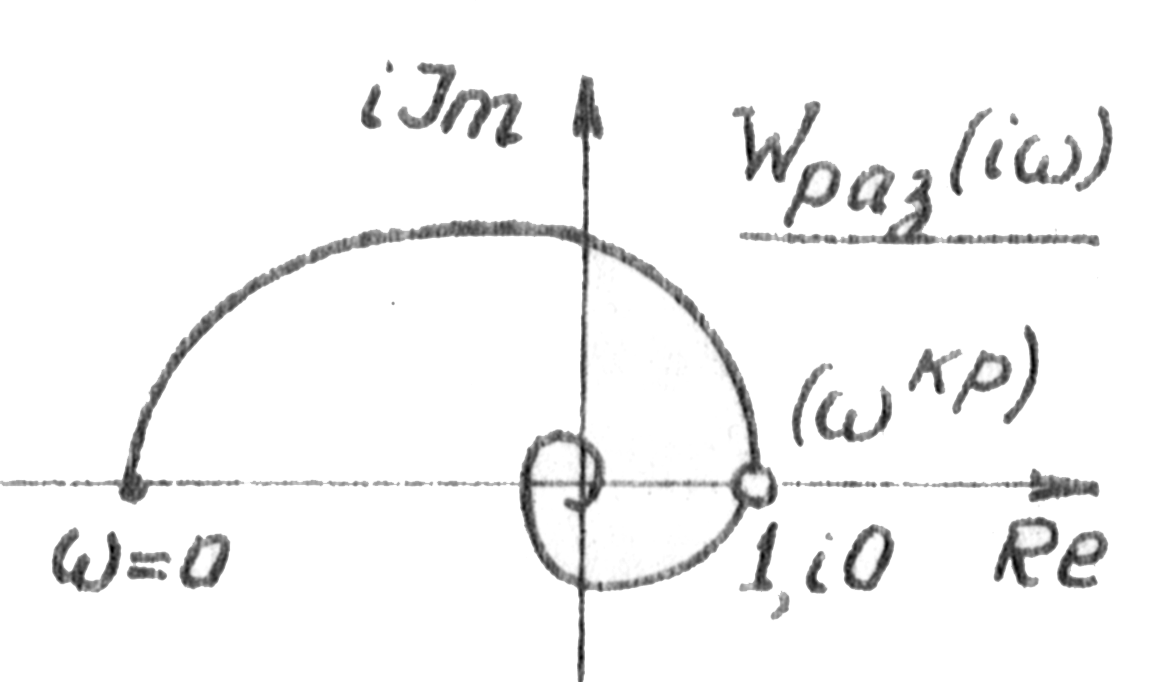
Исходное уравнение для расчета критического значения настройки пропорциональной составляющей S1кр выводится из критерия Найквиста, согласно которому при устойчивости разомкнутой системы замкнутая САР будет находиться на границе устойчивости, если АФХ разомкнутой системы проходит через точку (1,iO) (рис. 116) Т.о. для некоторого значения частоты (обозначим ее кр) будет выполняться соотношение
Wраз(iкр)=1 |
(6-12) |
Как видно из (6-12), в отличие от метода расширенных частотных характеристик здесь расчет П-регулятора ведется по обычным частотным характеристикам объекта и S1кр и кр определяются из уравнений
|
-об(кр)=; |
|
|
Рис. 94 |
|
Рабочие настройки ПИ и ПИД-регуляторов определяются по найденным S1кр и ωкр по формулам, предложенным Циглером и Никольсом, из которых можно вывести соотношения:
для П-регулятора:
S1=0,5S1кр |
(6-13) |
для ПИ-регулятора:
S1=0,45S1кр; |
(6-14) |
S0=0,08S1кркр; |
|
для ПИД-регулятора:
S1=0,6S1кр; |
S0=1,9S1кркр; |
|
(6-15) |
Метод незатухающих колебаний часто используется на практике для экспериментального определения близких к оптимальным настроек регуляторов.
Выше мы рассмотрели методы расчета настроек различных регуляторов. Выбор того или иного типа регулятора определяется в каждом конкретном случае в зависимости от свойств объекта регулирования и динамических характеристик регулятора.
НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ Глава 7. ХАРАКТЕРИСТИКИ НЕЛИНЕЙНЫХ СИСТЕМ
§1. Особенности нелинейных систем
Нелинейными называются системы, которые не подчиняются принципу суперпозиции. Система будет нелинейной, если она содержит хотя бы одно звено, для которого не выполняется принцип суперпозиции.
Различают два типа нелинейностей: слабые нелинейности и существенные нелинейности. К первой группе относят такие характеристики, которые при малом диапазоне изменения координат могут быть заменены линейными зависимостями. Ко второй группе относятся нелинейные характеристики, которые являются существенно нелинейными функциями, например, разрывными или близкими к разрывным. Такие характеристики могут быть чаще всего представлены в виде кусочно-линейных функций.
