

Об'єктом вивчення в теорії автоматичного керування і регулювання є автоматичні системи, які протягом заданого тривалого часу належним чином змінює або підтримує незмінними деякі фізичні величини.
Система автоматичного регулювання (САР) складається з двох частин:
1. Об'єкта керування чи регулювання, у якому відбувається процес, що підлягає керуванню чи регулюванню;
2. Регулятора, що виконує функції виміру відхилення регульованої величини і перетворення його в регулюючий вплив на об'єкт, за допомогою якого підтримується заданий стан об'єкта.
Системи автоматичного керування і регулювання класифікуються за наступними критеріями:
1. Неперервність або дискретність процесів у часі – по цьому критерію розрізняють неперервні, дискретні або релейні САР.
2. Лінійність або нелінійність рівнянь динаміки – неперервні та дискретні САР.
Релейні САР відносяться до нелінійних.
Неперервні САР - в кожній ланці вихідна та вхідна величини є неперервними у часі (рис.1).
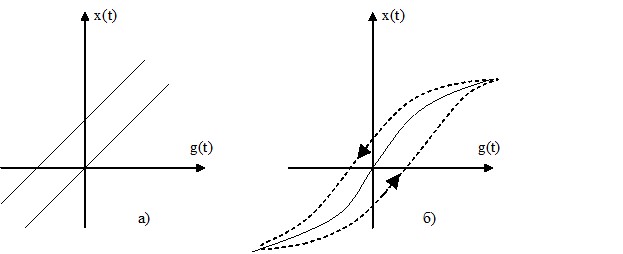
Рис.1
а – неперервна лінійна ланка; б – неперервна нелінійна ланка
Дискретні САР – хоча б в одній ланці при неперервному вхідному впливі g(t) вихідний сигнал х(t) має вигляд окремих імпульсів, наприклад, ланка, що перетворює неперервну величину у послідовність дискретних імпульсів (рис.2).
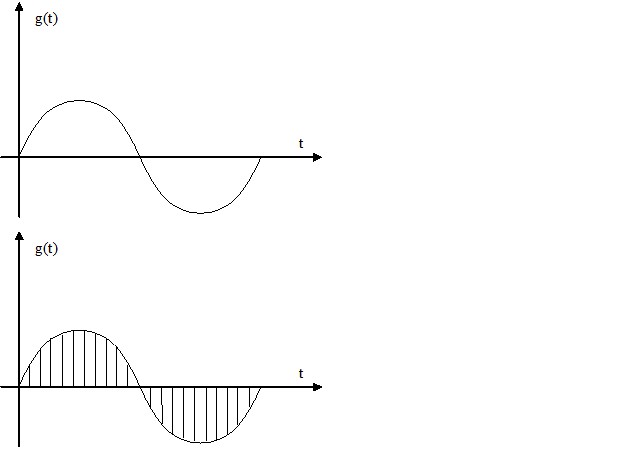
Рис.2
Якщо наступна ланка теж дискретна, то для неї і g(t), і х(t) є дискретними (імпульсними).
Релейна САР – хоча б в одній ланці при неперервному g(t) вихідна величина х(t) в деяких точках, що залежать від значення g(t), змінюється стрибкоподібно (рис. 3). Така ланка називається релейною.
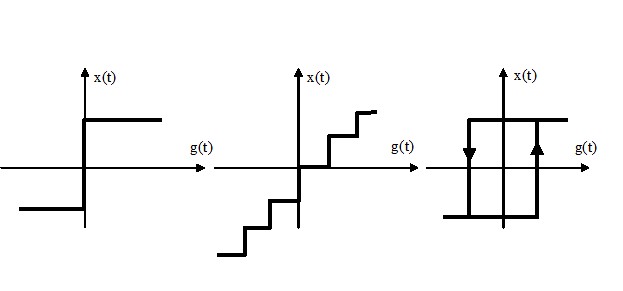
Рис.3
Лінійна САР – всі ланки описуються лінійними рівняннями.
