

2.4.2. Модели «вход-выход»
Способы построения моделей «вход-выход». Как было показано выше, основными формами представления операторов преобразования входных переменных f(t) в переменные выхода y(t) в функциональном пространстве являются дифференциальные уравнения, передаточные функции, временные и частотные характеристики. Эти представления могут быть приняты за основу задания динамических свойств в терминах «вход-выход». Рассмотрим применение их для построения моделей линейных систем управления.
Построение моделей «вход-выход» по системе дифференциальных уравнений. Пусть задана система дифференциальных уравнений
![]() ;
;
![]() .
.
Построение модели в терминах «вход-выход» означает исключение внутренних переменных и получение прямой зависимости выхода от входа. Это проще сделать, если перейти к алгебраической форме уравнений, приняв начальные условия нулевыми:
![]() ; (2.33)
; (2.33)
![]() .
.
Построение модели по этой системе уравнений можно выполнить различными способами. Рассмотрим некоторые из них.
Последовательное исключение переменных применяется при небольшом числе уравнений системы (2.33). Пусть имеем объект с одним входом f, одним выходом y и двумя внутренними переменными x1 и x2. Описывающая его система уравнений имеет вид
 (2.34)
(2.34)
где Aij – компоненты матрицы А.
Опуская оператор отображения p, из второго уравнения (2.34) получаем
![]() .
.
Подставим полученное выражение в первое уравнение (2.34) и определим выражение для выхода
![]() .
.
Отсюда выражение для передаточной функции есть
![]() . (2.35)
. (2.35)
По выражению (2.35) уже легко получить полиномы числителя и знаменателя передаточной функции и записать выражение для одного дифференциального уравнения.
Пример 2.19. Запишем, например, предыдущую систему дифференциальных уравнений в матричной форме
![]() ;
;
![]() .
.
Определяем характеристический полином
![]() ;
;
Числитель
передаточной функции
![]() определяется как детерминант матрицы
определяется как детерминант матрицы
![]() при замене ее второго столбца столбцом
свободных членов
при замене ее второго столбца столбцом
свободных членов
![]() .
.
Тогда выражение для передаточной функции получается снова в виде (2.35).
▄
Матричный способ применяется при построении моделей многомерных систем. Пусть имеем систему алгебраических уравнений:
![]() ,
,
![]() .
.
Передаточная матрица системы в общем случае выражается как
![]() . (2.36)
. (2.36)
При этом полиномиальная матрица системы A должна быть неособенной (т.е. ее определитель не равен тождественно нулю). Поскольку
![]() , (2.37)
, (2.37)
где
![]() – присоединенная матрица, то выражение
для передаточной функции приобретает
вид
– присоединенная матрица, то выражение
для передаточной функции приобретает
вид
![]() .
.
Пример 2.19. Характеристический полином A(p) для системы из предыдущего примера уже вычислен. Присоединенная матрица для матрицы A выглядит так:
![]() .
.
Числитель передаточной функции вычислим, используя (2.36)
![]() .
.
Для одномерной системы (k = r = 1) полиномиальную матрицу числителя передаточной матрицы можно также вычислять как определитель блочной матрицы
![]() . (2.38)
. (2.38)
Определитель блочной матрицы (2.38) для нашего примера равен
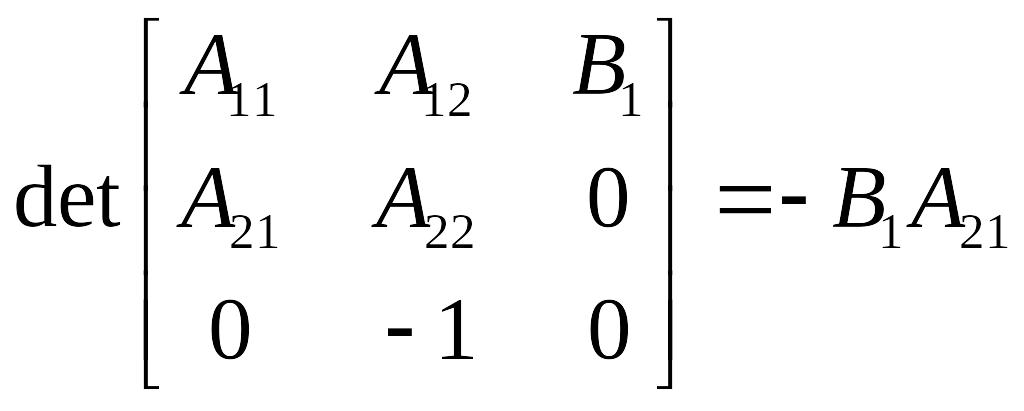 ,
,
т.е. имеет значение, совпадающее со значением из предыдущего примера.
■