

§ 4. Контроль функционирования аппаратуры с-119
Для включения стойки 12 аппаратуры С-119 необходимо:
на стойке 12 выключатель ВЕНТИЛЯТОР установить в положение ВКЛ.;
выключатель ПИТАНИЕ на пульте включения установить в положение ПИТАНИЕ;
проверить величину питающего напряжения и переключателем МЕНЬШЕ — БОЛЬШЕ установить 220±5 В на блоке 205.
На блоке 202:
переключатель СЛЕЖЕН. — ВЫКЛ. — ИМИТАТ. установить в положение СЛЕЖЕН.;
выключатель ПСП установить в положение ПСП, при этом загорается лампочка НАКАЛ;
спустя 1—1,5 мин после включения накала выключатель АНОД установить в положение АНОД, при этом загорается лампочка АНОД.
Проверка прохождения сигналов с П-14Ф на индикатор ИА-02 производится в комплексе с высотомером ПРВ-11.
§ 5. Аппаратура дистанционного управления (аду)
При применении противником оружия массового поражения боевая работа радиотехнических подразделений будет проходить в условиях длительного радиоактивного, химического и бактериологического (биологического) заражения. Радиотехнические подразделения будут подвергаться как непосредственному огневому воздействию, так и косвенному поражению, когда противник наносит удар по близко расположенным от них объектам.
Выход из строя личного состава, боевой техники и нарушение управления подразделениями может привести к потере боеспособности. Одним из основных мероприятий, направленных на повышение живучести радиотехнических подразделений и позволяющих осуществлять непрерывно боевую работу в течение спада уровней радиации до безопасных значений, является применение на РЛС аппаратуры дистанционного управления. При наличии АДУ расчет РЛС может вести боевую работу, находясь в защищенном КП на удалении до 1000 м от аппаратных прицепов АП-1 и АП-2.
В состав АДУ входят:
пульт дистанционного управления (блок 187), размещенный в аппаратном прицепе АП-3 (рис. 10.5);
блок коммутации (блок 186), размещенный в стойке 103 аппаратного прицепа АП-1 (рис. 10.6).
С пульта дистанционного управления (ПДУ) производятся следующие операции (рис. 10.7):
включение и выключение питания РЛС при поданном первичном напряжении на блок 167;
переключение мощности передающего устройства 50—100%;
сброс перегрузки по цепям АНОД +14 кВ генераторной лампы и модулятора, по цепям накала модуляторных ламп и питания системы вентиляции и СВСА, а также повторное включение станции;
включение, выключение и переключение скорости вращения антенны;
установка антенны на заданный азимут;
переключение зон обнаружения (ВЕРХ. или НИЖН.);
включение автоматического переключения зон обнаружения через один оборот антенны;

Рис. 10.5. Передняя панель пульта дистанционного управления .

