

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Факультет автоматики и вычислительной техники
Кафедра электропривода и автоматизации промышленных установок
В. В. РЫЧКОВ
Теория автоматического управления
Учебно-методическое пособие
Киров
2 014
014
УДК 681.5.011(07)
Р957
Допущено методическим советом
факультета автоматики и телемеханики ФГБОУ ВПО «ВятГУ» в качестве учебно-методического пособия
для студентов направления подготовки 140400.62 «Электроэнергетика и электротехника» профиля «Электропривод и автоматика» и направления подготовки 221000.62 «Мехатроника и робототехника» профиля «Привод робототехнических и мехатронных систем» всех форм обучения
Рецензент кандидат технических наук, доцент, заведующий кафедрой автоматики и телемеханики фгбоу впо «ВятГу» в. И. Семёновых
Рычков, В. В.
Р957 |
Теория автоматического управления: учебно-методическое пособие / В. В. Рычков. – Киров: ФГБОУ ВПО «ВятГУ», 2014. – 55 с. |
УДК 681.5.011(07)
Учебно-методическое пособие подготовлено для выполнения курсовых работ.
Тех. редактор А. В. Куликова
© ФГБОУ ВПО «ВятГУ», 2013
Введение
Курсовой проект является составной частью учебного процесса студентов направления 140400.62 «Электроэнергетика и электротехника» профиля «Электропривод и автоматика» и направления подготовки 221000.62 «Мехатроника и робототехника» профиля «Привод робототехнических и мехатронных систем» и имеет своей целью закрепление теоретических положений и получение навыков практических расчетов по курсу «Теория автоматического управления».
В работе предлагается произвести статический и динамический расчеты и синтез корректирующего устройства системы поддержания скорости двигателя с реальными характеристиками ее функциональных частей.
На рис. 1 приведена принципиальная схема замкнутой системы электропривода, в состав которой входят:
двигатель постоянного тока независимого возбуждения М;
тиристорный преобразователь ТП с системой импульсно-фазового управления СИФУ, управляемыми вентилями В и дросселем Др;
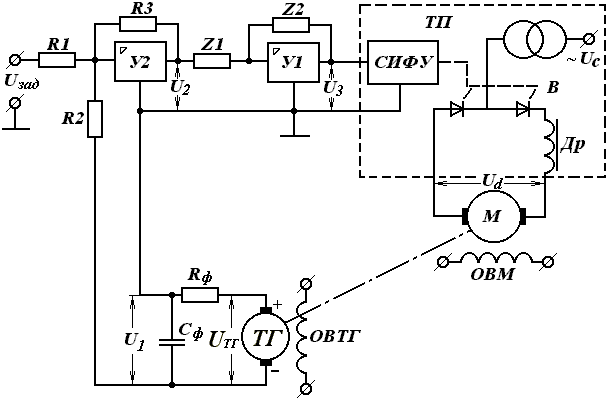
Р
В
операционный усилитель У1 для установки необходимого из условий статики коэффициента усиления замкнутого контура системы и подбора параметров коррекции, обеспечивающей заданные динамические свойства замкнутой системы;
сумматор на операционном усилителе У2;
тахогенератор ТГ с фильтром RФ – CФ.
В первой части настоящего учебно-методического пособия приведены исходные данные элементов системы и варианты задания для курсовой работы. Номер варианта задается преподавателем. Чётный вариант задания предусматривает построение точных логарифмических частотных характеристик и кривой переходного процесса (п. 3.4) при входном возмущающем воздействии в виде ступенчатого изменения напряжения сети, питающей преобразователь, UC=0,1·Ud зад, а нечетный вариант – при входном возмущающем воздействии в виде момента статической нагрузки МС=МН.
Во второй части изложено содержание пояснительной записки курсовой работы.
В третьей части приведены методические указания по выполнению курсовой работы.
В четвёртой части дан пример выполнения курсового проекта.