

7 .Восстановление уравнения движения (по заданному ускорению)
П![]() усть
задан вектор ускорения материальной
точки как функция времени
усть
задан вектор ускорения материальной
точки как функция времени
Тогда для dv получим
И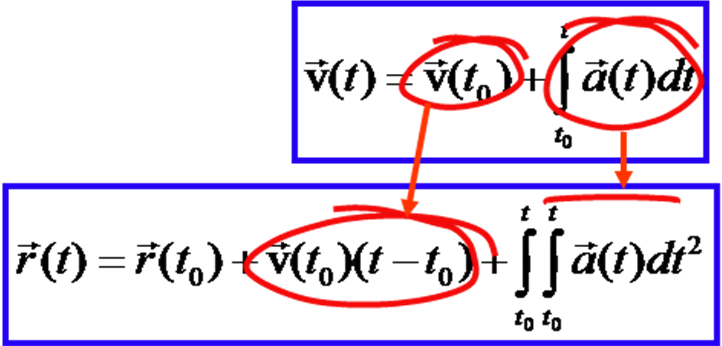 нтегрируя
это уравнение в пределах от начального
момента времени t0 до любого
текущего t, найдем,
где v(t0)
– вектор скорости в начальный момент
времени
нтегрируя
это уравнение в пределах от начального
момента времени t0 до любого
текущего t, найдем,
где v(t0)
– вектор скорости в начальный момент
времени
Теперь, для восстановления уравнения движения воспользуемся предыдущим результатом – получим уравнение траектории по заданной скорости
Таким образом для восстановления уравнения движения по заданному ускорению необходимо знать два параметра: начальное положение материальной точки и скорость в начальный момент времени
8.Преобразование Галилея
Возникает вопрос: как, получить описание движения частицы в СО K, имея результаты измерений, проведенных из СО K', движущейся относительно системы K с известной скоростью v0(t)?
Р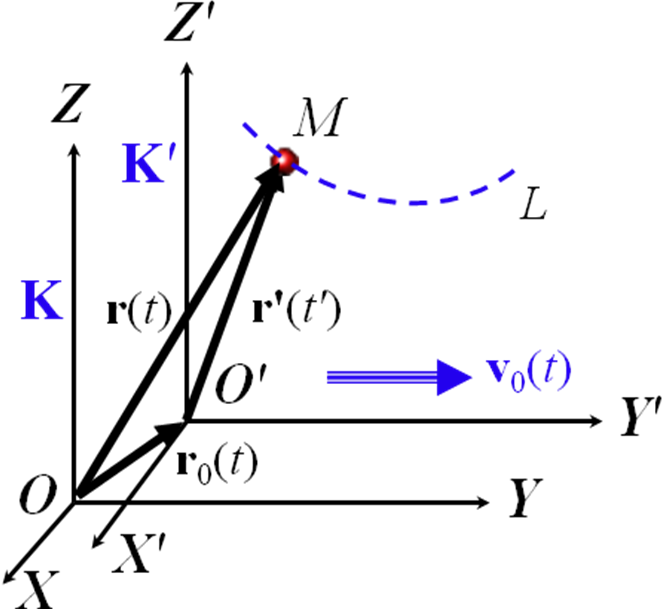 ассмотрим
движение некоторой материальной точки
из двух СО - K и K'
ассмотрим
движение некоторой материальной точки
из двух СО - K и K'
Радиус-вектор, соединяющий начала этих СО (точки O и O'), обозначим ro(t)
р![]() адиус-вектора
частицы относительно выбранных СО
обозначим r(t) и r'(t')
адиус-вектора
частицы относительно выбранных СО
обозначим r(t) и r'(t')
Очевидно
По определению, скорость – производная радиус вектора по времени
![]()
Таким образом видим, что для однозначного определения кинематических параметров, описывающих движение материальной точки относительно СО K, по измерениям, проведенным в СО K', необходимо знать связь моментов времени t и t0
В![]()
![]() классической механике проблема
взаимосвязи моментов времени в различных
СО решается постулатом Галилея
классической механике проблема
взаимосвязи моментов времени в различных
СО решается постулатом Галилея
М![]()
![]() оменты
времени в различных СО совпадают
с точностью до постоянной
величины, определяемой процедурой
синхронизации часов
оменты
времени в различных СО совпадают
с точностью до постоянной
величины, определяемой процедурой
синхронизации часов
О![]() бычно
считают часы синхронизированными таким
образом, что const = 0, то есть
бычно
считают часы синхронизированными таким
образом, что const = 0, то есть
При таком способе синхронизации из последнего уравнения несложно получить связь ускорений в произвольных СО, где ao - ускорение системы K0 относительно системы K
Эти уравнения называют преобразованиями Галилея для произвольных СО
