

§ 3.4. Регулирование скорости двигателя с параллельным возбуждением
Существует 3 способа регулирования скорости двигателя с параллельным возбуж
дением:
введения резисторов в цепь обмотки якоря ( реостатное регулирование );
ослаблением магнитного потока;
шунтированием обмотки якоря.
Четвертый способ регулирование скорости - изменением напряжения на обмотке яко
ря такого двигателя недопустим, т.к. для этого надо изменять напряжение судовой сети.
При этом нарушится нормальная работа остальных приемников электроэнергии - других электродвигателей, нагревательных и осветительных приборов, а также систем судовой автоматики.
Такое регулирование применяют для двигателей с независимым возбуждением в си-
стемах генератор – двигатель ( см. ниже, §****), в которых упомянутый двигатель получает питание не от сети, а от отдельного ( персонального ) генератора постоянного тока.
Реостатное регулирование скорости электродвигателя постоянного тока с
параллельным возбуждением
Реостатным называется регулирование скорости путём введения резисторов в цепь обмотки якоря ( рис. 30 ).
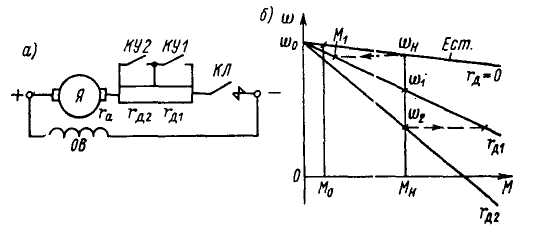
Рис. 30. Схема включения ( а ) и механические характеристики двигателя
параллельного возбуждения при реостатном регулировании
При объяснении каждого способа регулирования принимается, что до начала регу-
лирования двигатель работет на естественной механической характеристике со скоростью ω и развивает электромагнитный момент М .
Пусть двигатель работает на естественной механической характеристике со скоро-
стью ω . При этом ЭДС обмотки якоря, ток якоря и электромагнитный момент имеют номинальные значения, а именно: Е = k ω Ф, ток якоря I = ( U - E ) / R , М =
= k
I![]() Ф
= М
( М
-
статический момент
механизма).
Ф
= М
( М
-
статический момент
механизма).
При размыкании контакта
контактора ускорения КУ1 в цепь якоря
вводится первая ступень резистора г
,
по инерции скорость скорость и ЭДС,
пропорциональная скорости, не изменяются,
но ток скачком уменьшается до значения
I
=
( U
- E
)
/ ( R
+
r![]() ).
).
Уменьшение тока приводит
к уменьшению момента двигателя до
значения М![]() .
Таким
образом, прежнее равновесие между
вращающим моментом двигателя М
и
тормоз-
.
Таким
образом, прежнее равновесие между
вращающим моментом двигателя М
и
тормоз-
ным моментом механизма M нарушилось: тормозной момент стал больше вращающе-
го. Поэтому скорость двигателя начинает падать.
Уменьшение скорости со вызовет уменьшение ЭДС Е = k*Ф* ω, поэтому ток яко-
ря и электромагнитный момент М увеличиваться.
По достижении скорости ω возрастающий электромагнитный момент двигателя М уравняется со статическим M , наступит установившийся режим работы с постоянной скоростью ω ( т.е. скорость двигателя перестанет увеличиваться ).
Этот
режим будет сохраняться до тех пор, пока
не разомкнётся контакт второго контактора
ускорения КУ2, вводя дополнительно
в цепь якоря вторую ступень резистора
г![]() .
Далее процесс повторяется и заканчивается
в точке со скоростью ω
.
.
Далее процесс повторяется и заканчивается
в точке со скоростью ω
.
Таким образом, реостатное регулирование изменяет скорость двигателя вниз от основной, причём с увеличением сопротивления резисторов скорость падает.
Регулирование неэкономично из-за больших тепловых потерь в резисторах. Тем не менее этот способ регулирования - основной в электроприводах якорно-швартовных и грузоподъёмных механизмов на постоянном токе.
Регулирование скорости электродвигателя постоянного тока параллельного возбуждения ослаблением магнитного потока
При этом способе регулирования в цепь параллельной обмотки возбуждения вклю-
чают добавочный резистор r , что приводит к уменьшению (ослаблению) магнитного потока, скорость при этом увеличивается ( рис. 31 ).
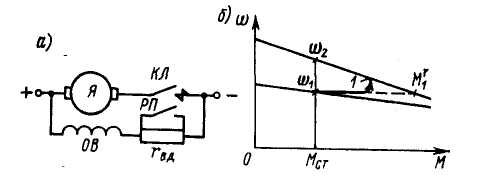
Рис. 31. Схема включения ( а ) и механические характеристики ( б ) двигателя параллельного возбуждения при ослаблении магнитного потока
Пусть двигатель работает на естественной механической характеристике со скоро-
стью ω = ω . При этом ЭДС обмотки якоря, ток якоря и электромагнитный момент име-
ют номинальные значения, а именно: Е = k*Ф* ω , ток якоря I = ( U - E ) / R ,
М = k * I *Ф = М ( М - момент механизма).
