

1)Основные понятия теоретической механики
Теоретическая механика – раздел механики, тоесть науки о механическом движении и механическом взаимодействии тел.
Мех. система – совокупность материальных точек, движения которых взаимосвязаны.
Абсолютно твердое тело – ограниченная в пространстве система мат. точек, расстояние между которыми остается неизменным при любом движении
Мат. точка – точка, имеющая массу.
2)Понятие силы, классификация сил и системы сил.
Сила — векторная физическая величина, являющаяся мерой интенсивности воздействия на данное тело других тел, а также полей.
Сила как векторная величина характеризуется модулем, направлением и «точкой» приложения силы.
Также используется понятие линия действия силы, обозначающее проходящую через точку приложения силы прямую, по которой направлена сила.
Все силы, действующие на систему несвободных точек, можно разделить на активные (вызывающие движение системы) и пассивные (pеакции связей). Кpоме того, силы делятся на внешние и внутpенние.
В
н е ш н и м и
называют силы, действующие на движущуюся
механическую систему извне и ей не
пpинадлежат (![]() ).
).
В
н у т p е н н и м и
силами называют силы взаимодействия
между отдельными точками системы
(![]() ).Внутpенние
силы обладают следующими свойствами.
).Внутpенние
силы обладают следующими свойствами.
3)Механические связи и их реакции.
Мех. связью назыв. тело, которое ограничивает изучаемого тела в пространстве.
Реакция связи- сила, с которой мех. связь действует на изучаемое тело.
Классификация связи: в тер. механ. все механ. связи делятся на типы. Тип связи определяется по тому признаку, как направлена реакция этой связи:
а)гладкая поверхность. Направл. перпендикулярно касательной к соприкасающимся поверхностям. Реакция этой связи чаще всего называется нормальной реакцией [N].
При опирании на точку реакция перпендикулярна изучаемому телу.
б)шероховатая поверхность. Сила трения всегда перпендикулярна норм. реакции.
4)Аксиомы статики.
1. Аксиома инерции
Под действием уравновешенной системы сил материальная точка (тело) находится в состоянии покоя или движется равномерно и прямолинейно.
2. Аксиома равновесия двух сил
Абсолютно твердое тело находится в равновесии под действием двух сил тогда и только тогда, когда эти силы равны по модулю, действуют по одной прямой и направлены в противоположные стороны.
3. Аксиома присоединения и исключения уравновешивающихся сил
Не нарушая состояния абсолютно твердого тела, к нему можно прикладывать или отбрасывать от него уравновешенную систему сил.
4. Аксиома параллелограмма сил
Две силы, приложенные к телу в одной точке, имеют равнодействующую, проходящую через эту точку и равную их геометрической сумме.
5. Аксиома равенства действия и противодействия
Силы взаимодействия двух тел равны по модулю и направлены по одной прямой в противоположные стороны.
6. Аксиома о сохранении равновесия сил, приложенных к деформируемому телу
Равновесие деформируемого тела не нарушится, если это тело отвердеет
5) Проекция силы на оси.
Проекция силы на ось – это алгебраическая величина, равная произведению модуля силы на косинус угла между положительным направлением оси и вектором силы (т.е. это отрезок, откладываемый силой на соответствующие оси. Рисунок 1.13):
Fx= Fcosα;
Px= Pcosβ= P⋅ cos90o=0;
Rx= Rcosγ = -R⋅ cos(180o-γ).
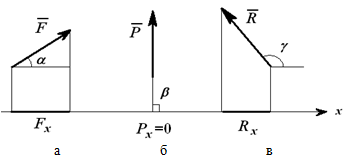
Рисунок 1.13
Проекция силы на ось может быть положительной, рис. 1.13а (0 ≤ α < π/2), равной нулю, рис. 1.13б (β = π/2 ) и отрицательной, рис. 1.13в (π/2 < γ ≤ π).
Иногда для нахождения проекции силы на ось сначала нужно найти ее проекцию на плоскость, а потом проекцию на ось (рисунок 1.14):
Pz= P sinα;
Px= (P cosα)cosβ;
Py= (P cosα)cosγ = P cosα⋅ cos(90o-β).
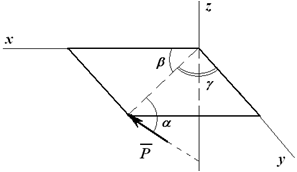
Рисунок 1.14