

Лекция №10
Ферменно-балочное шасси (рис. 10.1) состоит из одной (одностоечное) или двух (двухстоечное) консольных балок, подкрепленных подкосами. Установка подкосов разгружает стойку от изгибающих моментов, боковой подкос — от момента, создаваемого боковой силой, а передний или задний,— от действия момента силы, направленной вдоль оси самолета Ферменно-балочные шасси получили наибольшее распространение.
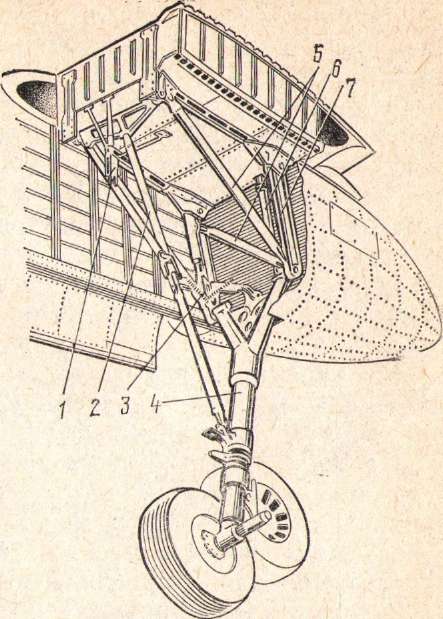
Рис. 10. 1 Ферменно-балочное шасси:
1 — замок убранного положения; 2 — распор-замок выпущенного положения; 3 — складывающийся подкос; 4 — амортизационная стойка; 5 — подкосы силовой фермы; 6 — гидроцилиндр уборки-выпуска шасси; 7—стойка силовой фермы
Для самолетов с большой полетной массой серьезной становится проблема уменьшения удельной нагрузки на грунт, так как проходимость самолета по грунту обратно пропорциональна ей. С увеличением числа колес шасси опорная поверхность увеличивается. Применение многоколесного шасси способствует также повышению энергоемкости тормозов и уменьшает опасность аварии при проколе одного из пневматиков. Поэтому широкое применение получили шасси со спаренным креплением колес на тележке. Наибольшее распространение получили многоколесные тележки с числом колес от четырех до восьми. И так, на самолете Ил-86 шасси с тремя основными стойками и одной передней имеет 14 колес. Встречаются самолеты, у которых для увеличения проходимости шасси имеют несколько колес, расположенных вдоль фюзеляжа в один или два ряда.
ЛЕКЦИЯ № 11
Конструкция и работа систем управления самолетом
Системы управления самолетом разделяют на основные и вспомогательные К основным принято относить системы управления рулем высоты, рулем направления и элеронами (рулями крена). Вспомогательное управление — управление двигателями, триммерами рулей, средствами механизации крыла, шасси, тормозами и т. д.
Любая из основных систем управления состоит из рычагов управления и проводки, связывающей эти рычаги с рулями. Рычаги управления отклоняются ногами и руками пилотов. С помощью штурвальной колонки или ручки управления, перемещаемой усилием руки, пилот управляет рулем высоты и элеронами. Рулем направления управляют с помощью ножных педалей. Конструкция управления предусматривает, чтобы отклонение командных рычагов, а следовательно, и изменение положения самолета в пространстве соответствовали естественным рефлексам человека. Например, движение вперед правой ноги,
действующей на педаль, вызывает отклонение руля направления и самолета вправо, перемещение штурвальной колонки вперед от себя вызывает снижение самолета и увеличение скорости полета и т. д.
Для облегчения пилотирования и повышения безопасности полета при продолжительном полете управление большинства гражданских самолетов
дублируется: делают две пары педалей, две штурвальные колонки или ручки, которые связаны между собой так, что отклонение рычага первого пилота вызывает такое же отклонение рычагов у второго пилота. Нормы летней годности гражданских самолетов СССР регламентируют максимальные усилия Р-на рычагах управления. Они не должны превышать по абсолютному значению 350 Н, при управлении самолетом по тангажу, 200 Н при управлении по крену, 700 Н при управлении по курсу. Уменьшить усилия и даже полностью снять нагрузку с рычагов управления можно с помощью аэродинамической компенсации. Для преодоления больших, превышающих физические возможности пилотов, усилий на рычагах управления к системе управления подключают гидравлические или электрические приводы, которые называются усилителями (бустерами) . В этом случае пилот управляет усилителями, которые, в свою очередь, отклоняют рули. Система управления самолетов, предназначенных для длительных полетов, снабжается автопилотом, который облегчает пилотирование. Автопилоты с гироскопическими датчиками углового положения самолета, стабилизируя угол тангажа, обеспечивают движение с постоянной высотой и скоростью, стабилизируя угол крена и рыскания,— движение в заданном направлении. Вопрос о необходимости включения автопилота решает пилот.