При
размыкании контакта РП в цепь обмотки
возбуждения вводится резистор
r![]() ,
по инерции скорость не изменяется, но
ЭДС обмотки якоря Е
=
k*Ф*
ω
уменьшается
за счёт уменьшения тока возбуждения и
магнитного потока Ф. Уменьшение
ЭДС приводит к увеличению тока якоря,
а значит, и электромагнитного
момента М до значения М'
.
,
по инерции скорость не изменяется, но
ЭДС обмотки якоря Е
=
k*Ф*
ω
уменьшается
за счёт уменьшения тока возбуждения и
магнитного потока Ф. Уменьшение
ЭДС приводит к увеличению тока якоря,
а значит, и электромагнитного
момента М до значения М'
.
Двигатель начинает разгоняться, увеличение скорости со приводит к увеличению ЭДС Е , что вызовет уменьшение тока якоря и момента до значения М = М . Разгон дви
гателя закончится при скорости двигателя ω > ω .
В этой точке ток якоря двигателя больше номинального во столько раз, во сколько раз новое значение магнитного потока меньше номинального. Это следует из того, что электромагнитный момент М = k *I *Ф в точках со скоростями ω и ω одинаков:
М = М .
Но момент в точке со скоростью ω получен при ослаблении магнитного потока в n раз, значит, чисто алгебраически, чтобы произведение не изменилось, ток якоря должен увелиситься в n раз.
Например, при ослаблении магнитного потока в 2 раза ( до значения 0,5 Ф н ) ток якоря увеличится в 1 / 0,5 = 2 раза.
Таким образом, этот способ регулирования имеет 2 недостатка:
регулирование скорости возможно только в сторону увеличения по отношению к номинальной;
при регулировании увеличивается ток якоря.
Вместе с тем, регулирование плавное и экономичное из-за небольших тепловых потерь в регулировочном резисторе (обычно ток возбуждения в десятки раз меньше номи
нального тока якоря).
Этот способ регулирования применяют в электроприводах грузовых лебёдок для получения высоких скоростей перемещения холостого гака и в электроприводах якорно-швартовных устройств для перемещения свободного ( не набитого ) швартовного каната..
Регулирование скорости электродвигателя постоянного тока параллельного возбуждения шунтированием обмотки якоря
При этом способе регулирования используют два резистора ( рис. 32 ):
1.
резистор r![]() ,
включенный параллельно обмотке якоря
Я ( шунтирующий обмотку якоря );
,
включенный параллельно обмотке якоря
Я ( шунтирующий обмотку якоря );
2.
резистор r![]() ,
включенный последовательно с обмоткой
якоря.
,
включенный последовательно с обмоткой
якоря.
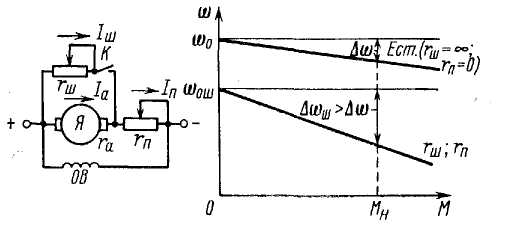
Рис. 32. Схема включения ( а ) и механические характеристики ( б ) двигателя при шунтировании обмотки якоря
Такой способ регулирования применяют для получения т.н. ползучих характери-
стик, позволяющих получить малые скорости двигателя.
Этот способ на судах получил ограниченное применение, в основном, в электропри-
водах брашпилей, для получения малых ( «ползучих» ) скоростей при выбирании якоря.
Работу схемы на рис. 32 можно описать системой из 3-х уравнений и формулы электромагнитного момента, Первое и второе из уравнений составлено на основнии 2-го закона Кирхгофа, а 3-е – 1-го закона Кирхгофа.
U = I r + I r ; ( 1 )
I r = kω + I r ; ( 2 )
I = I + I ; ( 3 )
М = k I ( 4 ).
Решая эту систему относительно скорости ω, получим уравнения искусственной механической характеристики
ω
=
![]()
![]() -
-
![]()
 М, (
2.25 )
М, (
2.25 )
где = ω - скорость идеального холостого хода;
М = Δω – перепад скорости,
причем оба параметра соответствуют обычной схеме включения двигателя ( без
резисторов r и r ).
Подставим формулы для ω и Δω в уравнение 2.25, получим
ω
= ω
-
Δω
 М (
2.26 )
М (
2.26 )
Для упрощения уравнения используем замену
=
k![]() (
2.27 )
(
2.27 )
и введем ( 2.27 ) в ( 2.26 ).
Тогда уравнение искусственной механической характеристики получится таким
ω
= k
ω
- Δω
![]() М
( 2.28 ).
М
( 2.28 ).
Поскольку k < 1, то скорость идеального холостого хода при работе на ползучнй характеристике меьше чем на естественной. Физически это объясняется тем, при работе на искусственной характеристике напряжение на обмотке якоря двигателя меьше напряжения сети из-за падения напряжения на последовательном резисторе r .
Поскольку ( r + r ) > ( r + k r ) > r , перепад скорости на ползучей характери-
стике больше, чем на естественной характеристике и меньше, чем при включении только одного последовательного резистора r . Физически это означает, что «ползучая» характе-
ристика более жестка, чем реостатная механическая характеристика при одном и том же значении сопротивления резистора r .
Таким образом, этот способ регулирования сочетает два способа:
1. регулирования изменением напряжения на якоре;
2. реостатного регулирования ( введением резистора последовательно с обмоткой якоря ).