

Исходное состояние выключателя
На рис. 4 все части автомата показаны в исходном ( отключенном ) состоянии. По-
ложение рукоятки 8 и “ломающихся” рычагов 10 и 12 обозначено пунктирными линиями. Под действием отключающей пружины 13 дугогасительный контакт 1 и подпружиненный подвижный главный контакт 3 разомкнуты.
Включение выключателя
Включить выключатель можно двумя способами:
вручную;
дистанционно.
При ручном
включении рукоятку
выключателя 8
поворачивают вокруг оси О![]() по
по
часовой стрелке до упора. При этом перемещаются дугогасительный контакт 1 и главный подвижный контакт 3.
Первым из них замкнется контакт 1 с расположенным напротив него подпружинен-
ным вторым вспомогательным контактом, вследствие чего через них образуется началь-
ная цепь тока:
верхний неподвижный контакт 3 – вспомогательные контакты 1 – перемычка ( жгу-
тик ) – нижний неподвижный контакт 3 – шунт 14 – катушка реле максимального тока 5.
Когда рукоятка 8 дойдет до упора, подвижный контакт 3 замкнется с неподвижны-
ми, вследствие ток станет протекать через главные контакты 3, минуя дугогасительные 1;
верхний и нижний неподвижные контакты 3 – шунт 14 – катушка реле максималь-
ного тока 5.
Ломающиеся рычаги 10 и 12 займут положение, обозначенное сплошной линией.
При дистанционном включении подается питание на катушку электромагнита 11, якорь которого перемещается и воздействует на рычаги 10 и 12 так же, как при ручном включении. После включения выключателя питание с катушки 11 снимается, однако вы-
ключатель остается включенням ( см. ниже “Механизм свободного расцепления”).
Отключение выключателя
Отключить выключатель можно тремя способами:
вручную;
дистанционно;
автоматически.
При ручном отключении рукоятку 8 резко переводять в положение “выключено”.
При движении рукоятки вначале разомкнутся главные контакты 3, поэтому ток
цепи станет протекать через дугогасительные контакты 1. Возникшая при этом дуга будет воздействовать на поверхность этих контактов, в то время как главные уже разомкнулись. Тем самым продлевается срок службы главных контактов. Дугогасительные контакты лег-
ко снимаются, поэтому их по мере обгорания быстро заменяют.
При дистанционном отключении подают питание на катушку 7 независимого рас-
цепителя. Этот расцепитель выполнен в виде реле напряжения, поэтому его якорь механи-
чески воздействет на привод, а через него – на рычаги 10 и 12. Автомат при этом отключа
ется.
На судах дистанционное отключение выключателей применяют в тех случаях, ко-
гда возникла аварийная ситуация и необходимо срочно отключить какой-либо приемник электроэнергии. Например, при пожаре в МО должны дистанционно отключаться вентиля
торы, а также масляные и топливные насосы, находящиеся в МО. Места дистанционного отключения, по Правилам Регистра, должны находиться вне шахты МО, чаще всего – на мостике и в коридорах рядом со входом в МО.
Автоматическое отключение возможно в трех случаях:
при коротком замыкании;
при перегрузке цепи;
при недопустимом снижении напряжения.
При коротком замыкании ток в катушке реле максимального тока 5 увеличивает-
ся до значения, при котором якорь реле механически воздействует на привод выключате-
ля.
Последний мгновенно ( без выдержки времени ) отключает выключатель.
При перегрузке цепи увеличивается ток в шунте 14 и падение напряжения на нем. Это напряжение снимается на нагревательный элемент , вследствие чего биметалличе-
ская пластина изгибается и механически воздействует на привод выключателя. Последний отключает выключатель с выдержкой времени, обратно пропорциональной квадрату тока ( см. “Тепловые реле” ).
.
При недопустимом снижении напряжения в сети якорь реле минимального на-
пряжения 6 отпадает и механически воздействует на привод выключателя. Последний от-
ключает выключатель мгновенно.
Рассмотрим некоторые ответственные узлы выключателей более подробно. К та-
ким узлам относятся:
механизм свободного расцепления, а также расцепители:
максимальный;
минимальный;
независимый;
комбинированный.