Якщо динаміка процесів описується лінійними диференційними рівняннями та лінійними алгебраїчними рівняннями з постійними коефіцієнтами, така система називається САР з постійними параметрами.
Якщо у рівнянні деякої ланки є хоча б один змінний у часі коефіцієнти, така система називається САР зі змінними параметрами.
Якщо деяка ланка описується диференційними рівняннями у часткових похідних, така система називається САР з розподіленими параметрами.
Якщо деяка ланка описується рівняннями з аргументом, що запізнюється (тобто ланка має часову затримку ? передавання сигналу), така система називається САР з запізненням (рис. 4).
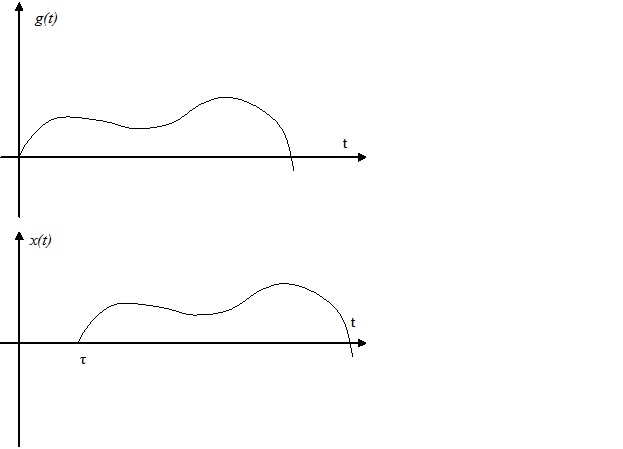
Рис. 4
Якщо динаміка деякої ланки описується різницевим рівнянням, така система називається дискретною САР.
По характеру процесів керування розрізняють САР детерміновані (визначені параметри і процеси) і стохастичні (випадкові процеси).
За принципом побудови розрізняють:
1. Жорсткі САР (системи з жорсткою логікою керування та жорсткою структурою).
2. Адаптивні системи (логіка керування та структура системи підлаштовуються в процесі роботи).
3. Термінальні системи – САР, які досягають заданого стану за кінцевих проміжок часу.
4. Оптимальні системи.
Основні задачі теорії автоматичного регулювання і керування:
1. Задача аналізу – аналіз процесів у системі, аналіз вхідних та вихідних сигналів.
2. Задача синтезу, яка поділяється на:
а) Задача структурного синтезу – побудова системи із заданими параметрами за заданими умовами;
б) Задача синтезу впливу – формування керуючих сигналів для забезпечення заданих властивостей системи.
1. Принципи керування
У техніці використовуються три фундаментальних принципи:
1) Принцип розімкненого керування;
2) Принцип компенсації (керування за збуренням);
3) Принцип зворотного зв'язку (керування за відхиленням).
Принцип розімкненого керування полягає в тому, що алгоритм керування ґрунтується тільки на заданому алгоритмі функціонування і не контролюється збуреннями чи вихідними координатами. Структурна схема САР з принципом розімкненого керування наведена на рис.1.1
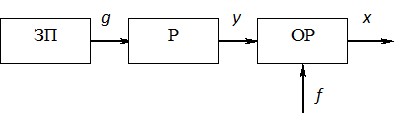
Рис.1.1
ЗП – задавальний пристрій; Р – регулятор; ОР – об'єкт регулювання; g – задавальний вектор станів пристрою; у – вектор станів регулятора; f – збурення; x – вектор станів об'єкта регулювання (вихідна величина).
У такій системі контроль за фактичним станом об'єкта регулювання не здійснюється, тому що близькість до бажаної поведінки системи забезпечується тільки точністю всіх елементів системи і відповідним вибором задавального вектора станів. Прикладом такої системи є параметричний стабілізатор напруги на стабілітроні. По розімкненому принципу побудовані пристрої пуску, лінійні підсилювачі, перетворювачі та ін.
Для компенсації відхилення x, що відбувається за рахунок появи збурень застосовують принцип компенсації та принцип зворотного зв'язку.
