

17 Самостійна робота №16
Тема: Побудова планів швидкостей і прискорень кулісних механізмів
Питання, що розглядаються
1. Призначення та структура кулісних механізмів
2. Особливості визначення кінематичних параметрів кулісних механізмів
3. Розв’язування задачі.
Кулісні механізми достатньо широко представлені в техніці, зокрема в приводах верстатів, де обертовий рух перетворюється в зворотно-поступальний рух-стругальні, довбальні, плоскошліфувальні верстати та інші. Кулісою називається рухома направляюча, яка здійснює обертовий рух (коливальний). Схема кулісного механізму наведена на рисунку 1.
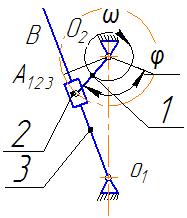
Рисунок 1-схема кулісного механізму
1-кривошип, 2-повзун (кулісний камінь), 3-куліса.
Особливість кінематичного розрахунку кулісних механізмів полягає в тому, що кулісний камінь здійснює складний рух, причому в якості переносного руху маємо обертовий рух куліси. Тоді абсолютне прискорення дорівнює векторної сумі переносного, відносного та Коріолісова прискорень.
Приклад. В кулісному механізмі О2А=100мм, О1О2=245мм, кутова швидкість ведучої ланки ω=12с-1. Визначити швидкість точки В куліси в заданому положенні механізму при φ=30°.
Розв’язок.
Креслимо план кулісного механізму в масштабі
![]()
Визначаємо швидкість точки А в обертовому русі навколо точки О1:
![]()
Точка А3 здійснює складний рух, який складається з переносного руху разом з кулісою 3 та відносного руху вздовж куліси. З іншого боку, швидкість точки А3 можна розглянути як векторну суму швидкості полюсу VО1 та швидкості обертання точки А3 навколо точки О1- VА3О1.
Швидкість точки А3 куліси, яка співпадає із швидкістю кулісного каменю А2 визначається з векторних рівнянь:
VА3= VО1+ VА3О1 (1)
VА3= VА1+ VА1А3 (2)
![]() - швидкість
точки А3 куліси в обертовому русі
відносно точки О1.
- швидкість
точки А3 куліси в обертовому русі
відносно точки О1.
![]() - швидкість
точки А2 каменю в поступальному русі
відносно точки А3 куліси.
- швидкість
точки А2 каменю в поступальному русі
відносно точки А3 куліси.
В цих рівняннях швидкість VА1 відома за величиною та напрямком, VО1=0. Відносні швидкості VА3О1 та VА1А3 відомі лише за лінією напрямку: VА3О1 спрямована перпендикулярно до ланки 3в заданому положенні,
а вектор швидкості VА1А3 спрямований вздовж ланки 3. Тому для визначення швидкості точки розв’язуємо систему рівнянь (1), (2) графічним способом (методом побудови плану швидкості).
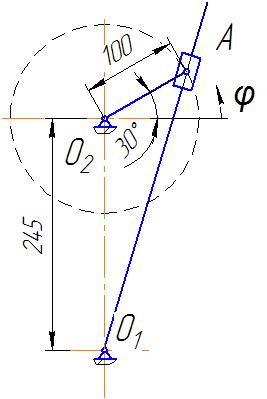
Рисунок 2- схема кулісного механізму в масштабі
Креслимо план швидкостей. Для цього задаємося довжиною відрізка ра, який буде зображувати на плані швидкостей швидкість точки VА, розраховуємо масштаб плану швидкостей
![]()
від довільної точки р, яку прийнято за полюс, відкладаємо перпендикуляр до ланки 1 в напрямку обертання і ньому відрізок ра=60мм.
Через точку а плану швидкостей (кінець вектора ра) проводимо лінію, яка паралельна до ланки 3, а через полюс р лінію, яка перпендикулярна ланці 3. На перетину цих напрямків отримаємо точку в - кінець вектора абсолютної швидкості точки А3 куліси.
