

4.2. Практичний розрахунок непризматичної одно прогонної балки на змінній пружній основі мсе
4.2.1. Розрахункова схема та вихідні дані.
З м і с т з а в д а н н я. Виконати розрахунок елементів згину заданої непризматичної балки на змінній пружній основі з пружними затисненнями на опорах за допомогою МСЕ з використанням обчислювального комплексу (пакету програм) ANSYS. Задана балка моделює згинання поздовжніх міцних фундаментних балок під головним двигуном (ГД) у машинному відділенні корпусу судна (див. рис. 1.1). Балка завантажена силами ваги ГД та силами гідростатичного тиск води на днище.
Визначити прогини, кути повороту, згинальні моменти та зрізувальні сили у наступному (безрозмірному) вигляді:
 ,
,
 ,
,
 ,
,
 .
.
. . . . . .
Питання для самоконтролю
Дати загальну характеристику методу скінчених елементів (МСЕ): вказати це є точний чи наближений, аналітичний чи числовий, для яких конструкцій може застосовуватися, що підлягає дискретизації у методі.
Пояснити та показати на прикладі схеми дискретизації для: а) балочної б) пластинчатої та в) тривимірної розрахункових схем у МСЕ.
Пояснити, що таке скінченні елементи (СЕ), яких видів вони бувають для а) балочної б) пластинчатої та в) тривимірної розрахункових схем та вказати їх властивості.
Пояснити, чому для пластин трикутні СЕ є більш загальними ніж прямокутні СЕ.
Вказати, що приймається за невідомі в МСЕ: а) у варіанті методу сил та б) у варіанті методу переміщень.
Вказати та зобразити графічно мінімальну кількість невідомих у вузлі плоского стержневого СЕ та максимальну кількість невідомих у вузлі просторового стержневого СЕ у варіанті методу переміщень.
Вказати та зобразити графічно мінімальну кількість невідомих у вузлі плоского стержневого СЕ та максимальну кількість невідомих у вузлі просторового стержневого СЕ у варіанті методу сил.
Пояснити, як визначаються елементи згину у межах плоского балочного СЕ та який їх зв’язок з елементами згину у вузлових точках СЕ.
Пояснити, як визначаються елементи згину у межах плоского пластинчатого СЕ та який їх зв’язок з елементами згину у вузлових точках – вершинах СЕ.
Пояснити, яким чином встановлюється функціональний зав’язок між переміщеннями та зусиллями у вузлових точках скінченних елементів.
Вказати, які рівняння складають для визначення основних невідомих а) у варіанті методу сил та б) у варіанті методу переміщень для МСЕ.
Вказати, яким чинниками визначається точність розрахунків при застосування МСЕ.
Чисельні методи для початкових задач бмк
При розв’язанні початково-крайових задач БМК виникають початкові задачі Коші з диференціальними рівняннями за часом, наприклад, при використанні МСЕ, для інтегрування яких також було розроблено потужну множину чисельних методів [2, 6, 11]. Спільним для цих методів є дискретизація часової координати t на моменти часу tk, k=0,1,2,… в основному з рівномірним кроком Δt (тоді tk=kΔt), але в деяких обчислювальних схемах і з нерівномірним адаптованим кроком Δtk (tk=tk-1+Δtk). Іншим загальним положенням є те, що до моменту часу tk розв’язок вважається відомим і потрібно його отримати для наступного моменту часу tk+1. Різні чисельні методи як раз і відрізняються ідеями та обчислювальними алгоритмами для отримання наступного значення розв’язку при tk+1 (рис. 5.1).

