

2.4.3. Модели с раскрытой структурой
Общие сведения. Структура системы – совокупность элементов и причинно-следственные связи направленного действия между ними. Понятия системы и структуры близки по смыслу, хотя и вложены друг в друга: мы говорим о структуре системы, а не наоборот. Отношения этих понятий эквивалентны отношениям на множествах, а наиболее понятным средством представления этих отношений являются графы – универсальный аппарат описания структур систем.
Граф – это система некоторых объектов вместе с парами этих объектов, отображающая отношение между ними. Графами удобно изображать различные диаграммы, системы отношений, структурные химические формулы и т. п.
Более
строго, графом G
называется система (V,
U,
ф),
где V={v}–
множество вершин, U={u}
– множество ребер, ф
– функция инциденции, ставящая в
соответствие каждому ребру
![]() упорядоченную вершину (или упорядоченную
пару вершин
упорядоченную вершину (или упорядоченную
пару вершин
![]() ,
называемых концами ребра).
,
называемых концами ребра).
При небольшом числе элементов и связей используются диаграммы графов, т.е. их геометрические образы. Они представляют топологию системы. Топология позволяет выявить существенные свойства систем даже без раскрытия свойств вершин и дуг, которые обнаруживаются при дальнейшем раскрытии свойств системы за счет уточнения структур операторов-вершин и связей-дуг. Существует довольно большое число типов графов: ориентированные, плоские и т.д.
В зависимости от подхода к моделированию систем и конкретного содержания элементов множества (набора элементов модели) и отношений (связей между элементами) модели с раскрытой структурой представляются структурными схемами, сигнальными графами, системами дифференциальных уравнений в причинно-следственной форме и некоторыми другими средствами.
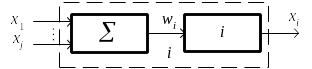
Структурные графы. Структурная схема – графическое отображение причинно-следственной связи звеньев. В односвязных системах любое звено может иметь некоторое число входов (рис. 2.23, а), оно преобразует их функциональную сумму в единственную переменную выхода в соответствии с некоторым оператором (рис. 2.23, б). В многосвязной системе выходные переменные составляют некоторое множество.
![]()
а б
Рис. 2.23. Представление звена системы: а – структурное, б – функциональное
В частном случае оператора тождественного преобразования звено выступает как сумматор.
С
точки зрения теории графов структурная
схема является ориентированным
графом
![]() ,
определяемым парой множеств: множеством
вершин
,
определяемым парой множеств: множеством
вершин
![]() и множеством дуг
и множеством дуг
![]() ,
связывающих пары вершин. Вершины
соответствуют звеньям, а дуги – связям.
Вершина – это звено общего вида,
суммирующее переменные всех входящих
дуг. Дуга – компонент, задающий
причинно-следственную связь между
звеньями. В итоге структурная схема
представляется структурным графом
(С-графом),
в котором отсутствуют звенья суммирования
(рис. 2.24).
,
связывающих пары вершин. Вершины
соответствуют звеньям, а дуги – связям.
Вершина – это звено общего вида,
суммирующее переменные всех входящих
дуг. Дуга – компонент, задающий
причинно-следственную связь между
звеньями. В итоге структурная схема
представляется структурным графом
(С-графом),
в котором отсутствуют звенья суммирования
(рис. 2.24).
Теоретико-множественное описание систем дает естественный способ ввода и редактирования систем управления как последовательного раскрытия их по рангам неопределенности. Моделью нулевого структурного ранга системы Ms(0) является все множество звеньев. Для графа,
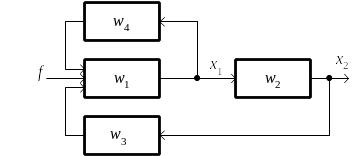
Рис 2.24. Структурный граф системы
приведенного на рис. 2.24, это множество перечисляется так:
W = {w1, w2, w3, w4}.
При однотипных звеньях можно ограничиться заданием мощности множества: │W│ = 4.
Дополнение модели Ms(0) множеством связей
X = {(1,3), (1,4), (2,1), (3,2), (4,1)},
где цифры означают номера звеньев, дает модель Ms(1) первого структурного ранга, т.е. модель топологии системы.
Дальнейшее раскрытие неопределенности состоит в задании операторов вершин, т.е. передаточных функций звеньев, определяемых отношениями полиномов
![]() .
.
Задание их структур сводится к указанию степеней ni и mi полиномов Ai и Bi, в результате образуется модель системы Ms(2) второго, т.е. структурного ранга. Если для рассматриваемого примера передаточные функции звеньев есть
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
то информацию о структурах операторов можно закодировать массивами степеней полиномов числителей и знаменателей передаточных функций: {0,0,0,1} и {0,2,0,1}.
Результат конкретизации значений всех коэффициентов полиномов – полностью определенная модель Ms(3) третьего, параметрического, ранга. В результате получаем описание автономной системы (т.е. собственно системы, вне связи со средой).
Для описания связей системы со средой необходимо указать звено, на которое подается входное воздействие, а также звено, выход которого является выходом системы.