Характер возможных движений в нелинейной системе значительно разнообразнее, чем в линейной. Некоторые особые свойства нелинейных элементов нашли применение в технике. Так, в ряде случаев нелинейные регуляторы (например, регуляторы с переменной структурой, т.е. регуляторы, у которых закон регулирования изменяется в зависимости от величины отклонения регулируемой координаты и её производных) оказываются существенно более эффективными для управления. На нелинейных свойствах основано выпрямление переменного тока, генерирование электромагнитных колебаний, ведение технологического процесса в колебательном режиме, когда в силу нелинейности характеристик процесса производительность аппарата, в котором он реализован, оказывается выше, чем при стационарном управлении.
В других случаях нелинейность характеристик приводит к вредным последствиям. При этом либо приходится искать пути устранения нелинейностей, либо так выбирать режим функционирования системы, чтобы нелинейности меньше сказывались на результатах работы.
Отметим некоторые характерные особенности нелинейных систем по сравнению с линейными. Все эти особенности вытекают из основного свойства нелинейных систем – неподчинение принципу суперпозиции.
Линейные системы |
Нелинейные системы |
1. При подаче на вход линейной системы гарнонического сигнала на ее выходе также устаиавливаются гармонические колебания с той же частотой, которую имеют входные колебания. |
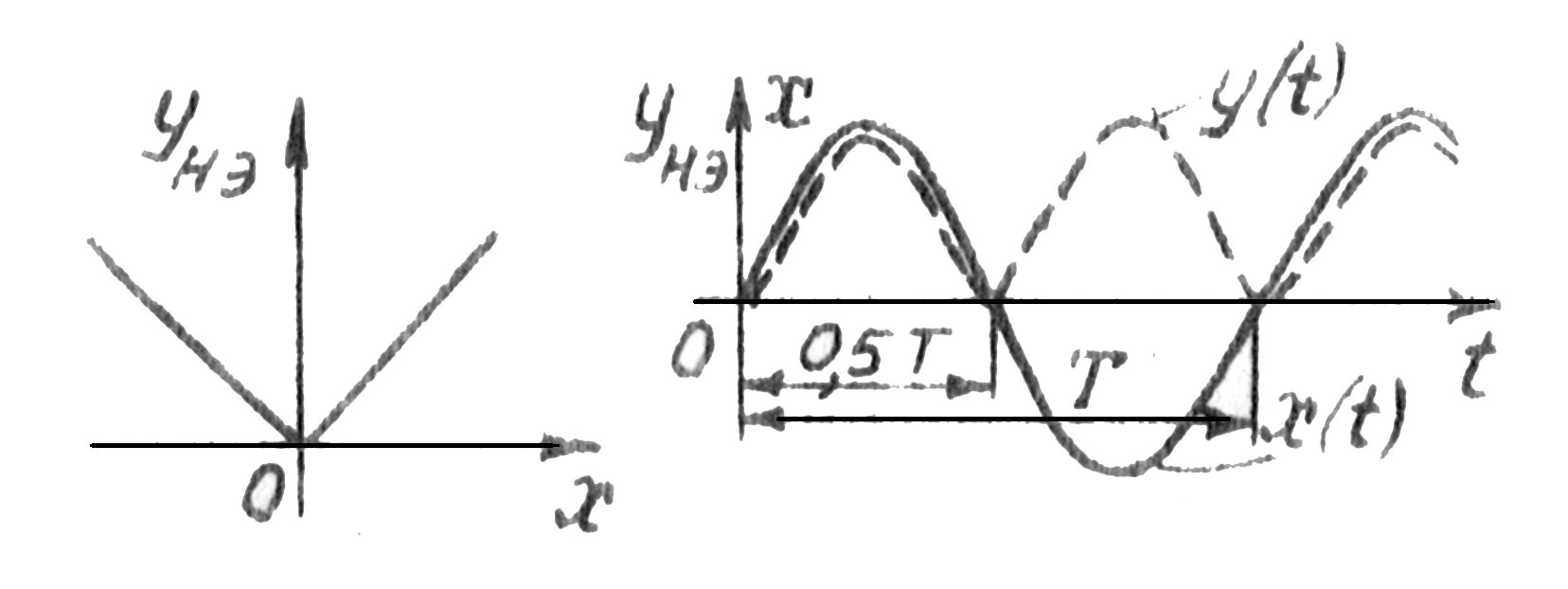
1. Вынужденные колебания в нелинейных системах могут отличаться от входного гармони-ческого сигнала как по форме, так и по частоте. Например, для нелинейного элемента со статической характеристикой yнэ=|х| вынужден-ные колебания не являются гармоническими колебаниями и их период вдвое меньше, чем период входных колебаний.
