

Курсовой проект
по курсу "Теория электропривода"
на тему: "Проектирование электропривода подъема мостового крана"
Введение
В данном курсовом проекте необходимо разработать силовую часть электропривода механизма захвата манипулятора. В процессе проектирования необходимо выбрать способ реализации данного электропривода, рассчитать его рабочие характеристики, произвести тепловой расчет и обеспечить требуемую динамику, разработать схему электрическую принципиальную и т.д.
2. Описание рабочей машины и её технологического процесса; исходные данные для проектирования электропривода.
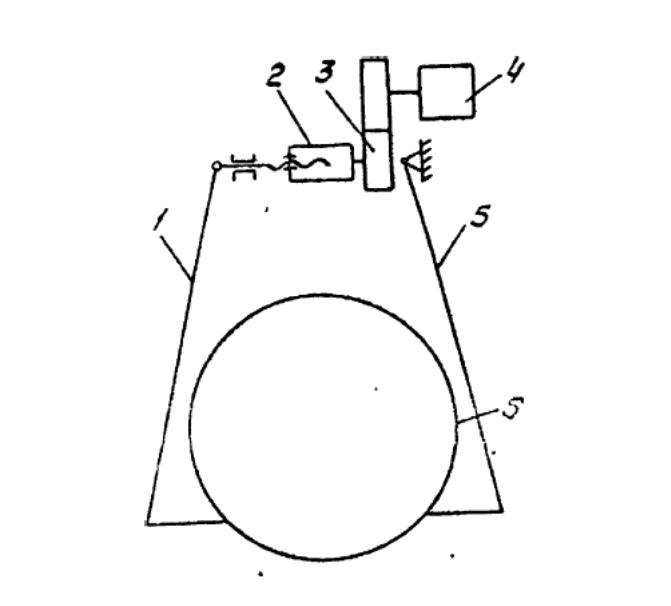
Рис.1 Кинематическая схема механизма захвата
1и 5 – захваты ; 2 – винтовая передача ; 3- редуктор; 4- электродвигатель; 6- труба;
Механизм захвата манипулятора служит для подхвата труб, которые транспортируются в пределах участка цеха. При подхвате включается двигатель и с помощью редуктора и винтовой передачи захваты подводятся к трубе с установившейся скоростью Vс. Пройдя расстояние, равное половине длины выдвижения винта L, захваты приподнимают и зажимают трубу. После перемещения трубы (специальным механизмом) на нужную позицию происходит реверсирование механизма, захваты разводятся и при половине длины выдвижения винта L отпускают трубу. Скорость поступательного движения винта при разведении захватов Vр > Vс .В расчетах принять массу захватов равной 0,1* m – приведенной массы, а противодействующую силу, создаваемую захватами, равной 0,1*Q – приведенной силы. В табл. А.6 приведены значения m и Q с учетом захватов.
Таблица 1. Технические данные механизма захвата манипулятора.
Наименование показателя |
Обозначение |
Размерность |
Величина |
Противодействующая сила |
Q |
кН |
18 |
Средний диаметр нарезки винта |
Db |
мм |
92 |
Угол подъема нарезки винта |
а |
˚ |
5,8 |
Угол трения в нарезке винта |
φ |
˚ |
5 |
Приведенная масса |
т |
т |
160 |
Линейная жесткость механизма |
|
Нм/м |
80 |
Длина выдвижения винта |
L |
м |
0,15 |
Скорость поступательного движения при сведении захватов |
Vс |
мм/с |
50 |
Скорость поступательного движения при разведении захватов |
Vр |
мм/с |
80 |
Допустимое ускорение |
а |
мм/с2 |
80 |
Число циклов в час |
Z |
- |
65 |
Суммарное время работы не более |
tp |
c |
11 |

3. Расчёт моментов статических сопротивлений и предварительный расчёт мощности электродвигателя.
1 Анализ и описание системы “Электропривод рабочая машина”
1.1 Количественная оценка вектора состояния или тахограммы требуемого процесса движения
По заданию имеем допустимое ускорение а=0.08 м/с2. Согласно цикла работы сначала при подхвате включается двигатель и с помощью редуктора и винтовой передачи захваты подводятся к трубе с установившейся скоростью Vс. Пройдя расстояние, равное половине длины выдвижения винта L, захваты приподнимают и зажимают трубу. Время сведения захватов можно рассчитать по следующей формуле:
1) время пуска tп до установившейся скорости с допустимым ускорением, торможения tт от установившейся скорости до остановки:
 (1)
(1)
2) путь, проходимый за время пуска (торможения) рабочей машиной:

 (2)
(2)
3) время установившегося режима движения со скоростью Vy:
 (3)
(3)
тогда, для режима разгона и торможения груженого захвата получим:
 c;
c;
 м;
м;
 =2,4
с.
=2,4
с.
Для режима разгона и торможения пустого захвата по формулам (1), (2) и (3) найдем:
 с;
с;
 м;
м;
 с.
с.
4) Полное время работы:
а)
рабочий ход
 (с)
(с)
б)
обратный ход
 (с)
(с)
 (c)
(c)
Момент сил трения в винтовой передаче при выдвижении винта, преодолевающего силу Q:

Момент сил трения в винтовой передаче при возвратном движении винта в направлении действия силы Q:

Определим угловые скорости движения вала:
 рад/с
рад/с

Определим радиус приведения сил:
 м ,
м ,
Где V – скорость линейного перемещения винта;
ω – угловая скорость движения винта;
Для определения динамического момента рабочей машины рассчитывается момент инерции рабочего органа с грузом и без груза:
 кг*
кг*
Определим динамический момент с учетом величины допустимого ускорения:
 Н*м
Н*м
Полный момент рабочей машины:

При сведении захватов:
 Н*м
Н*м
При разведении захватов:
 Н*м
Н*м
Рисунок 2. Нагрузочные диаграммы
На основе построенной нагрузочной диаграммы момента рабочей машины можно рассчитать среднеквадратичное значение момента,
 Н
Н
При этом мощность двигателя может быть определена по соотношению:
 (16)
(16)
где k1 – коэффициент, учитывающий динамические нагрузки, обусловленные вращающимися элементами электропривода (двигатель, редуктор), а также потерями в редукторе. Примем k1 = 1,4;
ПВФ – фактическое значение относительной продолжительности включения проектируемого электропривода;
ПВК – ближайшее к ПВФ каталожное значение относительной продолжительности включения для электродвигателей выбранной серии;
Фактическое значение относительной продолжительности включения ПВФ рассчитывается по длительности времени работы tК на всех m участках движения по заданному времени цикла:
 с.
с.
Где Z - число циклов работы машины в час
Тогда

Тогда
Рдв= Вт
Вт