Рис. 5.1. Дискретизація часової координати
Розглянемо стисло деякі характерні та найбільш поширені приклади таких методів, розпочавши з їх класифікації. В науковій літературі [11] застосовується наступна класифікація:
1. Багато етапні чисельні методи, в яких отримання розв’язку при tk+1 складається з декількох етапів – повторних розрахунків чи ітераційних обчислень на кожному кроці інтегрування за часом;
2. Багато крокові чисельні методи, в яких для отримання розв’язку при tk+1 потрібно використовувати значення розв’язків для декількох попередніх моментів часу tk, tk-1, tk-2,…;
3. Мінімізаційні чисельні методі, в яких для отримання розв’язку при tk+1 використовують не вихідні диференціальні рівняння, а умови мінімуму певних функціоналів, зв’язаних з даною задачею Коші.
Менш поширеними через складність та трудомісткість є так звані блочні методи, у яких відразу розраховуються блок значень розв’язків у точках tk, tk+1, tk+2,…, tk+s; та гібридні методи, як поєднання в одному алгоритмі складових різних методів.
Типовим диференціальним рівнянням в задачах Коші для механіки і БМК зокрема є наступне диференціальне рівняння другого порядку
 ,
(5.1)
,
(5.1)
де u(t) – динамічне переміщення, M – маса динамічної системи, Λ – коефіцієнт демпфірування, K – коефіцієнт жорсткості пружного зв’язку і f(t) – задана збуджуюча сила.
Такі
диференціальні рівняння можуть утворювати
й системи рівнянь відносно вектора
динамічних переміщень
 з матричними коефіцієнтами M,
Λ,
K
та
вектором збуджуючих сил
з матричними коефіцієнтами M,
Λ,
K
та
вектором збуджуючих сил
 ,
зокрема при застосування МСЕ чи МСР до
динамічних задач для пружних конструкцій.
,
зокрема при застосування МСЕ чи МСР до
динамічних задач для пружних конструкцій.
Початкові умови на переміщення та швидкість динамічної системи формулюються при t=t0 як u(t0)=u0, du/dt(t0)=v0. Часто у якості t0 приймають значення t0=0.
З іншого погляду, в обчислювальній математиці використовують дещо іншу загальну форму запису диференціальних рівнянь, зокрема для рівнянь другого порядку маємо [11, 14]
 ,
(5.2)
,
(5.2)
де
у зв’язку з диференціальним рівнянням
(5.1) права частина запишеться як
 .
.
Рівняння (5.2) можна про інтегрувати два рази на інтервалі [tk, tk+1], застосувавши метод інтегрування частинами, так що отримаємо два еквівалентні інтегральні рівняння виду
 (5.3)
(5.3)
де, нагадаємо, розв’язок при tk вважається відомим.
Розпочнемо огляд чисельних методів з найбільш простого та прозорого методу, запропонованому ще Л. Ейлером . Згідно даному методу значення розв’язку u(tk+1)=uk+1 визначається за допомогою відрізку ряду Тейлора (див. рис. 5.2)
 .
(5.4)
.
(5.4)
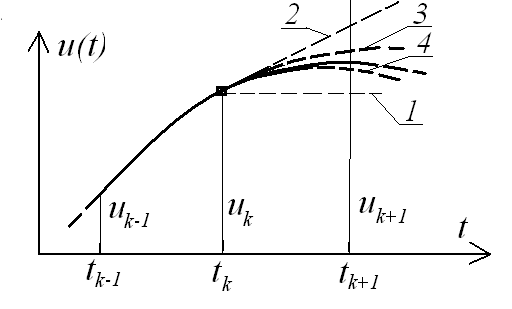
Рис. 5.2. Графічне зображення апроксимації розв’язку відрізками ряду Тейлора (цифрами показано кількість членів ряду (5.4))
Рівняння
(5.2) визначає тільки другу похідну від
шуканого розв’язку, але якщо функція
 аналітична і достатньо проста, то можна
операціями інтегрування та диференціювання
отримати й інші похідні у ряді (5.4) і,
таким чином, отримати достатньо хороше
наближення для розв’язку у точці tk+1.