Принцип компенсації полягає в перетворенні збурення у величину того ж характеру, що і задавальний вплив, і зміні вектора регулятора таким чином, щоби здійснювалася повна компенсація збурення. Для цього вводиться канал компенсації КК.
Структурна схема САР з принципом компенсації наведена на рис.1.2.
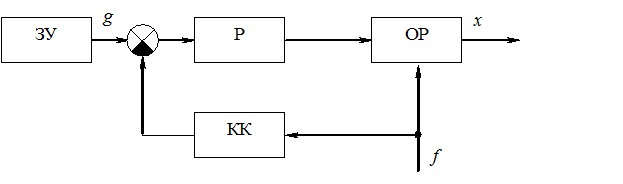
Рис.1.2
Перевагою принципу компенсації є можливість досягти інваріантості по збуренню. Недоліком є те, що відхилення вхідної величини від заданого значення може бути викликане впливом інших збурень.
Принцип компенсації використовується в системах стабілізації змінних стану об’єкта регулювання (струму, напруги, сили звуку, положення в просторі, тощо) в умовах збурень (зміна струму навантаження, напруга мережі, тощо).
У статичному режимі для систем стабілізації існують наступні типи залежностей вихідної величини x(t) від величини збурення f (рис.1.3):
1 – перекомпенсація;
2 – інваріантність – властивість системи, в якій збурення не впливає на вихідну величину;
3 – недокомпенсація;
4 – нелінійна залежність.
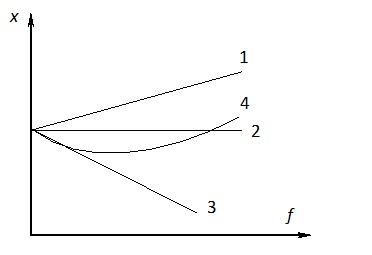

Рис.1.3
Принцип керування
по відхиленню полягає
в тому, що вихідна величина вимірюється,
і порівнюється з задавальним впливом.
У результаті виділяється деяке відхилення
(сигнал неузгодженості ![]() ,
рис.1.4), що перетворюється у вектор
регулювання y,
який впливає на ОР таким чином, щоби
зменшити зміну х.
,
рис.1.4), що перетворюється у вектор
регулювання y,
який впливає на ОР таким чином, щоби
зменшити зміну х.
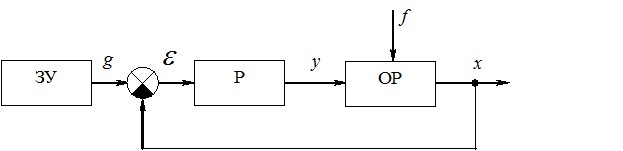
Рис.1.4
У системі автоматичного регулювання для реалізації керування по відхиленню вводять зворотний зв’язок на відміну від принципу компенсації, в якому немає зворотного зв’язку, і вихідна величина не надходить на вхід схеми.
Переваги принципу зворотного зв’язку:
1) відхилення х зменшується незалежно від того, якими факторами воно викликане;
2) менша чутливість до зміни параметрів елементів схеми в порівнянні з розімкненими системами;
3) принцип можна застосовувати до об'єктів, характеристики яких невідомі – бажано знати характеристики об’єкту, але не обов’язкове детальне і точне знання всіх характеристик, більш принциповою є умова можливості керування, тобто керованості об’єкту керування;
4) технічно легше реалізовується в порівнянні з розімкненими системами, де необхідний точний попередній розрахунок всіх параметрів, характеристик та сигналів, їх узгодження між собою, а також підлаштування параметрів в процесі роботи.
Недоліки:
1) у простих одноконтурних системах не можна досягти повної інваріантності;
2) для систем із зворотними зв’язками характерна проблема стійкості.
Застосування комбінованого регулювання по збуренню та відхиленню підвищує ефективність регулювання. Комбіновані регулятори поєднують переваги обох принципів – швидкість реакції на зміну збурення і точне регулювання незалежно від причини, що викликала відхилення.