

§ 2. Распределение питания
От агрегатов питания напряжение 200 В 400 Гц через распределительные щиты (блок 170) подается на автоматические выключатели В6, В9, В10 и В13. С фидера 1 при нажатии кнопки ПИТАНИЕ ВКЛЮЧЕНО на блоке 167 через автоматический выключатель В6 переменное напряжение через контакты контакторов Р2, РЗ, Р4, Р5 подается на вентиляторы передатчика и стоек прицепа АП-1 (рис, 13.1). Через контакты контактора Р18 переменное напряжение подается на макальные трансформаторы передатчика и на аппаратуру АДУ. По истечении 3 мин подается полное напряжение накала на генераторную лампу блока 20 и на лампы высоковольтного выпрямителя.
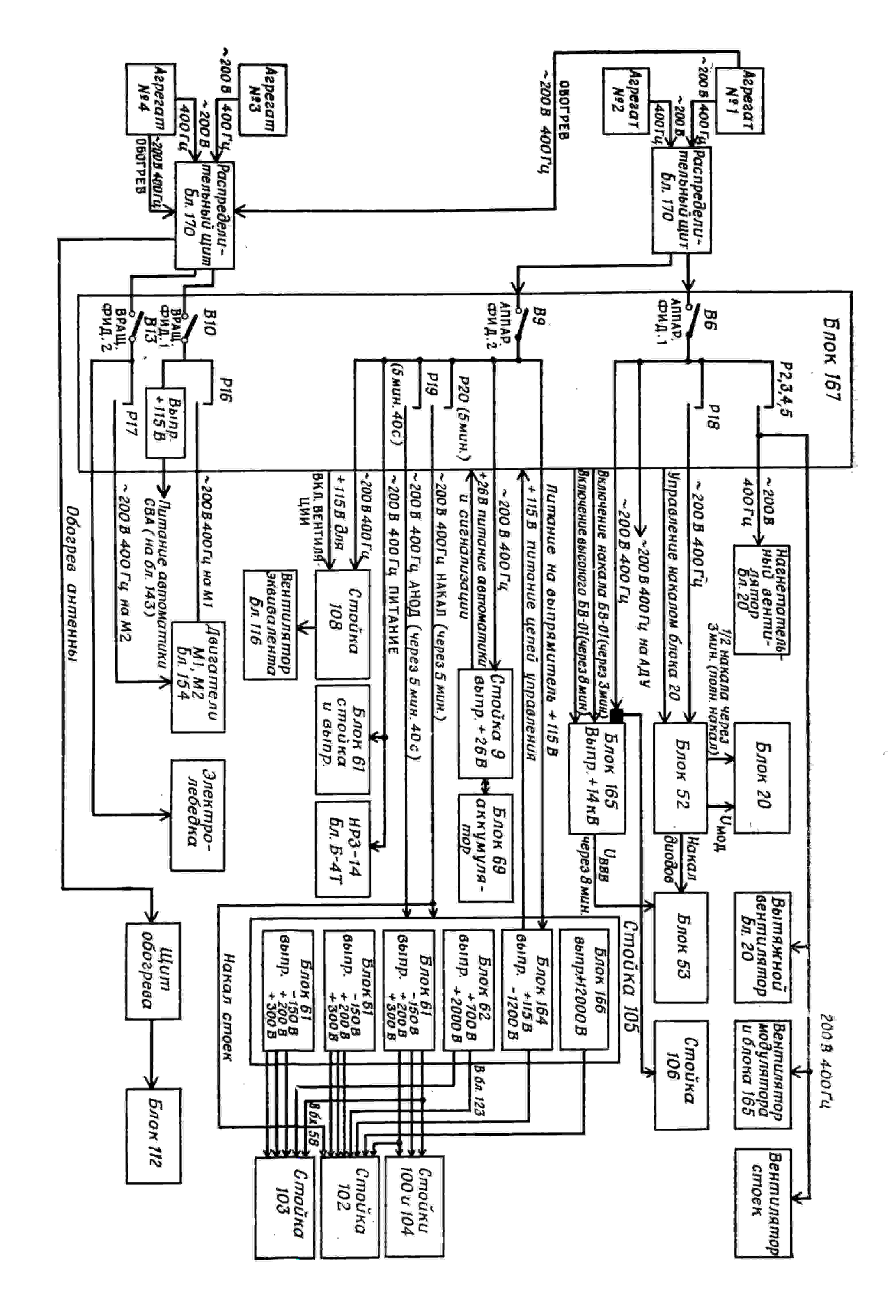
Рис. 13.1. Схема распределения электропитания.
По фидеру 2 через контакты автоматического выключателя В9 напряжение 200 В 400 Гц поступает на выпрямитель +115 В блока 164 и на выпрямитель +26 В. Напряжения постоянного тока +115 В и + 26 В поступают на блок 167 для питания цепей управления автоматики и сигнализации. Одновременно переменное напряжение по фидеру 2 через автоматический выключатель поступает на контакты контакторов Р19 и Р20, на стойку 108, на выпрямитель стойки 104 имитатора целей и помех и на блок Б-4Т запросчика.