Нажаль, у більшості практичних задач
функція
є складною, або взагалі її явний вигляд
невідомий і вона розраховується тільки
із застосуванням чисельних процедур,
і це суттєво обмежує можливості широкого
застосування метода Ейлера у практиці
чисельних розрахунків задач Коші. Через
це, а також через потреби досягнення
якомога вищої точності, стійкості та
ефективності обчислювальних алгоритмів
і було розроблено потужний арсенал
чисельних методів для задач Коші [11,
14].
аналітична і достатньо проста, то можна
операціями інтегрування та диференціювання
отримати й інші похідні у ряді (5.4) і,
таким чином, отримати достатньо хороше
наближення для розв’язку у точці tk+1.
Нажаль, у більшості практичних задач
функція
є складною, або взагалі її явний вигляд
невідомий і вона розраховується тільки
із застосуванням чисельних процедур,
і це суттєво обмежує можливості широкого
застосування метода Ейлера у практиці
чисельних розрахунків задач Коші. Через
це, а також через потреби досягнення
якомога вищої точності, стійкості та
ефективності обчислювальних алгоритмів
і було розроблено потужний арсенал
чисельних методів для задач Коші [11,
14].
Звернемося тепер до багато етапних методів і розглянемо два представники з даної множини методів – метод Неймарка і метод Рунге-Кутта. Для цього у ряді (5.4) утримаємо тільки перші три члени і перепишемо його в узагальненому вигляді
 (5.5)
(5.5)
де v, a1 та a2 – певні коефіцієнти ряду, різні для різних методів.
У
методі Неймарка для коефіцієнта швидкості
v
приймається значення ,
а коефіцієнти прискорень a1
та a2
визначаються як лінійні інтерполяції
для значень
,
а коефіцієнти прискорень a1
та a2
визначаються як лінійні інтерполяції
для значень
 та
та
 .
Таким чином, маємо розрахункові залежності
.
Таким чином, маємо розрахункові залежності
 (5.6)
(5.6)
де інтерполяційні множники β та γ загалом є довільними. В практиці розрахунків конкретних задач їх потрібно підбирати тестовими розрахунками, але досить часто беруть значення β=γ=1/2.
Як
видно з формул (5.6), метод Неймарка можна
реалізувати тільки у схемі повторних
рекурентних розрахунків, оскільки
значення переміщень, швидкостей та
прискорень при tk+1
стоять як у лівій, так і у правій частині
розрахункових формул і на першому етапі
вони невідомі. Тому спочатку у правій
частині формул у (5.6) значення
 приймають наближено тільки для точки
tk,
отримують їх першу оцінку для tk+1
за даними формулами, яку потім підставляють
у праву частину формул (5.6) і далі уточнюють
оцінку повторними ітераційними
процедурами. Якщо процес збігається,
то повторні розрахунки припиняють і
переходять до наступного моменту часу
tk+2.
Через рекурентні обчислення на кожному
кроці за часом його й відносять до багато
етапних методів.
приймають наближено тільки для точки
tk,
отримують їх першу оцінку для tk+1
за даними формулами, яку потім підставляють
у праву частину формул (5.6) і далі уточнюють
оцінку повторними ітераційними
процедурами. Якщо процес збігається,
то повторні розрахунки припиняють і
переходять до наступного моменту часу
tk+2.
Через рекурентні обчислення на кожному
кроці за часом його й відносять до багато
етапних методів.
Метод Неймарка через свою простоту та прозорість досить широко використовують у практиці чисельних розрахунків задач Коші і він загалом показав достатню точність, стійкість та ефективність при обчисленнях. Крім того, його можна використовувати від першого кроку за часом, маючи тільки початкові значення u0, v0. Недоліком методу слід вважати невизначеність вагових множників та значний обсяг обчислень при повільній збіжності результатів рекурентних розрахунків.
Іншим
широко відомим представником даної
множини методів є метод Рунге-Кутта.
Метод побудовано на тому, що коефіцієнти
ряду (5.5) розраховують із використанням
значень розв’язку як у точках tk
та tk+1,
таку і у деякій проміжній точці на
інтервалі [tk;
tk+1],
зокрема при tk+1/2=tk+Δt/2.