Механизм свободного расцепления
Механизмом свободного расцепления называют кинематическую систему, предна-
значенную для выполнения двух функций:
моментное отключение выключателя;
исключение возможности удержания контактов во включенном положении с
помощью привода при ненормальных режимах работы защищаемой цепи.
Под моментным отключением выключателя понимают размыкание его контактов с большой скоростью, не зависящей от скорости движения привода.
Под ненормальными режимами работы цепи понимают короткое замыкание в ней,
перегрузку цепи по току и недопустимое снижение напряжения.
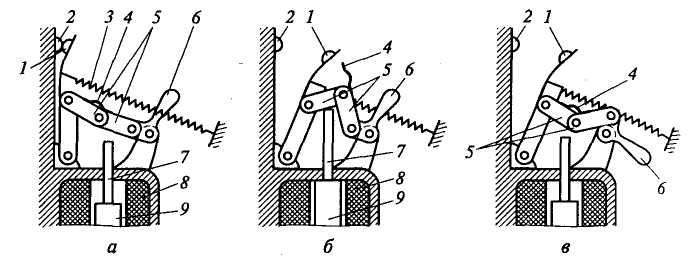
Рис. 5. Механизм свободного расцепления: а - исходное состояние; б – положение “включено”; в - положение “выключено автоматически”; 1 – подвижный контакт; 2 – не-
подвижный контакт; 3 – отключающая пружина расцепителя; 4 – упор; 5 - “ломающиеся” рычаги; 6 – рукоятка автоматического выключателя; 7 – шток; 8 – катушка электромагни-
та; 9 – якорь
Сам механизм свободного расцепления представляет собой систему шарнирно-свя-
занных рычагов 5 , соединяющих привод включения ( рукоятку ) 6 с подвижным контак
том 2, который соединен с отключающей пружиной 3.
Катушка 6 электромагнита включена последовательно в цепь главных контактов автомата 1 и 2, через которые проходит рабочий ток потребителя, например, двигателя.
В верхнем роложении рукоятки 6 ( рис. 5, а ) автомат включен, его контакты 1 и 2 замкнуты и удерживаются в таком состоянии рычагами 5, соединенными шарнирно, и упора 4; при этом пружина 3 растянута.
При коротком замыкании в сети или в устройстве, получающем питание через главные контакты автомата, ток в катушке 8 достигает значения, при котором якорь 9 выталкивается вверх и своим штоком 7 ударяет по рычагам 5, «переламывая» их в шар
нире.
Пружина 3, лишенная упора рычагами 5, сжимается и размыкает контакты 1 и 2
( рис. 5, б ). До тех пор, пока ток в катушке 8 не снизится до значения менее уставки автомата, шток 7 не допустит включения автомата.
После устранения короткого замыкания автомат следует включить. Для этого рукоятку 6 необходимо отвести вниз ( рис. 5, в ), при этом рычаги 5 выпрямятся, а упор 4 будет удерживать их в таком состоянии. Затем рукоятку следует перевести в верхнее положение, при котором контакты 1 и 2 замкнутся, а пружина 3 останется натянутой.
В некоторых типах автоматов возможно дистанционное управление ( т.е. вклю-
чение и отключение автомата ) посредством электромагнита или электродвигателя. В этом случае включение и отключение автомата выполняется кнопками «Пуск» и «Стоп» ( красного цвета ).
В автоматических выключателях отечественного производства, например, выклю
чателях типа АК-50 ( А – автоматический выключатель, К – Курский завод-изготови-
тель, 50 – значение номинального тока ( А ), наибольшего в серии выключателя ), при коротком замыкании рукоятка 8 устанавливается в среднее положение, что позволяет судовому электромеханику быстро найти выключатель, отключившийся автоматически.
В случае автоматического выключения автомат разрешается включить повторно
только в случае его ложного срабатывания ( Правила технической эксплуатации мор-
ских и речных судов. Электрооборудование. КНДЗ 31.2.002.07-96 ). Однако на практике не всегда можно определить истинную причину отключения выключателя. Поэтому электромеханики обычно поступают так ( чего делать, в соответствии с ПТЭ нельзя ): повторно включают выключатель; если же он вновь выключится, тогда его не включа-
ют до тех пор, пока не будет найдена и устранена причина его отключения.