Самый важный этап полета — посадка, особенно в условиях плохой видимости или отсутствии видимости земли (туман). Здесь управление по обычным пилотажным приборам невозможно. Ранее посадка в таких условиях запрещалась, и ее производили на ближайшем запасном аэродроме (как правило, в другом городе за сотни километров). В настоящее время созданы устройства, позволяющие совершать автоматическую посадку, без участия пилота и видимости земли. Автоматическое управление посадкой сводится к стабилизации траектории снижения, заданной в вертикальной и горизонтальной плоскостях. Датчиками информации о режиме полета, скорости, высоте и местоположении самолета являются, трубка Пито, радиовысотомер, радиомаяки и инерциальная система.
Инерциальная система — это автономное навигационное устройство, построенное по принципу интегрирования ускорений, замеряемых в некоторой стабилизируемой системе координат. Для решения навигационных задач на борту самолета устанавливают бортовую цифровую вычислительную машину (БЦВМ), позволяющую автоматически управлять траекторией полета по заданной программе. Автоматизация систем управления (АСУ) приводит к постепенному отказу от механической проводки управления и переходу к электродистанционным проводным системам. Информация, поступающая в АСУ самолетом, формируется в виде электрических сигналов, которые реализуются приводами управления. При этом система управления значительно упрощается, получается более удобной гибкой при монтаже на самолете. Устраняется вредное влияние на процесс управления трения, люфта в проводке, упругих деформаций конструкции и т. п. Информация, предназначенная для экипажа самолета, поступает на индикаторы приборной доски.
Управление стабилизатором осуществляется чаще всего гидромоторами через винтовую пару. При этом предусмотрены меры, полностью исключающие возможность самопроизвольного увода стабилизатора. При выключенной системе управления стабилизатор надежно фиксируется в любом положении самотормозящейся резьбой винтовой пары. Стабилизатором управляют из кабины экипажа, а его положение контролируют по индикатору на приборной доске.
ЛЕКЦИЯ № 12
ЭЛЕМЕНТЫ СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТОМ
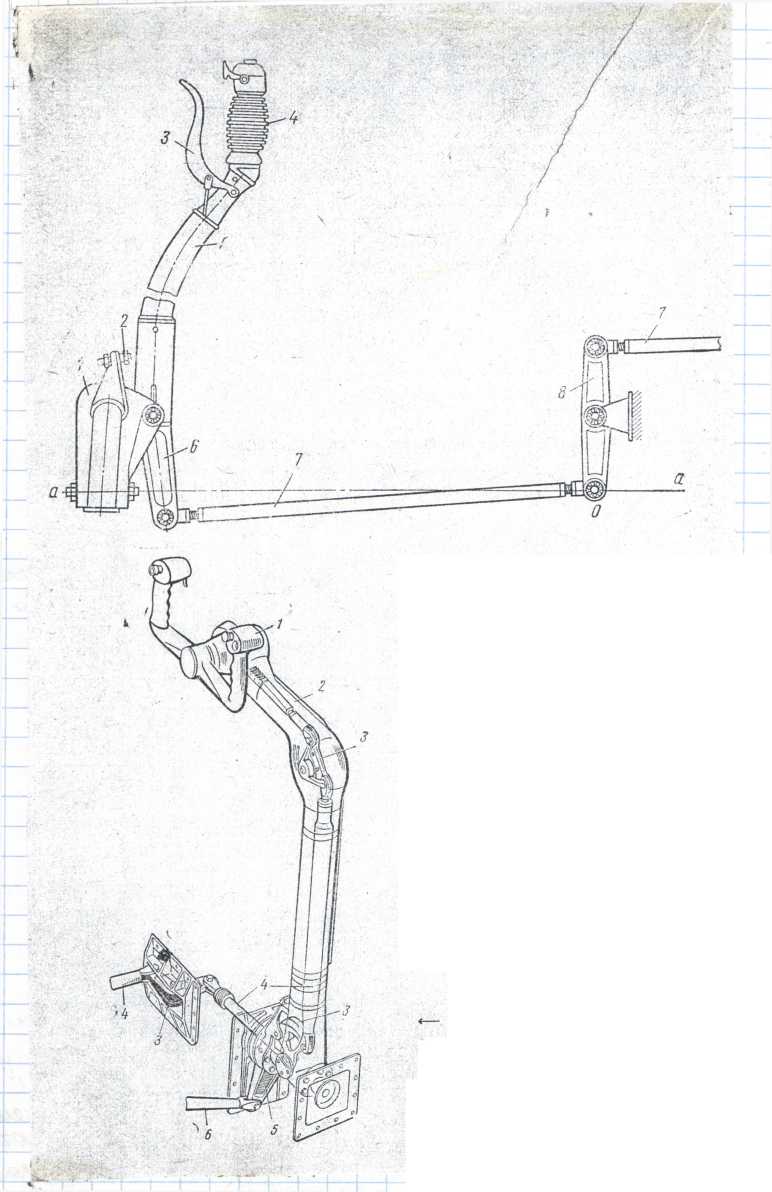
Рис. 12.1. Схема привода ручного управления:
1 — кронштейн; 2 — регулировочный болт ограничения отклонения ручки; 3 — рычаг управления клапаном торможения колес; 4 — ручка управления; 5 — труба ручки управления; 6 — рычаг крепления тяги управления рулем высоты; 7 —тяга; 8 — качалка
Рис. 12.2. Штурвальная колонка управления:
1 — штурвал; 2 — труба; 3 — качалка управления элеронами;
4—тяги управления элеронами;
5— рычаг; 6 — тяга управления
рулем высоты
Рулем высоты и элеронами управляют при помощи ручки управления или штурвальной колонки. Ручка (рис. 10.1) представляет собой вертикальный неравноплечий рычаг с двумя степенями свободы, т. е. поворачивающийся вокруг двух взаимно перпендикулярных осей. При движении ручки вперед и назад отклоняется руль высоты, при перемещении ручки влево и вправо (поворот вокруг оси а — а) отклоняются элероны. Независимость действия руля высоты и элеронов достигается размещением шарнира О на оси а — а.
На тяжелых самолетах вследствие большой площади рулей высоты и элеронов увеличиваются нагрузки, потребные для отклонения рулей. В этом случае самолетом удобнее управлять с помощью штурвальной колонки (рис. 10.2). Подобных колонок на самолете две: одной управляет командир корабля, другой — второй пилот. Каждая колонка состоит из дюралюминиевой трубы, головки штурвала и нижнего узла — опоры штурвальной колонки, в торцах которого заделаны шарикоподшипники.
В нижней части колонки имеется рычаг, к которому присоединены тяги управления рулем высоты. Тяги управления элеронами соединены с качалками, установленными на кронштейнах. На каждом штурвале установлены кнопки управления связной радиостанцией, включения и отключения автопилота, самолетного переговорного устройства и нажимной переключатель управления триммером руля высоты.
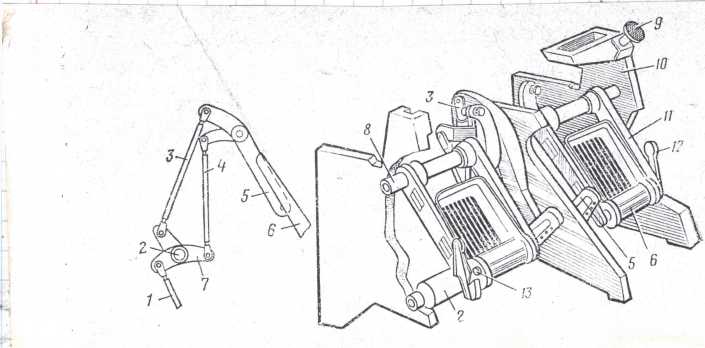
Рис. 12.3. Пульт ножного управления
Для управления рулем направления предназначены педали двух типов: перемещающиеся в горизонтальной плоскости и перемещающиеся в вертикальной плоскости. Педали в горизонтальной плоскости перемещаются по прямолинейным направляющим или на шарнирном параллелограмме, собранном из стальных тонкостенных труб. Параллелограмм обеспечивает прямолинейное перемещание педалей без их поворота, что необходимо для удобного и неутомительного положения ступни ноги пилота. Педали, перемещающиеся в вертикальной плоскости, имеют верхнюю или нижнюю подвеску. Положение педалей можно регулировать, подгоняя под рост пилота.