Такий алгоритм виник через те, що ще на
початку 20-го століття спочатку Рунге
та потім незалежно Кутта спробували
визначити невідому першу похідну у ряді
Тейлора (5.4) через відому другу похідну
(згідно рівняння (5.2)) з використанням
певних вагових множників та проміжних
точок за часом на інтервалі [tk;
tk+1].
Тобто
 ,
де сj
є вагові множники, а (tk+vjΔt)
(vj<1,
в основному vj=1/2)
є проміжні точки за часом. Оскільки
підбір даних множників можна виконувати
різними способами, то існує низка
варіантів даного методу і, як приклад,
наведемо 4-х етапний метод у вигляді
[14]
,
де сj
є вагові множники, а (tk+vjΔt)
(vj<1,
в основному vj=1/2)
є проміжні точки за часом. Оскільки
підбір даних множників можна виконувати
різними способами, то існує низка
варіантів даного методу і, як приклад,
наведемо 4-х етапний метод у вигляді
[14]
 ,
( 5.7)
,
( 5.7)
де
верхнім індексом «с» позначено скориговане
значення для
 .
.
Як і метод Неймарка, даний метод також може «стартувати» з початкових умов, має високі показники стійкості та точності і досить широко використовується у практиці розрахунків, а недоліком методу слід вважати великий обсяг обчислень на кожному кроці за часом у задачах зі складними та трудостісткими алгоритмами для обчислень правої частини диференціальних рівнянь типу (5.2) (наприклад, у задачі про нелінійну хитавицю суден).
Р озглянемо
далі багато крокові методи, зокрема
сімейство чисельних методів
Адамса,
у яких використовується інтегральна
версія вихідних диференціальних рівнянь
типу (5.3). Ідея методу полягає у тому, що
для розрахунку інтегралів у (5.3)
підінтегральні вирази апроксимуються
інтерполяційними поліномами «назад»
для певної множини точок за часом tk,
tk-1,
tk-2,…,
tk-s,
s=1,2,3…
.
Може бути задіяна для інтерполяції і
точка tk+1,
але тоді, як і у методі Неймарка, потрібно
застосовувати додатково рекурентні
розрахунки, оскільки невідомі розв’язки
при tk+1
будуть
як у лівій, так і у правій частині
розрахункових формул. Наприклад, при
лінійній інтерполяції для точок tk,
tk-1
маємо
озглянемо
далі багато крокові методи, зокрема
сімейство чисельних методів
Адамса,
у яких використовується інтегральна
версія вихідних диференціальних рівнянь
типу (5.3). Ідея методу полягає у тому, що
для розрахунку інтегралів у (5.3)
підінтегральні вирази апроксимуються
інтерполяційними поліномами «назад»
для певної множини точок за часом tk,
tk-1,
tk-2,…,
tk-s,
s=1,2,3…
.
Може бути задіяна для інтерполяції і
точка tk+1,
але тоді, як і у методі Неймарка, потрібно
застосовувати додатково рекурентні
розрахунки, оскільки невідомі розв’язки
при tk+1
будуть
як у лівій, так і у правій частині
розрахункових формул. Наприклад, при
лінійній інтерполяції для точок tk,
tk-1
маємо
 ,
де
,
де
 ,
,
 ,
а при квадратичній інтерполяції для
точок tk,
tk-1,
tk-2
відповідно
,
а при квадратичній інтерполяції для
точок tk,
tk-1,
tk-2
відповідно
 ,
де вже інтерполяційні поліноми мають
вигляд
,
де вже інтерполяційні поліноми мають
вигляд
 з тим же виразом для τ (рис. 5.3). Степеневі
функції легко інтегруються і тоді
інтегральні рівняння в (5.3) перетворюються
в алгебраїчні відносно вузлових значень
шуканих розв’язків. Тут також можна
отримати різні варіанти методів, зокрема,
якщо точка за часом tk+1
не
використовується, то утворюються так
звані явні
схеми Адамса-Бешфорта,
а якщо в інтерполяцію включено і точку
tk+1,
то
матимемо більш складні неявні
схеми Адамса-Мултона
[11].
