

13)Предмет кинематики. Система отсчета. Задачи кинематики.
Кинематика-раздел теоретической механики, в котором мех. движения изучаются без учёта сил, действующих на тела.
Система отсчёта -система, состоящая из точки отсчёта, системы координат и механизма отсчёта времени. Задачи кинематики:
1)определить положение тела в любой момент времени; 2)определить кинемат.характеристики(а и v) в любой момент времени.
Задачи реш-ся с использованием законов движения(некоторая ф-ция от времени, кот. позволяет определить положение v и а данного объекта).
14) Векторный, координатный и естественный способы описания движения.
1)векторный способ: положение движения точки опред-ет её радиус-вектор(проводится из точки отсчёта в данную). Закон движ. т.:зависимость от времени.
2)координатный способ: через т.о. проводят декартов.ось координат. Положение точки опред-ся её координ-ми. Закон движения точки: зависимость её координат от времени(x,y,z- координаты движ. т.).
3)естественный способ: положение точки опред-ся дуговой координатой. Точку.отс. выбирают на траектории. Дуговая координата- отсчитывается от выбр. точки отсч. по траектории. Она совпадает с пройденным путём, если точка движ-ся в одном направлении. Закон движения т.: зависимость дуговой координаты от времени. Вводят 3 естеств. Оси:1)касательная(направлена по касательной к траектории по направлению движения); 2)нормаль(направлена перпендик-но к касательной и к центру кривизны траектории); 3)би-нормаль(направлена одновременно перпендикулярно касат. и нормали. Всегда направлена перпен-но плоскости, в кот. движ-ся точка).
15) Скорость точки при различных способах описания движения.
1)v при векторном способе: вектор v= производной по t от S.
2)
v при координатном способе:

3) v при естественном способе: модуль v= производной по времени от дуговой координаты. Вектор скорости точки направлен по касательной к траектории.
16) Ускорение точки при координатном способе описания движения.
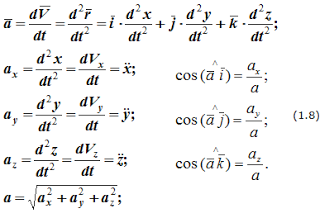
при координатном способе описания первоначально
определяют проекции ускорения на декартовы оси. Проекция ускорения на ось равна производной по времени от проекции скорости на ту же ось.
17) Равнопеременное движение точки.
Равнопеременное движение точки - движение, при к-ром касат. ускорение w т точки (в случае прямолинейного движения полное ускорение w )постоянно. Закон Р. д. точки и закон изменения её скорости u при этом движении даются равенствами:
![]()
где
s - измеренное вдоль дуги траектории
расстояние точки от выбранного на
траектории начала отсчёта, t-
время, s0 -
значение s в нач. момент времени t = 0. ![]() -
нач. скорость точки. Когда
знаки u и w одинаковы,
Р. д. является ускоренным, а когда разные
- замедленным.
-
нач. скорость точки. Когда
знаки u и w одинаковы,
Р. д. является ускоренным, а когда разные
- замедленным.
При поступат. Р. д. твёрдого тела всё сказанное относится к каждой точке тела; при равномерном вращении вокруг неподвижной оси угл. ускорение e тела постоянно, а закон вращения и закон изменения угл. скорости w тела даются равенствами
![]()
где f - угол поворота тела, f0 - значение f в нач. момент времени t = 0, w0 - нач. угл. скорость тела. Когда знаки w и e совпадают, вращение является ускоренным, а когда не совпадают - замедленным.