Рис. 10.6. Передняя панель блока коммутации.
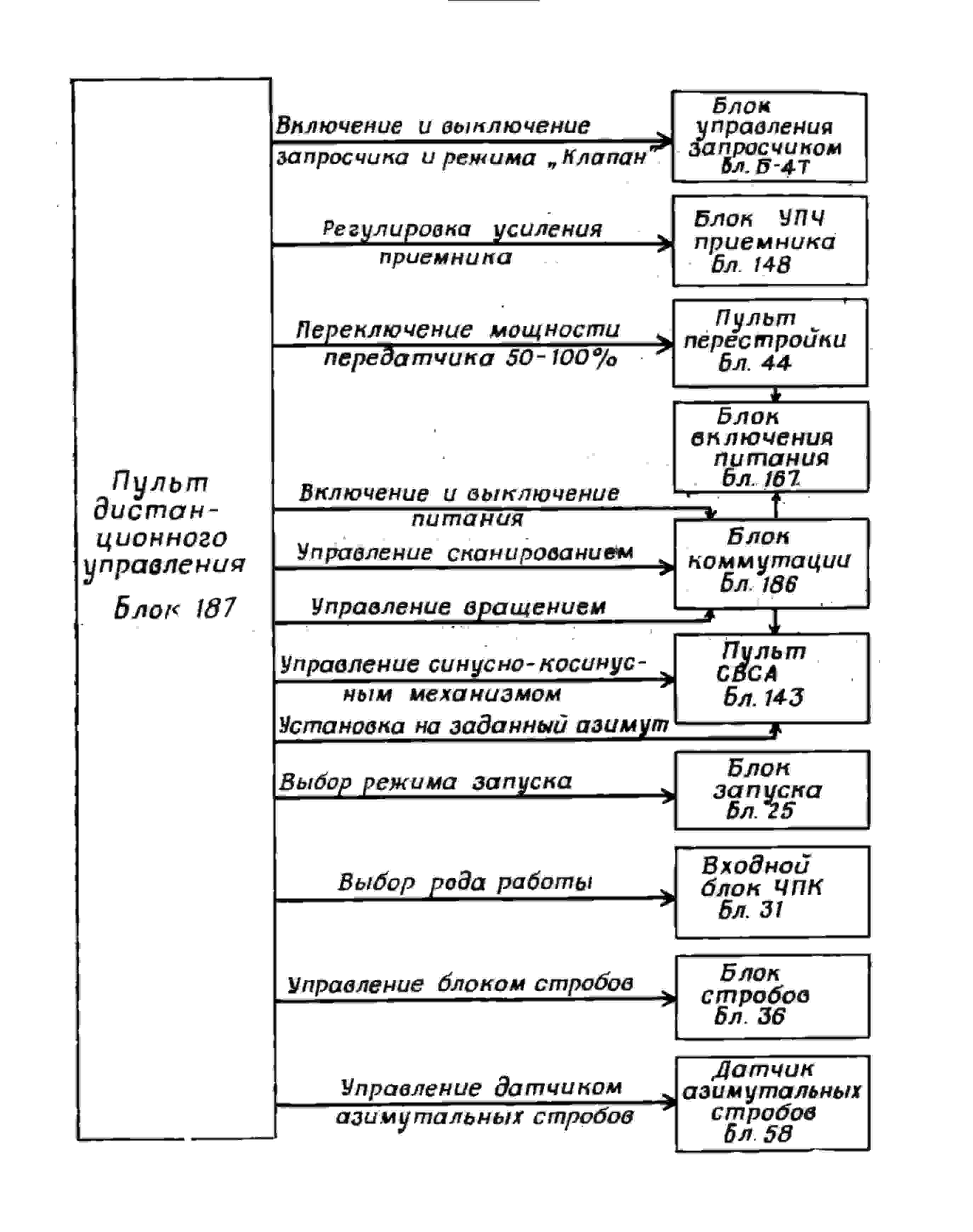
Рис. 10.7. Структурная схема АДУ.
выбор азимута автоматического переключения зон обнаружения;
выбор рода работы аппаратуры защиты от помех;
установка зон когерентного и амплитудного каналов (управление работой блоков 36 и 58);
компенсация скорости перемещения пассивной помехи под действием ветра;
выбор режима запуска (симметричный или несимметричный);
включение и выключение питания и синхронно-следящего привода запросчика;
управление режимами работы запросчика («с клапаном» или «без клапана»);
регулировка усиления приемника.
Команды с пульта дистанционного управления поступают на исполнительные элементы управляемых блоков (блоки 25, 31, 36, 38, 58, 143, 44, 148, 167 и аппаратуру запросчика) непосредственно или после декодирования в блоке 186. Сигналы об исполнении команд или включении соответствующего режима поступают непосредственно с управляемых блоков на пульт дистанционного управления либо после кодирования в блоке 186.
Кодирование команд и сигналов управления обеспечивает уплотнение каналов связи между пультом дистанционного управления и управляемой аппаратурой РЛС. Кодирование команд или сигналов управления осуществляется путем передачи двух команд, (сигналов) по одной линии связи в виде постоянных напряжении разной полярности.