|
2.Частотные характеристики линейных систем на зависят от амплитуды входного сигнала и полностью определяются свойствами системы. |
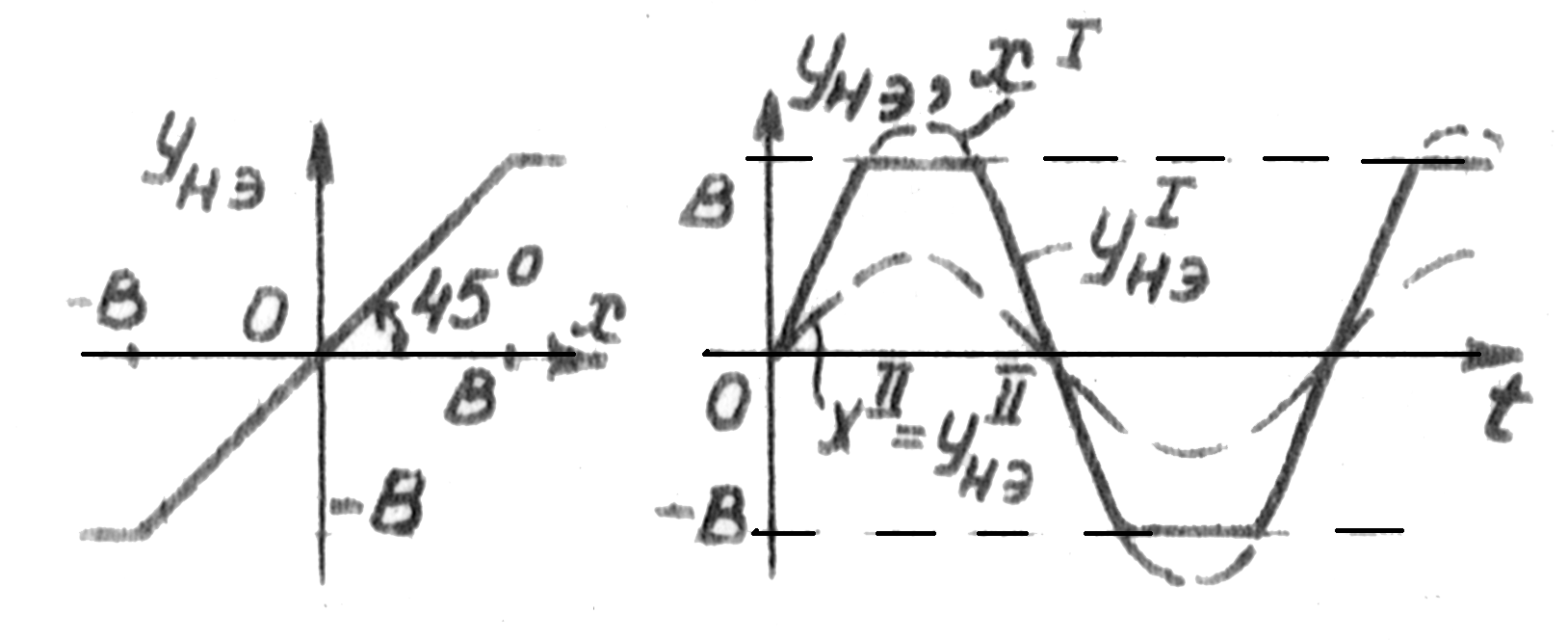
2.Частотные характеристики существенно зависят от амплитуды входного сигнала. Так, нелинейный элемент со статической характеристикой, представленной на рисунке, при малой амплитуде входного сигнала (AB) ведет себя как линейное звено, а при больших амплитудах входного сигнала (A>B) выходные колебания искажаются
|
З. Если линейная система устойчива (или неустойчива), то она устойчива (или неустойчива) при любых начальных условиях. Поэтому в каждой линейной системе возможен только один тип движения: в устойчивой системе - асимптотическое приближение к состоянию равновесия, в неустойчивой системе - удаление от состояния равновесия. |
3. Нелинейная система может быть устойчивой “малом” или устойчивой “в большом”. В первом случае при малых начальных отклонениях система ведет себя как устойчивая, а при значительных отклонениях - как неустойчивая сиcтема. Таким образом в нелинейных системах устойчивость состояния равновесия зависит от начальных условий. Поэтому в нелинейных системах возможны различные типы движения в зависимости от начальных условий. |
4. Незатухающие колебания в линейной системе возможны только тогда, когда система находться на границе устойчивости, причем амплитуда свободных колебаний определяется начальными условиями. |
4. В нелинейных системах возможны незатухающие колебания, амплитуда и частота которых не зависит от начальных условий и определяется свойствами системы. Такие колеба-ния называются автоколебаниями. Примерами автоколебательных сис-тем являются часы, электрический звонок; автоколебания наблюдаются также при определенных условиях в системах автоматического регули-рования, содержащих нелинейные элементы. |