С![]() реди
всех возможных СО особое место занимает
множество таких СО, которые относительно
друг друга движутся с постоянными
скоростями (т.е. их относительные
ускорения равны нулю)
реди
всех возможных СО особое место занимает
множество таких СО, которые относительно
друг друга движутся с постоянными
скоростями (т.е. их относительные
ускорения равны нулю)
Такие СО называют инерциальными системами отсчета (ИСО)
Н![]()
![]() айдем
преобразования Галилея для ИСО. Положение
начала ИСО K0 можно найти, как
уравнение движения, восстановленное
по известной скорости vo=const
, где
r0(t0)
- радиус-вектор начала
ИСО K' (т.е. точки O')
в начальный момент времени t0
айдем
преобразования Галилея для ИСО. Положение
начала ИСО K0 можно найти, как
уравнение движения, восстановленное
по известной скорости vo=const
, где
r0(t0)
- радиус-вектор начала
ИСО K' (т.е. точки O')
в начальный момент времени t0
Тогда, принимая t0= 0 и r0(t0) = 0, получим преобразования Галилея для ИСО
О![]() братим
особо внимание на последнее уравнение
в преобразованиях Галилея для ИСО,
которое означает, что ускорение
материальной точки во всех ИСО одинаково
братим
особо внимание на последнее уравнение
в преобразованиях Галилея для ИСО,
которое означает, что ускорение
материальной точки во всех ИСО одинаково
9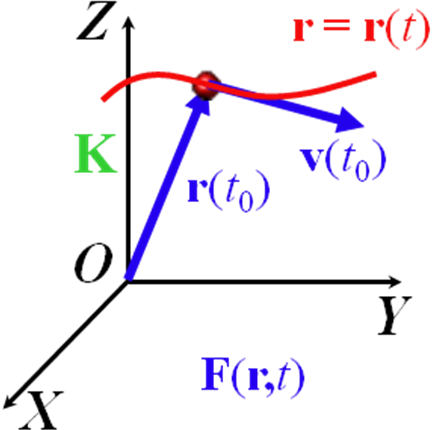 .
Динамика материальной точки – 1 Закон
Ньютона
.
Динамика материальной точки – 1 Закон
Ньютона
1 Закон Ньютона
СО, в которых закон движения однозначно определен, если заданы:- начальные условия r0=r(t0), v0=v(t0) - функция, описывающая взаимодействие с окружающей средой F(r,t) называют ИСО
Задача законов Ньютона – выяснить причины движения
ИСО существуют, как математическая абстракция реальных систем отсчета
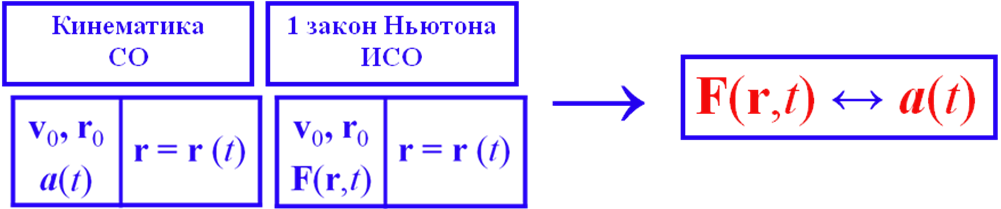
10. Динамика материальной точки – 2 Закон Ньютона
Сравним способы получения уравнений движения
Ф![]() ормулировка
2 закона
Ньютона: в ИСО взаимодействие
объекта с окружающей средой
вызывает ускорение объекта
, где m
- инертная масса тела, F(t)
- сила
ормулировка
2 закона
Ньютона: в ИСО взаимодействие
объекта с окружающей средой
вызывает ускорение объекта
, где m
- инертная масса тела, F(t)
- сила
в ИСО сила вызывает ускорение объекта
11. 3 Закон Ньютона
3 Закон Ньютона в общем случае является универсальным законом взаимодействий
Всякое действие вызывает равное по величине противодействие
Формулировка 3 закона Ньютона: При любом физическом взаимодействии, действие одного тела на другое вызывает равное по величине и противоположно направленное действие второго тела на первое
силы, связанные по 3 закону Ньютона, приложены к различным телам