Пульт ножного управления (рис. 10.3) состоит из трех щек Щ между которыми на штангах 11, соединенных с трубой 8, подвешены педали 6. Каждая педаль пальцем 13, проходящим внутри оси педали, связана с секторной качалкой 5. Верхняя часть секторных качалок тягами 4 и 3 соединена с рычагами горизонтальной трубы 2. На трубе 2 закреплен рычаг 7, к которому присоединена тяга 1, идущая к рулю поворота. При нажатии, например, на левую педаль (от пилота), повернется секторная качалка 5, которая через тягу 3 вызовет поворот трубы 2 против часовой стрелки. Это движение в свою очередь через тягу 4 вызовет поворот секторной качалки правой педали в противоположную сторону. Пальцы служат для регулировки педалей по росту пилота. Регулирование выполняют следующим образом: пилот отжимает вбок рычаг защелки 12 и тем самым выводит палец 13 из зацепления с сектором 5. Пружина (на рисунке не показана) поворачивает педаль в сторону пилота.
Проводка управления (рис. 9.4) может быть гибкой, жесткой либо смешанной.
Гибкая проводка управления выполняется из тонких стальных тросов, диаметр которых выбирается в зависимости от действующей нагрузки и не превышает 8 мм. Так как тросы могут работать только на растяжение, то управление рулями в таком случае выполняется по двухпроводной схеме. Отдельные участки тросов соединяются тандерами. Трос к тандерам и секторам крепится коушами (рис. 9.5). Для уменьшения провисания тросов на прямолинейных участках используют текстолитовые направляющие, в местах перегиба троса устанавливают ролики с шариковыми подшипниками.

Жесткая проводка представляет собой систему жестких тяг и качалок. Качалки служат промежуточными опорами, которые необходимы для деления тяг на сравнительно короткие участки. Чем короче тяга, тем меньше вероятность вибраций. Но чем больше разъемов у тяг, тем больше масса проводки.
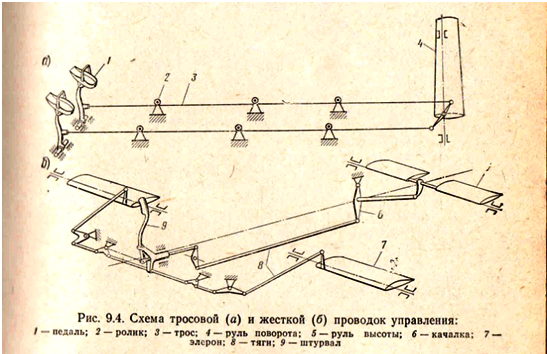
Рис. 9.4. Схема тросовой (а) и жесткой (б) проводок управления
1— педаль; 2 — ролик; 3 — трос; 4 — руль поворота; 5 — руль высоты; 6 — качалка; 7-элерон; 8 — тяги; 9 — штурвал
Для повышения надёжности управления каждая из тяг выполняется из двух труб и вставленных одна в другую. Основная труба — наружная, внутренняя дублер основной. Каждая труба в отдельности может полностью воспринять расчетную нагрузку, приходящуюся на эту тягу. Достоинства жесткой проводки следующие: отсутствие вытяжки проводки при эксплуатации, что исключает возможность образования люфтов; малые силы трения; высокая живучесть. Недостатки жесткой проводки по сравнению с гибкой - большая масса и потребность в значительных объемах для ее размещения. Гибкую проводку не следует применять при передаче больших усилий, а также в тех случаях, когда от управления требуется большая точность исполнения
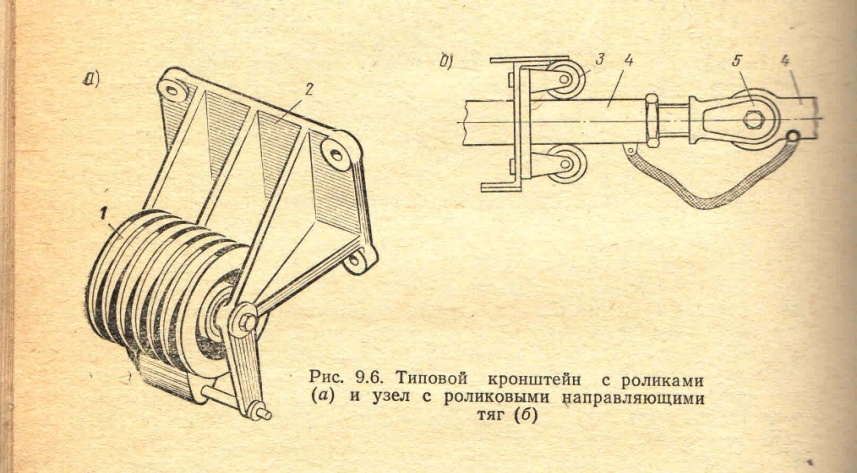
Для поддержания тросов управления и изменения их направления применяют ролики 1, которые прессуют из текстолита-крошки и для уменьшения трения