з тим же виразом для τ (рис. 5.3). Степеневі
функції легко інтегруються і тоді
інтегральні рівняння в (5.3) перетворюються
в алгебраїчні відносно вузлових значень
шуканих розв’язків. Тут також можна
отримати різні варіанти методів, зокрема,
якщо точка за часом tk+1
не
використовується, то утворюються так
звані явні
схеми Адамса-Бешфорта,
а якщо в інтерполяцію включено і точку
tk+1,
то
матимемо більш складні неявні
схеми Адамса-Мултона
[11].

Рис. 5.3. Схеми інтерполяції (- - - - ) у методах Адамса; а) лінійна, б) квадратична інтерполяція
У якості приклада наведемо розрахункові формули для явної схеми з назвою «предиктор-коректор» [11]
 .
(5.8)
.
(5.8)
Як видно з розрахункових формул, у даному методі розрахунок виконується відразу за один етап, але при цьому потрібно мати розрахунки у попередніх точках за часом tk, tk-1, tk-2, tk-3 і це означає, що методи Адамса не можна використовувати, починаючи з граничних умов задачі. Тому при практичних застосуваннях даних методів спочатку для перших кроків за часом виконують розрахунки одним з багато етапних методів, а потім вже переходять на використання методів Адамса. Позитивною стороною даних методів є відносно менший обсяг розрахунків на кожному кроці, а негативною – неможливість застосування, починаючи відразу з граничних умов задачі.
Розглянемо
нарешті мінімізаційні чисельні методи
для задач Коші на прикладі методу
Куявського-Галагера як узагальненого
варіанту методу найменших квадратів.
У даному методі, як і у методах Адамса,
розв’язок інтерполюється поліномами
другого прядку на інтервалі [tk-1;
tk+1]
 .
Таким же чином інтерполюється і збуджуюча
сила
f(t).
.
Таким же чином інтерполюється і збуджуюча
сила
f(t).
Підстановка даного виразу у диференціальне рівняння (5.1) утворює похибку
 (5.9)
(5.9)
для якої визначається функціонал – сумарний квадрат похибки розв’язку на інтервалі [tk-1; tk+1]
 .
(5.10)
.
(5.10)
де W(t) – певна вагова функція, яка підбирається з умов точності та стійкості обчислювальної схеми.
Оскільки найкращий розв’язок забезпечується умовами мінімуму даного функціоналу, то шукане значення uk+1 визначається формулою
 .
(5.11)
.
(5.11)
Остаточно після необхідних математичних дій може бути отримана наступна обчислювальна схема
 (5.12)
(5.12)
де
 - вагові
коефіцієнти, які дорівнюють
- вагові
коефіцієнти, які дорівнюють
 ,
,
 (визначені з умов точності четвертого
порядку за кроком
Δt
та безумовної стійкості обчислювальної
схеми).
(визначені з умов точності четвертого
порядку за кроком
Δt
та безумовної стійкості обчислювальної
схеми).
Практичне застосування даного алгоритму у задачах нелінійної хитавиці суден на хвилях показало високий рівень стійкості результатів навіть при малому числі кроків за період коливань (порядку 10–15). Метод також можна застосовувати, починаючи з граничних умов задачі, але недоліком методу є відносно великий обсяг обчислень на кожному кроці за часом для задач зі складними алгоритмами розрахунків для коефіцієнтів та правої частини диференціальних рівнянь задачі.
На
завершення на рис (5.4) – (5.6) наведено
приклади чисельного інтегрування
диференціального рівняння
 (нелінійний осцилятор при α≠0) методами
Неймарка, Рунге-Кутта, Адамса-Бешфорта
та мінімізаційним методом Куявського-Галагера.
