

1.3. Приведение статических моментов к валу электродвигателя
В простых по устройству механизмах рабочий орган соединен с электродвигателем
непосредственно ( напрямую ).
Например, в электроприводе насоса его крыльчатка закреплена непосредственно на
валу электродвигателя. В этом случае статический момент , созданный крыльчаткой насо-
са, равен полезному моменту на валу электродвигателя. Иначе говоря, передача энергии от электродвигателя к насосу происходит без потерь энергии.
В более сложных по устройству механизмах, например, лебедках, брашпилях и т.п.
используют передачи ( редукторы ). В этом случае в передаче возникают потери энергии, в результате чего статический момент механизма и полезный момент двигателя неодинако
вы ( больше полезный момент двигателя ) .
Между тем, для того, чтобы подобрать электродвигатель под механизм, надо пред-
варительно рассчитать полезный момент двигателя по заранее заданным параметрам меха
низма и передачи. После этого легко рассчитать мощность электродвигателя и выбрать его из каталога.
Такой расчет полезного момента двигателя по заданным параметрам механизма и
передачи называют приведением статического момента ( механизма ) к валу электродвига-
теля.
Рассмотрим такой расчёт на примере упрощенного электропривода лебёдки, состоя
щего из электродвигателя М, одноступенчатого редуктора Р и грузового барабана Б ( рис. 9 ).
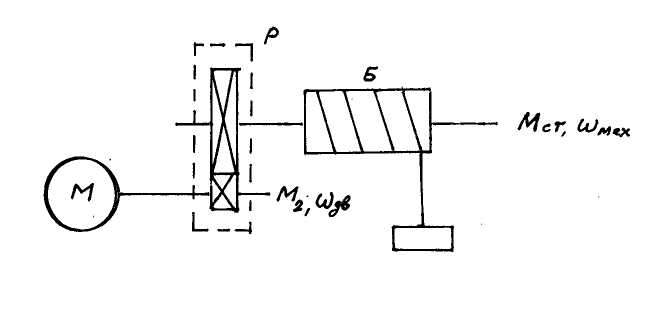
Рис. 9. Кинематическая схема электропривода лебёдки: М – электродвигатель,
Р – редуктор, Б – грузовой барабан
Пусть предварительно заданы параметры механизма и передачи, а именно: стати-
ческий момент механизма М , а также коэффициент полезного действия передачи η
и её передаточное число ί.
Далее рассуждаем так.
Мощность на валу электродвигателя
Р![]() = ω
* М
(
20 )
= ω
* М
(
20 )
Мощность на валу механизма
Р = ω * М ( 21 )
Мощности Р и Р связаны через коэффициент полезного действия передачи:
![]() η = Р
/ Р
( 22 )
η = Р
/ Р
( 22 )
Подставим в формулу ( 3 ) правые части формул ( 1 ) и ( 2 ):
η = ω * М / ω * М ( 23 )
Из формулы ( 4 ) найдем момент на валу электродвигателя
М = (ω * М ) / ( η* ω ) = М / ( η*ί ) ( 24 ),
где: ί = ω / ω - передаточное число передачи ( редуктора ).
Анализ формулы приведенного момента
Момент на валу электродвигателя тем больше, чем больше статический момент
М и чем меньше кпд η и передаточное число ί передачи.
Пример №9.
Рассчитать полезный момент на валу электродвигателя лебедки по таким исходным данным: М = 480 Нм, η = 0,8, ί = 12.
Решение
1. полезный момент на валу электродвигателя лебедки
М = М / ( η*ί ) = 480 / ( 0,8*12 ) = 50 Нм
1.4. Режимы работы электроприводов. Уравнения движения
В зависимости от изменения скорости электропривода, различают два режима его работы
1. установившийся или статический режим, при котором скорость не изменяется;
2. переходный или динамический режим, при котором скорость изменяется.
Переходный режим может возникнуть в таких случаях:
1. при изменении параметров двигателя, например, при регулировании скорости изменением сопротивления в цепи обмотки якоря;
2. при изменении параметров механизма, например, при изменении подачи насоса;
3. при изменении параметров судовой сети, например, при колебаниях напряжения.
В динамическом режиме, в дополнение к ранее рассмотренным электромагнитному
моменту двигателя М и статическому моменту механизма М , на валу двигателя возни-
кает
дополнительный, т.к. называемый
динамический момент М![]() .
.
Появление этого момента объясняется действием сил инерции всех без исключения движущихся частей электропривода. Например, в электроприводе лебедки динамический момент появляется вследствие инерции якоря электродвигателя, шестерней редуктора, грузового барабана и самого груза.
Выше было сказано, что существуют два режима работы электроприводов – устано
ившийся и переходный.
В установившемся режиме вращающий электромагнитный момент двигателя урав-
новешивается тормозным статическим моментом механизма. Этому режиму соответству-
ет уже известное уравнение моментов
М = М ( 26 ).
Это же уравнение можно записать так:
М - М = 0 ( 27 ).
В переходных режимах, например, при пуске, когда электропривод изменяет ско-
рость, в дополнение к электромагнитному моменту электродвигателя и статическому мо-
менту механизма возникает динамический момент М . Он создаётся совместным дей-
ствием всех без исключения вращающихся частей электропривода.
Этому режиму соответствует такое уравнение моментов:
М - М = М ( 28 ).
Уравнения ( 26 ) и ( 28 ) называют 1-м и 2-м видом уравнения движения электро-
привода. Эти уравнения относят к числу основных уравнений теории электропривода, по-
скольку они широко применяются в теории и практике электропривода.
Получим формулу динамического момента и выясним его влияние на работу элект-
ропривода.
Прежде чем приступить к изучению понятия «динамический момент», рассмотрим
тесно связанное с ним понятие «момент инерции».