монтируют на шарикоподшипниках.
Кронштейны 2 крепления роликов обычно литые и изготавливаются из
магниевых сплавов.

прямая
угловая
Тяги жесткой проводки 2 монтируют на качалках 1 и роликовых направляющих 3.
Качалки служат для изменения направления движения рис. 9.7 (а),а также изменения
усилия в тягах рис. 9.7 (б). Все качалки имеют шарикоподшипники, обычно допускающие незначительный перекос колец. Подобные подшипники исключают
возможность заеданий от перекосов при неточностях монтажа или при деформациях
( повреждениях ) самолёта.
На участках, где тяги совершают прямолинейное движение, устанавливают роликовые направляющие. Больше двух роликовых направляющих на одной тяге ставить нельзя, так как при деформациях самолета это приводит к заеданию проводки. Направляющие имеют фланцы-крепления к фюзеляжу. В ушки направляющих, расположенных под углом 120° друг относительно друга, вмонтированы три шарикоподшипника, на наружные кольца которых напрессованы бандажные втулки. Между этими подшипниками и перемещается тяга. Управление механизацией крыла осуществляется или приводом с механической трансмиссией, или силовыми цилиндрами гидросистемы самолета. При механической трансмиссии поверхности управления перемещаются винтовыми механизмами, вращение которых от привода передается через угловые редукторы вращающимися валами. Каждая секция закрылка, интерцептора и другой отклоняющейся поверхности перемещается двумя винтовыми механизмами и силовыми цилиндрами. Приводом пилот управляет дистанционно с помощью механической (тросовой) или электрической проводки.
Для защиты трансмиссии от перегрузки в нее включают ограничители крутящих моментов и эластичные муфты. По концам трансмиссии устанавливают датчики асимметрии поверхности управления. Асимметричное перемещение, например, в случае обрыва вала трансмиссии, может привести к крену самолета, который с помощью элеронов не всегда можно парировать. Система защиты от асимметрии сравнивает положение левых и правых поверхностей управления и при наличии разности отклонения выше допустимой прерывают цепь управления приводами. Валы трансмиссии пустотелые, имеют промежуточные опоры, гермовыводы в местах выхода из фюзеляжа в крыле, карданные соединения для компенсации неточностей сборки и отклонения осей. В систему управления механизацией входит также система сигнализации и контроля положения.
ЛЕКЦИЯ № 13
Конструкция и работа силовой установки
Важнейшим элементом ЛА является двигатель, данные которого в значительной степени определяют возможность достижения больших скоростей, дальностей и высот полёта. В связи с расширением диапазона скоростей, дальностей и высот полёта, повышением надежности двигателей и безопасности полёта самолетов и вертолетов существенно усложняются конструктивные схемы авиационных двигателей, улучшаются их параметры
рабочего процесса, повышается уровень автоматизации авиадвигателей и топливной автоматики в целом.