Крок за часом становив 1/10 від періоду
власних коливань осцилятора.
(нелінійний осцилятор при α≠0) методами
Неймарка, Рунге-Кутта, Адамса-Бешфорта
та мінімізаційним методом Куявського-Галагера.
Крок за часом становив 1/10 від періоду
власних коливань осцилятора.

Рис. 5.4. Вільні коливання лінійного осцилятора (при u0=1, v0=0, α=0, f0=0); метод Неймарка ( - - - - ), метод Рунге-Кутта (x—x), метод Адамса-Бешфорта (+—+), метод Куявського-Галагера (▲—▲), точний розв’язок (——)
Я к
видно з графіків коливань, після 50-го
кроку за часом у розв’язку за методом
Неймарка сформувався помітний фазовий
зсув, а у розв’язку за методом
Адамса-Бешфорта почала формуватися
нестійкість за амплітудами коливань
осцилятора. Інші чисельні розв’язки
добре узгоджуються з точним розв’язком.
к
видно з графіків коливань, після 50-го
кроку за часом у розв’язку за методом
Неймарка сформувався помітний фазовий
зсув, а у розв’язку за методом
Адамса-Бешфорта почала формуватися
нестійкість за амплітудами коливань
осцилятора. Інші чисельні розв’язки
добре узгоджуються з точним розв’язком.
Рис. 5.5. Вимушені коливання лінійного осцилятора (при u0=0, v0=0, α=0); метод Неймарка ( - - - - ), метод Рунге-Кутта (x—x), метод Адамса-Бешфорта (+—+), метод Куявського-Галагера (▲—▲), точний розв’язок (——)
Д ля
даного варіанту розрахунків з графіків
коливань видно, що після 50-го кроку за
часом у розв’язку за методом Неймарка
сформувалася помітна нестійкість за
амплітудами коливань та фазовий зсув,
а усі інші чисельні розв’язки досить
добре узгоджуються з точним розв’язком.
Відхилення за амплітудами у методі
Адамса-Бешфорта ледь помітні на даному
інтервалі за часом.
ля
даного варіанту розрахунків з графіків
коливань видно, що після 50-го кроку за
часом у розв’язку за методом Неймарка
сформувалася помітна нестійкість за
амплітудами коливань та фазовий зсув,
а усі інші чисельні розв’язки досить
добре узгоджуються з точним розв’язком.
Відхилення за амплітудами у методі
Адамса-Бешфорта ледь помітні на даному
інтервалі за часом.
Рис. 5.6. Вимушені коливання нелінійного осцилятора (при u0=1, v0=0,); метод Неймарка (- - -), метод Рунге-Кутта (x—x), метод Адамса-Бешфорта (+—+), метод Куявського-Галагера (▲—▲), аналітичний розв’язок (——)
Для нелінійних вимушених коливань осцилятора при застосуванні метода Адамса-Бешфорта сильна амплітудно-фазова нестійкість розпочалася вже після 10-го кроку за часом і така ж нестійкість почала формуватися при застосуванні метода Неймарка. Після 50-го кроку для решти двох методів маємо, що для метода Рунге-Кутта виник невеликий стабільний зсув за фазою, а метод Куявського-Галагера дав практично точне узгодження з аналітичним розв’язком.
Таким чином, майже кожний з використаних методів починає з певного кроку за часом накопичувати більші чи менші похибки у розв’язках у вигляді зсуву фази коливань чи розгойдування амплітуд (амплітудної нестійкості) і загалом це є типовим явищем для чисельних методів у задачах Коші. Швидке накопичення похибок чисельних розв’язків у наведених прикладах пов’язане у першу чергу із спеціально вибраним досить великим кроком за часом; в реальних розрахунках звичайно крок беруть значно меншим, щоб нестійкості з’являлися якомога пізніше. Тому і чисельних методів для задач Коші було розроблено достатньо багато з метою подолання проблем точності, нестійкості та обчислювальної ефективності для конкретних типів задач.