

Основы теории управления
Управление – целенаправленное воздействие на объект с целью приведения его в требуемое состояние.
Управление является автоматическим, если осуществляется без вмешательства человека с помощью технических устройств.
Теория должна давать единую базу для решения задач управления объектами различной физической природы.
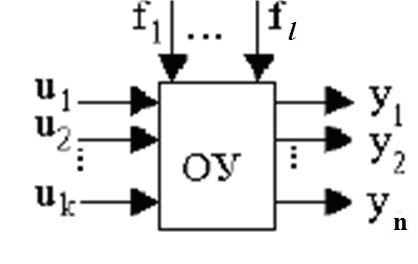
u1, u2, …, uk – входные (управляющие) воздействия y1, y2, …, yn – выходные (управляемые) величины
f1, f2, … fl – возмущающие воздействия (помехи)
В более простом случае у объекта одно управляющее воздействие и одна регулируемая величина
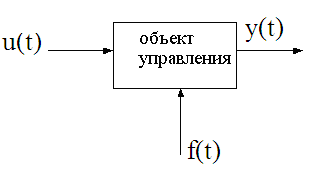
y(t) = F [u(t)]или y(t) = F [(t), f(t)]
Примеры систем управления
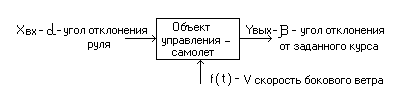
Управление движущимся объектом

Управление электротехническим объектом

Управление теплотехническим объектом

Управление химической или биологической технологией
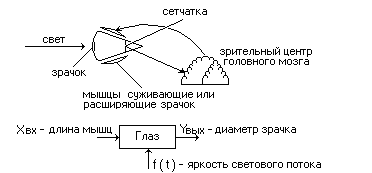
В общем виде имеем следующую структуру
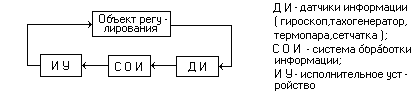
Общий алгоритм функционирования системы управления
Определение (измерение) текущего состояния объекта управления
Сравнение текущего и желаемого состояния объекта управления
Определение требуемого воздействия (управления ) и реализация воздействия на объект управления
Обеспечение качества процесса устранения возникшего отклонения
В курсе ОТУ всегда необходимо помнить две вещи :
исходными являются не уравнения, а реальный технический объект
результатом проведенных исследований, расчетов и т.п. являются не некоторые математические утверждения, а их техническая реализация
Основные задачи, которые будут рассматриваться в курсе
Задача анализа: При известной структуре, схеме, параметрах звеньев системы автоматического управления провести анализ временных и частотных характеристик
Задача синтеза: При известном объекте управления подобрать структуру и параметры системы так, что бы она обеспечивала заданное качество управления объектом
Кибернетическая модель системы
В более общем виде систему можно рассматривать как «черный ящик», преобразующий входное воздействие g(t) в управляемую величину y(t)

Литература по курсу ОТУ
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1975. - 768с.
2. Попов Е.П. Теория линейных систем автоматического регулирования и управления. - М.: Наука, 1989. - 304с.
3. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. - М.: Наука, 1979. - 256с.
4. Первозванский А.А. Курс теории автоматического управления. - М.: Наука, 1986. - 616с.
5. Воронов А.А. Основы теории автоматического управления. Особые линейные и нелинейные системы. - М.: Энергоиздат, 1981. - 304 с.
6. Коновалов Г.Ф. Радиоавтоматика. - М.: Высшая школа, 1990. - 335с.
7. Куропаткин П.В. Теория автоматического управления. - М.: Высшая школа, 1973.- 507 с.
8. Сборник задач по теории автоматического регулирования и управления / Под ред. В.А.Бесекерского. - М.: Наука, 1978. - 512 с.
9. Иващенко Н.Н. Автоматическое регулирование. М.: Машиностроение, 1978. – 609 с.
10. Юревич Е.И. Теория автоматического управления. - Л.: Машиностроение, 1980. -412 с.
11. Имаев Д.Х. и др. Анализ и синтез систем управления. Теория. Методы. Примеры решения типовых задач с использованием персонального компьютера. - Санкт- Петербург, Гданьск, Сургут, Томск, 1998. - 172 с.
Классификация САУ
По принципу управления
- разомкнутая

-замкнутая

- комбинированная

По цели управления
- регулирования y(t) const
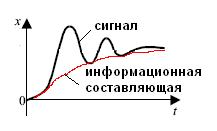
- слежения y(t) x(t) – var
- управления y(t) ужел(t) – var
По виду математических моделей ОУ и блоков САУ
- линейные (линеаризованные)
- нелинейные
По количеству регулируемых параметров
- одномерные (у всех блоков один вход, один выход)

- многомерные

По характеру изменения сигналов по времени
- непрерывные (аналоговые)

- дискретные
- модулированные
По характеру изменения параметров ОУ и блоков САУ

- стационарные
a, b, c,… = const
нестационарные
a, b, c,… = var (t)
c запаздыванием
а = aе-
Понятие динамического звена
Каждый элемент САУ – динамическое звено. Для динамического звена известны «вход» - X и «выход» - Y и математическое описание преобразования «вход - выход»
Примеры динамических звеньев
|
|


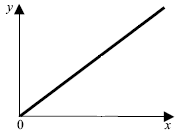
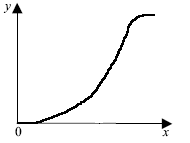
Динамическое звено характеризуется:
- статической характеристикой
|
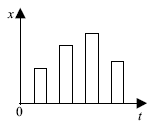
- динамической характеристикой
|
Вывод уравнения преобразования динамического звена

Хвх(t) 
 ? Хвых(t)
? Хвых(t)
Динамика выходного процесса Хвых(t) описывается произвольным уравнением:
(![]() вых(t),
вых(t),![]() вых)
= F(
вх(t),
вх,
вых)
= F(
вх(t),
вх,
![]() вх)
вх)
Установившийся процесс в системе имеет место при некоторых значениях вх =x0вх; вых =x0вых. Тогда установившееся состояние данного звена:
( x0вых, 0)= F(x0вх, 0, 0)
В динамическом процессе
вых = x0вых + вых вх = вх вх = вых
вх = x0вх + вх вых = вых
Разложим в ряд Тейлора уравнение динамики
(
x0вых)
+
![]()
вых
+
вых
+
![]()
вых
+ … = F(x0вх)
+
вых
+ … = F(x0вх)
+
![]()
вх
+
вх
+
![]()
вх
+
вх
+
![]()
вх
+ …
вх
+ …
Вычтем из него уравнение статики и отбросим высокие производные
вых + вых = вх + вх + вх