

Ручное вращение
При установке выключателя В1 в положение РУЧНОЕ со схемы коммутации отключается напряжение +26 В. Через замкнувшиеся контакты 1—3 выключателя В1 +26 В подается на электромагнитные муфты ЭМ5 и ЭМ4, которые включают кинематическую цепь вращения от двигателей переменного тока. Валы двигателей переменного тока приводятся в движение рукояткой и через включенные электромагнитные муфты ЭМ5 и ЭМ4 производится вращение антенны.
§ 3. Управление сканированием антенны
Устройство управления сканированием предназначено для коммутации излучателей облучателя антенны при формировании штатной и высотной зон обнаружения.
Коммутация осуществляется с помощью схемы, формирующей команды управления электромагнитными приводами облучателя антенны (рис. 9.4).
В состав схемы входят:
сельсин-трансформатор в блоке 143 или в блоке 187 при дистанционном управлении;
фазочувствительный выпрямитель;
несимметричный триггер;
релейная схема управления.
При установке переключателя ЗОНА на пульте управления СВСА в положение НИЖН. напряжение +26 В на релейную схему не подается. Схема будет находиться в таком состоянии, что на электромагнитные приводы будет подаваться команда на формирование штатной зоны обнаружения и энергия от передатчика будет распределяться между двумя излучателями.
При установке переключателя ЗОНА на блоке 143 в положение ВЕРХ на релейную схему будет подаваться напряжение +26 В и схема перейдет в другое состояние. В этом случае на электромагнитные приводы будет подаваться команда на формирование высотной зоны обнаружения и энергия от передатчика будет распределяться между тремя излучателями.
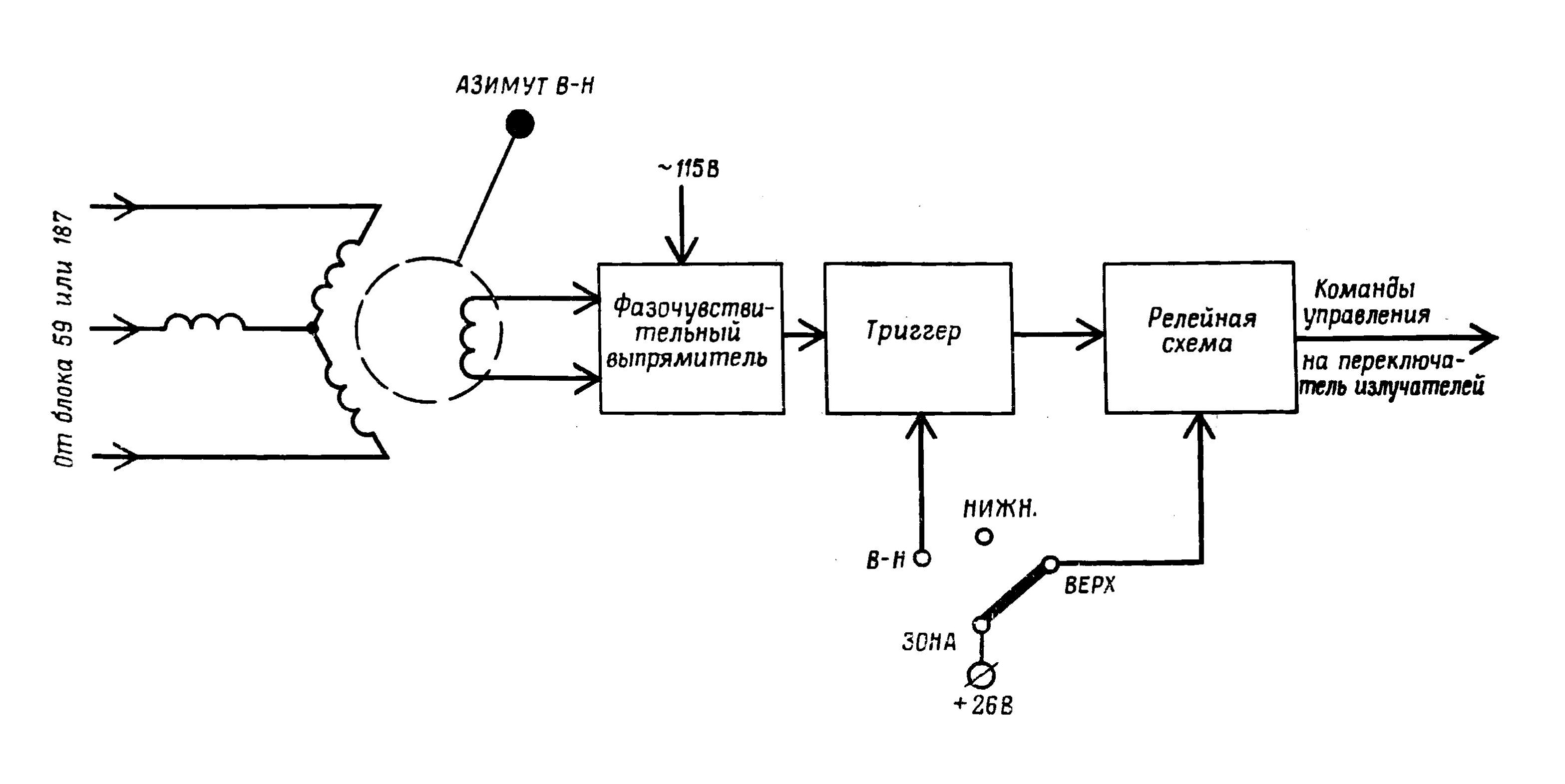
Рис. 9.4. Функциональная схема устройства сканирования.
При установке переключателя ЗОНА в положение В — Н (режим сканирования) осуществляется автоматическое переключение режимов штатной и высотной зон обнаружения через один оборот антенны. В этом режиме на триггер через контакты переключателя подается напряжение постоянного тока +26 В. Триггер под действием управляющего) напряжения вырабатывает разнополярные импульсы, чередующиеся через один оборот антенны.
Управляющее напряжение поступает с сельсина-трансформатора блока 143 при местном управлении или с сельсина-трансформатора блока 187 при дистанционном управлении. В фазочувствительном выпрямителе переменное напряжение с сельсина-трансформатора во взаимодействии с опорным напряжением выпрямляется и в виде огибающей подается на триггер. Переход огибающей управляющего напряжения из положительного значения в отрицательное задается ручкой АЗИМУТ В — Н на блоке 143 (или 187), тем самым задается момент перехода триггера из одного состояния в другое через один оборот антенны.
§ 4. Контроль функционирования
Проверка автоматического включения вращения и переключения
скоростей
При включении РЛС убедиться, что вращение антенны со скоростью 2 об/мин начинается через 5 мин после нажатия кнопки ПИТАНИЕ ВКЛЮЧЕНО на блоке 167.
Последовательным нажатием кнопок на блоке 143 включить вращение антенны со скоростью 4 об/мин, а затем 6 об/мин и убедиться, что переход с одной скорости на другую и вращение антенны происходят плавно.