Через 5 мин сработает контактор Р20 и напряжение 200 В 400 Гц будет подано на накальные трансформаторы стоек прицепа АП-1, а через 5 мин 40 с через контакты контактора Р19 подается напряжение на анодные трансформаторы стойки 105. Со стойки 105 напряжения постоянного тока поступают на стоики 100, 101, 102, 103 и включается приемно-индикаторная аппаратура и аппаратура защиты от помех. Аппаратура запросчика и имитатор целей и помех включаются автономно с блока Б-4Т и пульта включения питания имитатора.
При установке выключателя УСТ. АЗИМ. — ВРАЩЕНИЕ на блоке 143 в положение ВРАЩЕНИЕ через 5 мин напряжение 200 В 400 Гц от агрегата № 3 или 4 по фидеру через автоматические выключатели В10 и В13 и контакты контакторов Р16 и Р17 подается на двигатели переменного тока Ml и М2 электропривода вращения (блок 154) и антенна начинает вращаться со скоростью 2 об/мин.
Через 8 мин включится анодный контактор и переменное напряжение поступит на анодный трансформатор блока 165, в результате с высоковольтного выпрямителя на модулятор будет подаваться напряжение постоянного тока +14000 В. Таким образом, РЛС полностью включится через 8-9 мин после нажатия кнопки включения питания на блоке 167.
В РЛС последних выпусков приемно-индикаторная аппаратура включается через 3 мин, а передатчик через 4 мин.
При обледенении антенной системы от одного из резервных агрегатов напряжение 200 В 400 Гц через распределительный щит может подаваться на обогрев антенны.
Глава 14 боевая работа
§ 1. Состав и обязанности боевого расчета
Боевая работа на РЛС в каждую смену осуществляется полным или сокращенным боевым расчетом.
В состав полного боевого расчета входят:
начальник станции;
начальник смены;
первый (старший) оператор (рабочее место за основным индикатором кругового обзора);
второй оператор (рабочее место за первым выносным индикатором кругового обзора);
третий оператор (рабочее место за вторым ВИКО);
электромеханик агрегата АД-30 (рабочее место в силовом прицепе) ;
электромеханик агрегатов АД-5 (рабочее место определяется в зависимости от места установки выносных ИКО).
В состав сокращенного боевого расчета входят:
при автономной работе РЛС — два оператора и один электромеханик агрегатов АД-30 (рабочее место первого оператора за основным ИКО, а второго — за выносным ИКО);
при сопряжении РЛС с автоматизированной системой управления — один оператор и один электромеханик агрегатов АД-30.
Первый оператор подчиняется начальнику станции и отвечает за своевременное обнаружение и опознавание воздушных целей, а также за непрерывность передачи их координат и принадлежности на КП, его рабочее место — за основным ИКО.
Он обязан:
включать и настраивать индикатор;
при заступлении на дежурство принять аппаратуру прицепов АП-1 и АП-2, проверив ее работу под током;
проверить работу средств связи на своем рабочем месте, ознакомиться с воздушной обстановкой и доложить начальнику станции (смены) о приеме аппаратуры и заступлении на дежурство;
непрерывно следить за воздушной обстановкой по экрану индикаторов, определять координаты, принадлежность и другие характеристики целей и передавать данные о целях на КП с установленной дискретностью;
определять количество самолетов в групповой цели и докладывать начальнику станции о маневре целей;
управлять системой вращения и сканирования антенны в зависимости от воздушной обстановки;
своевременно докладывать начальнику станции о выходе целей из зоны обнаружения станции;
докладывать начальнику станции о применении противником помех и правильно использовать аппаратуру защиты от помех;
при сдаче дежурства ознакомить заступающего оператора с воздушной обстановкой.
Второй и третий операторы работают за выносными ИКО, отвечают за своевременное обнаружение и опознавание воздушных целей, а также за непрерывную передачу их координат и принадлежности на КП.
Они обязаны:
включать и настраивать выносные ИКО;
вести обнаружение воздушных целей, производить опознавание и докладывать о них дежурному по КП;
по указанию дежурного по КП производить передачу плоскостных координат и принадлежности обнаруженных целей.
При сопряжении станции с системой «Воздух-1» съем и передача информации производятся с индикаторов АСУ.
Электромеханик отвечает за исправное состояние и бесперебойную работу агрегата питания.
Он обязан:
по команде с КП роты включать двигатели и подавать напряжение на радиолокационную станцию;
во время боевой работы контролировать напряжение и режим работы агрегатов;
периодически проверять количество топлива в баках, уровень масла и воды в радиаторах;
в случае неисправности агрегата немедленно докладывать начальнику станции и принимать меры к переходу на работу станции от резервных агрегатов.