

Лекции по ТАУ
Лекция 3 Методы математического описания линейных элементов асу
1. Характеристики воздействий и сигналов в асу
Основные виды сигналов: регулярные (детерминированные), нерегулярные (случайные), непрерывные, дискретные.
Сигнал называется регулярным, если его математическим представлением является заранее заданная функция времени, т.е. он описывается конкретной функцией времени.
При исследовании АСУ и их элементов используют ряд стандартных сигналов, называемых типовыми воздействиями. Эти воздействия описываются простыми математическими функциями и легко воспроизводятся при исследовании АСУ. Использование типовых воздействий позволяет унифицировать анализ различных систем и облегчает сравнение их передаточных свойств.
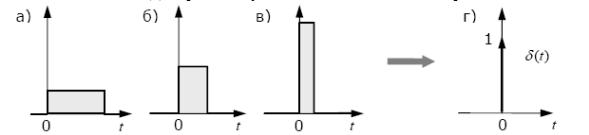
Наибольшее применение в ТАУ находят следующие типовые воздействия:
ступенчатое;
импульсное;
гармоническое;
линейное.
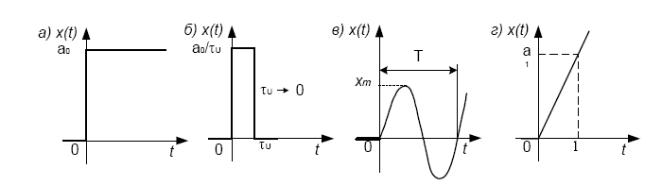
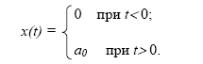
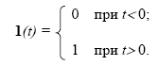
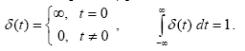
Рис.5. Типовые воздействия в ТАУ
Ступенчатое воздействие:
Единичное ступенчатое воздействие:
Единичное импульсное воздействие – дельта-функция (Дирака):
Иногда определяют дельта-функцию как производную от единичного ступенчатого сигнала 1(t):
Действительно, эта производная равна нулю при всех значениях t , кроме нуля, где она обращается в бесконечность.
Гармоническое воздействие – сигнал синусоидальной формы, описываемый функцией:
x(t) = xm sinωt , (-∞< t <∞).
Гармонический сигнал, начинающий действовать в момент времени t = 0, описывают при помощи единичной ступенчатой функции:
x(t) = 1(t)∙xm sinωt , (0 ≤t <∞).
Линейное воздействие – воздействие, описываемое функцией:
x(t) = 1(t)∙а1 t , (0 ≤t <∞).
Коэффициент а1 характеризует скорость нарастания воздействия x(t).
2. Режимы работы сау
По характеру изменения управляемой величины во времени различают следующие
режимы элемента САУ:
• статический;
• динамический.
Статический режим – состояние элемента САУ, при котором выходная величина не изменяется во времени, т. е. y(t) = const.
Очевидно, что статический режим (или состояние равновесия) может иметь место лишь тогда, когда входные воздействия постоянны во времени. Связь между входными и выходными величинами в статическом режиме описывают алгебраическими уравнениями.
Динамический режим – состояние элемента САУ, при котором входная величина
непрерывно изменяется во времени, т. е. y(t) = var.
Динамический режим имеет место, когда в элементе после приложения входного воздействия происходят процессы установления заданного состояния или заданного изменения выходной величины. Эти процессы описываются в общем случае дифференциальными уравнениями.
Динамические режимы в свою очередь разделяются на:
переходный;
установившийся.
Переходный режим – режим, существующий от момента начала изменения входного воздействия до момента, когда выходная величина начинает изменяться по закону этого воздействия.
Установившийся режим – режим, наступающий после того, когда выходная величина начинает изменяться по такому же закону, что и входное воздействие, т. е. наступающий после окончания переходного процесса.