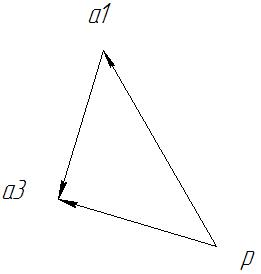
Рисунок
3 – план швидкостей кулісного механізму
в масштабі
![]()
З плану швидкостей визначаємо:
VA3=ра3·μv=43,6·0,02=0,872м/с
Визначаємо прискорення точки А1:
![]()
Прискорення точки А3 куліси можна знайти, розв’язавши систему векторних рівнянь шляхом побудови плану прискорень
![]() (3)
(3)
![]() (4)
(4)
В рівняннях (3), (4)
![]() прискорення
нерухомої точки стійки;
прискорення
нерухомої точки стійки;
![]() нормальне
прискорення точки А3 навколо точки О1,
нормальне
прискорення точки А3 навколо точки О1,
![]()
Для
плану прискорень вибираємо довжину
відрізка πа=15мм, який зображує прискорення
точки А в масштабі μа=
![]() .
В цьому масштабі довжина відрізка, який
зображує вектор нормального прискорення
.
В цьому масштабі довжина відрізка, який
зображує вектор нормального прискорення
![]()
![]()
![]() прискорення
Коріоліса,
прискорення
Коріоліса,
Модуль прискорення Коріоліса дорівнює
![]()
де кутова швидкість куліси
![]()
Відносна швидкість з плану швидкостей
![]()
![]()
В обраному масштабі довжина відрізка, який зображує вектор прискорення Коріоліса
![]()
Напрямок прискорення Коріоліс визначається напрямком векторного добутку векторів ω і Vr, тобто прискорення Коріоліса буде направлено перпендикулярно площині, що проходить через вектори ω і Vr, в той бік, звідки найкоротший перехід від ω до видно, що проходять проти ходу стрілки годинника. Або за правилом Жуковського М.Є. проекцію відносної швидкості Vr на площину, перпендикулярну кутовій швидкості ω слід повернути на кут 90° навколо ω в напрямку обертання.
Будуємо план прискорень.
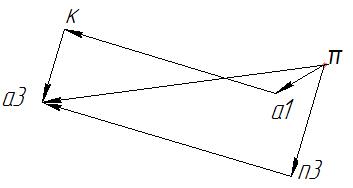
Рисунок
4- План прискорень в масштабі
![]()
З плану
прискорень визначаємо
![]()
Визначаємо кутове прискорення ланки 3
![]()
Завдання. Визначити лінійні та кутові швидкості та прискорення точок та ланок кулісного механізму в заданому положенні кривошипу φ.
Таблиця 1-Вихідні дані
Варіант |
φ, град |
ω1, с-1 |
О1О2, мм |
О2А, мм |
1 |
15 |
330 |
350 |
130 |
2 |
20 |
400 |
370 |
120 |
3 |
25 |
300 |
380 |
125 |
4 |
33 |
310 |
400 |
170 |
5 |
65 |
450 |
450 |
150 |
6 |
60 |
500 |
440 |
120 |
7 |
70 |
300 |
410 |
120 |
8 |
200 |
310 |
360 |
100 |
9 |
120 |
430 |
400 |
130 |
10 |
0 |
460 |
430 |
135 |
11 |
190 |
540 |
420 |
120 |
12 |
220 |
390 |
390 |
130 |
13 |
250 |
380 |
370 |
110 |
14 |
270 |
340 |
350 |
120 |
15 |
300 |
440 |
370 |
115 |
16 |
320 |
430 |
380 |
120 |
17 |
180 |
420 |
400 |
130 |
18 |
150 |
350 |
450 |
150 |
19 |
80 |
420 |
440 |
140 |
20 |
90 |
410 |
410 |
140 |
21 |
50 |
470 |
360 |
120 |
22 |
80 |
480 |
400 |
130 |
23 |
260 |
530 |
430 |
135 |
24 |
300 |
520 |
420 |
140 |
25 |
200 |
510 |
390 |
130 |
26 |
170 |
490 |
370 |
120 |
27 |
340 |
420 |
360 |
120 |
28 |
210 |
320 |
400 |
130 |
29 |
290 |
500 |
430 |
140 |
30 |
130 |
480 |
420 |
130 |