

2.2. Проекция силы на ось. Проекция векторной суммы сил на ось
Решение задач на равновесие сходящихся сил с помощью построения замкнутых силовых многоугольников сопряжено с громоздкими построениями. Универсальным методом решения таких задач является переход к определению проекций заданных сил на координатные оси и оперирование с этими проекциями. Осью называют прямую линию, которой приписано определенное направление.
Проекция вектора на ось является скалярной величиной, которая определяется отрезком оси, отсекаемым перпендикулярами, опущенными на нее из начала и конца вектора.
Проекция вектора считается положительной, если направление от начала проекции к ее концу совпадает с положительным направлением оси. Проекция вектора считается отрицательной, если направление от начала проекции к ее концу противоположно положительному направлению оси.
Таким образом, проекция силы на ось координат равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси.
Рассмотрим ряд случаев проецирования сил на ось.
Вектор
силы F
(рис. 2.2) составляет с положительным
направлением оси х острый угол![]() .
.
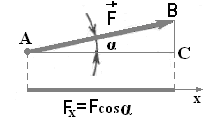
Рис. 2.2
Чтобы найти проекцию, из начала и конца вектора силы опускаем перпендикуляры на ось oх; получаем
Fx = F cos α
Проекция вектора в данном случае положительна
Сила F (рис. 2.3) составляет с положительным направлением оси х тупой угол α.
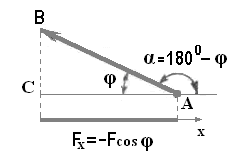
Рис. 2.3
Тогда Fx = F cos α, но так как α = 1800 - φ,
Fx = Fcos α = Fcos1800 - φ =- Fcos φ.
Проекция силы F на ось oх в данном случае отрицательна.
Сила F (рис. 2.4) перпендикулярна оси oх.
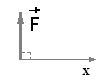
Рис. 2.4
Проекция силы F на ось х равна нулю
Fx = F cos 90° = 0.
Силу, расположенную на плоскости хоу (рис. 2.5), можно спроектировать на две координатные оси ох и оу.
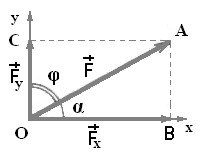
Рис. 2.5
Силу F можно разложить на составляющие: Fx и Fy. Модуль вектора Fx равен проекции вектора F на ось ox, а модуль вектора Fy равен проекции вектора F на ось oy.
Из ΔОАВ: Fx=F cos α, Fx=F sin α.
Из ΔОАС: Fx=F cos φ, Fx=F sin φ.
Модуль
силы
![]() можно найти по теореме Пифагора:
можно найти по теореме Пифагора:
![]()
![]() .
.
Проекция векторной суммы или равнодействующей на какую-либо ось равна алгебраической сумме проекций слагаемых векторов на ту же ось.
Рассмотрим сходящиеся силы F1, F2, F3, и F4, (рис. 2.6, а). Геометрическая сумма, или равнодействующая, этих сил F определяется замыкающей стороной силового многоугольника
![]()
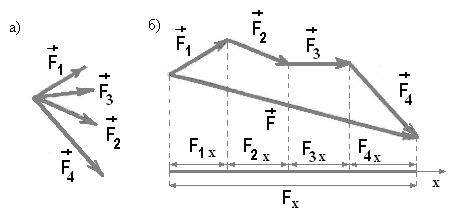
Рис. 2.6
Опустим из вершин силового многоугольника на ось x перпендикуляры.
Рассматривая полученные проекции сил непосредственно из выполненного построения, имеем:
F= F1x+F2x+F3x+ F4x
или
![]() ,
,
где n ‑ число слагаемых векторов. Их проекции входят вышеуказанное уравнение с соответствующим знаком.
В плоскости геометрическую сумму сил можно спроецировать на две координатные оси, а в пространстве – соответственно на три.
2.3. Условие равновесия плоской системы сходящихся сил
При равновесии системы сил равнодействующая должна быть равна нулю, следовательно, при геометрическом построении конец последнего вектора должен совпасть с началом первого (рис. 2.7).
Если плоская система сходящихся сил находится в равновесии, многоугольник сил этой системы должен быть замкнут.
Если в системе три силы, образуется треугольник сил.
![]()
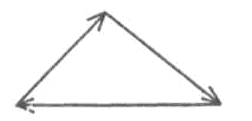
Рис. 2.7
При аналитическом способе определения равнодействующей условие равновесия, означающее равенство нулю равнодействующей, принимает следующую форму:
![]() .
.
FΣ = 0.
Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
Следовательно, условие равновесия выглядит следующим образом:
Fx=0;
Fy=0.
В задачах координатные оси выбирают так, чтобы решение было наиболее простым. Желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат.