

2.3.1. Дифференциальные уравнения в форме Коши
Задача Коши. Задача Коши, как известно из курса математики, состоит в задании системы дифференциальных уравнений в нормальной форме (разрешенных относительно первой производной) и задании для них граничных (начальных) условий в одной точке.
Использование формы Коши определяется тем, что при решении дифференциальных уравнений удобнее иметь дело не с уравнениями высокого порядка (выше первого), а с системами уравнений первого порядка.
Рассмотрим скалярный объект, поведение которого в динамике описывается дифференциальным уравнением n-го порядка
![]() . (2.17)
. (2.17)
Произведем в этом уравнении замену переменных следующим образом:
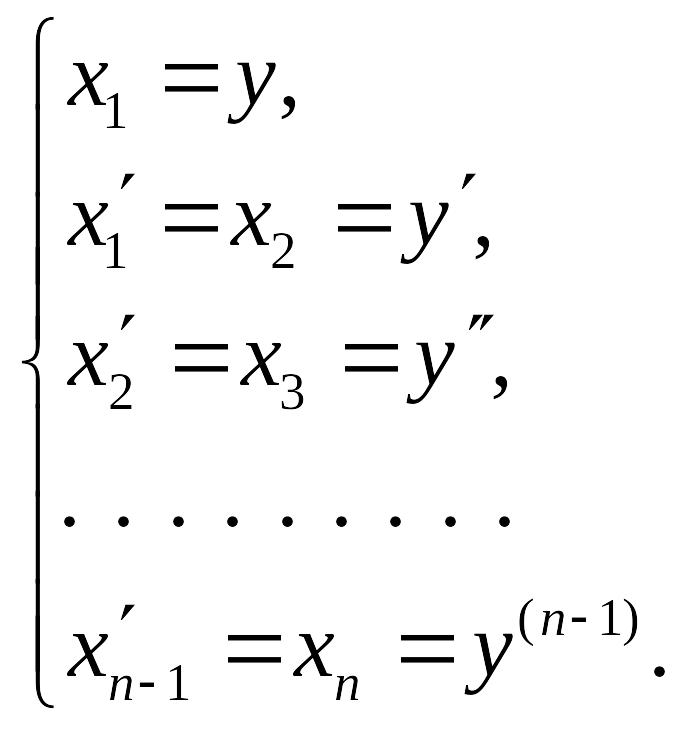 (2.18)
(2.18)
и разрешим исходное уравнение относительно старшей производной
![]()
или
![]() . (2.19)
. (2.19)
Совокупность уравнений (2.18) и (2.19) представляют нормальную форму Коши дифференциального уравнения (2.17). В общем виде полученная система представляется как
![]() (2.20)
(2.20)
где
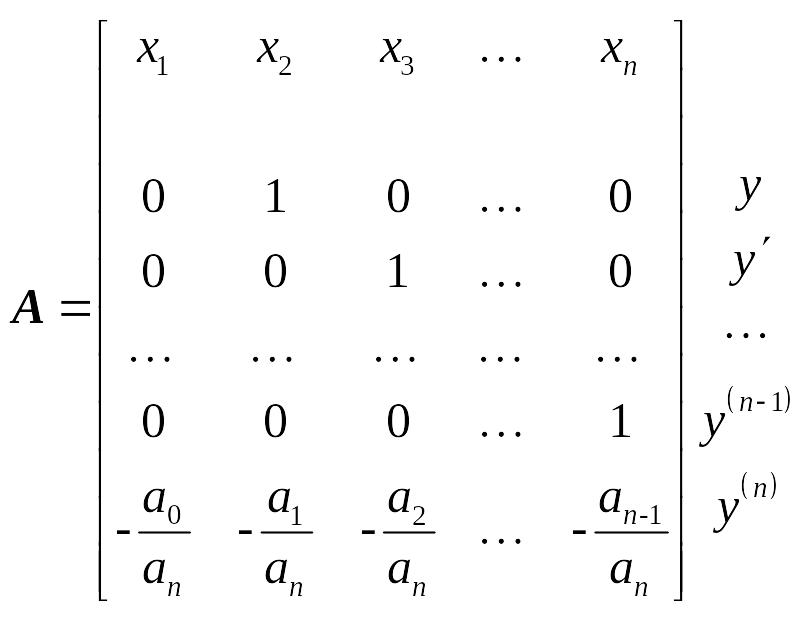
есть матрица Фробениуса, а матрица

определяет влияние входного воздействия на состояние объекта.
Значение выходного сигнала y объекта определяется в общем случае как состоянием объекта x, так и значением входного воздействия u, так что
![]() .
.
В общем случае А − функциональная матрица размером n × n, называемая матрицей состояния системы (объекта), В − функциональная матрица размером n × r, называемая матрицей управления (входа), С − функциональная матрица размером m × n, называемая матрицей выхода по состоянию, D − функциональная матрица размером m × r, называемая матрицей выхода по управлению.
Очень часто D = 0, т.е. выход непосредственно зависит от входа и тогда исходная система уравнений приобретает вид
![]() (2.21)
(2.21)
Пример 2.6. Представить дифференциальное уравнение
![]()
в форме Коши.
Решение. Вводим новые переменные
![]() ,
,
откуда с учетом исходного уравнения следует
![]()
Таким образом, представление исходного уравнения в виде (2.20) приводит к формированию следующих матриц:
![]()
![]()
![]()
■
Пример 2.7. Преобразовать полученное дифференциальное уравнение второго порядка для механической системы (рис. 2.7) в форму Коши.
Решение. Заменим наблюдаемую переменную y на переменную состояния x1:
![]() (2.21)
(2.21)
Тогда уравнение (2.8) примет следующий вид:
![]()
![]() (2.22)
(2.22)
Если уравнение (2.22) разделить относительно производных и проинтегрировать по времени, получим уравнение первого порядка
![]() .
.
Обозначим
![]() .
(2.23)
.
(2.23)
Продифференцируем последнее выражение
![]() .
(2.24)
.
(2.24)
В итоге получилось два уравнения первого порядка (2.23) и (2.24), дающие описание динамики системы. Совокупность полученной системы уравнений
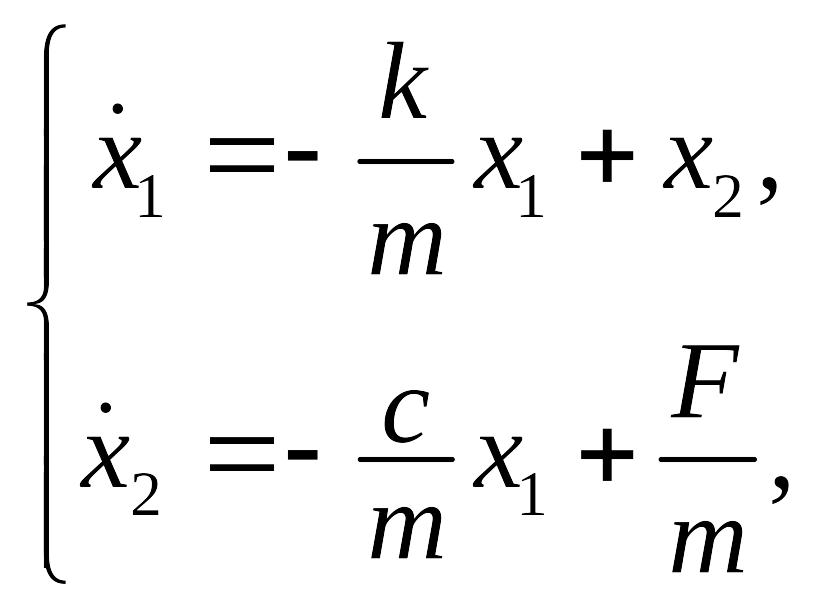 (2.25)
(2.25)
совместно с уравнением (2.21), называемым уравнением наблюдения, составляет полное описание поведения объекта в форме Коши.
■
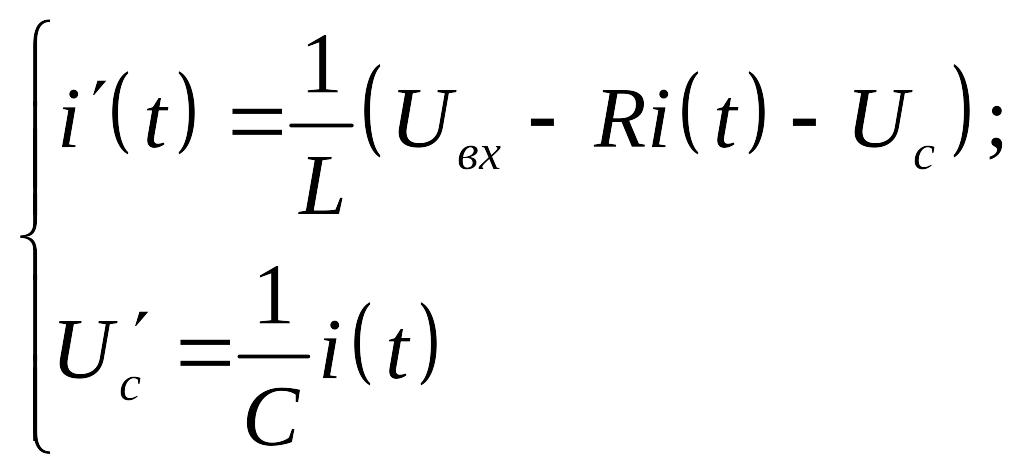
Пример 2.8. Перейти к стандартной форме Коши для рассмотренной
выше электрической системы (рис. 2.1), описываемой системой уравнений
![]() ;
;
![]() .
.
Решение. Пусть
![]() ;
;
![]() ,
,
тогда из второго уравнения получаем
![]() .
.
Используя теперь полученное соотношение, запишем первое уравнение в виде
![]() .
.
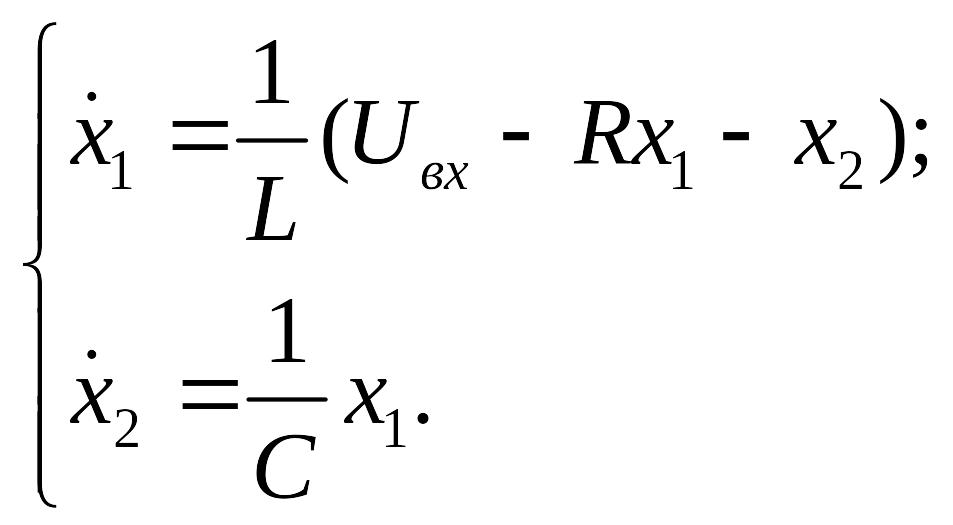
В результате получаем систему из двух уравнений первого порядка
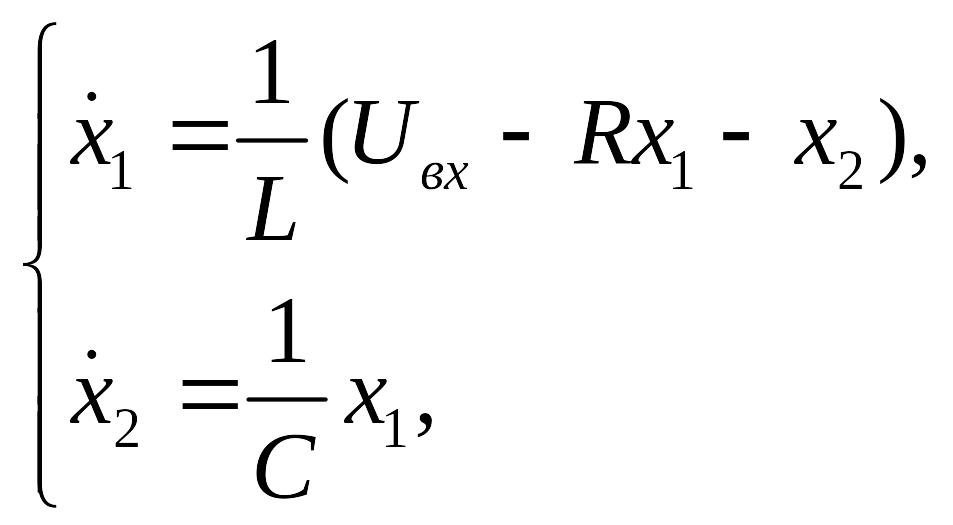
с уравнением наблюдения
![]() .
.
■
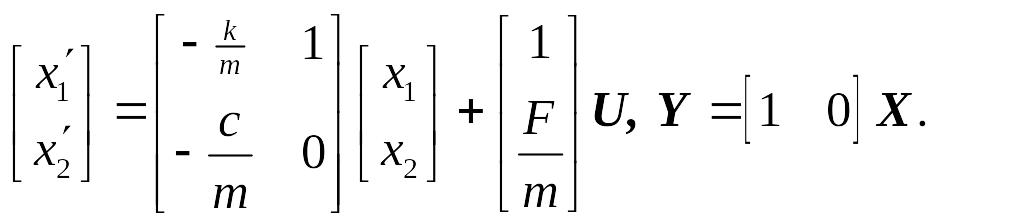
Пример 2.12. Рассмотрим полученную выше систему дифференциальных уравнений механической системы (1.45)
,
и представим ее в матричной форме. Она должна принять вид (2.20):
где:
![]() – вектор
состояния, размерности 2,
– вектор
состояния, размерности 2,
u – в данном случае, скалярное управление (в общем случае это тоже вектор),
y – в данном случае, также скалярное наблюдение (в общем случае – также вектор).
Сравнивая исходную систему уравнений и конечную форму, видим, что
 ,
,
следовательно, исходная система уравнений запишется в матричной форме в виде:
Для решения этой системы уравнений не хватает начальных условий, которые, конечно же, существуют, но не обязательно известны исследователю. Будем считать, что начальные условия известны, и они заданы в одной точке:
![]()
Пример
2.13.
Получим уравнения состояния для
простейшей RLC-цепи,
показанной на рис 1.21. Динамическое
поведение этой системы при t
≥ t0
полностью определяется, если известны
начальные значения i(t0),
Uc(t0)
и входное напряжение U(t).
Следовательно,
![]() и
и
![]() можно
выбрать в качестве переменных состояния,
то есть
можно
выбрать в качестве переменных состояния,
то есть
![]() ,
,
![]() .
Тогда совокупность исходных уравнений
.
Тогда совокупность исходных уравнений
может быть представлена в виде
Полученные дифференциальные уравнения можно записать в векторно-матричной форме
![]()
Таким образом для рассматриваемой системы матрицы А, В, С векторно-матричной модели будут иметь следующий вид:
![]() ;
;
![]() ;
;
![]() .
.
■
Матричное описание строго формализовано, и не требует понимания физической природы системы. Так же структура модели в "пространстве состояний" не позволяет разобраться во внутренней природе системы. Если эта форма записи дифференциальных уравнений применена обоснованно, то модель, скорее всего, будет истинной.
Передаточная функция в пространстве состояний. Пусть система или какое-либо звено ее в пространстве состояний описываются системой дифференциальных уравнений вида:
![]()
![]() ,
(2.26)
,
(2.26)
причем для реальных объектов n > m.
Первое уравнение (2.26) можно записать в операторной форме
![]() ,
,
откуда
![]()
или
![]()
где
 – единичная
матрица,
– единичная
матрица,
![]() .
.
Отсюда
![]() ,
,
где
![]() – обратная матрица
– обратная матрица
![]() .
.
С учетом второго уравнения (2.26) получаем
![]() .
.
В последнем выражении
![]() (2.27)
(2.27)
есть
передаточная функция (функция оператора
от p),
![]() ,
т.к. y
и u
имеют m
компонент.
,
т.к. y
и u
имеют m
компонент.
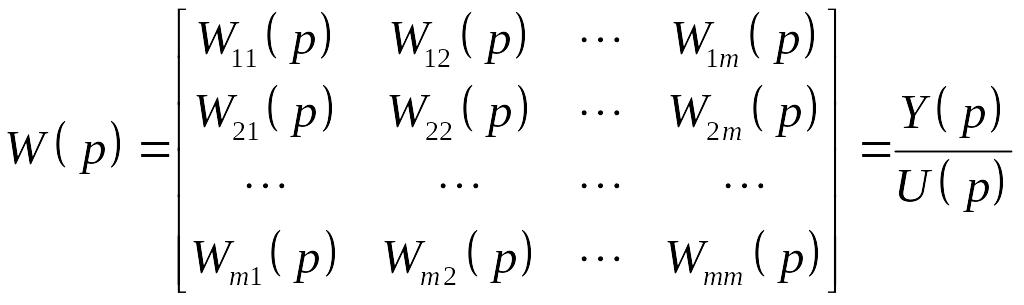
Матричная передаточная функция показывает, какими операторными выражениями связаны между собой компоненты вектора y и u.
![]() .
.
Если
все uj
= 0 и i
j
то
![]() .
.
Wii(p) – собственная передаточная функция i-го канала, отражает соотношение между i-м входом и выходом при нулевых остальных входах.
Если один из элементов матрицы передаточной функции равен 0, то это означает, что в рассматриваемой системе связь между соответствующими компонентами векторов y и u отсутствует.
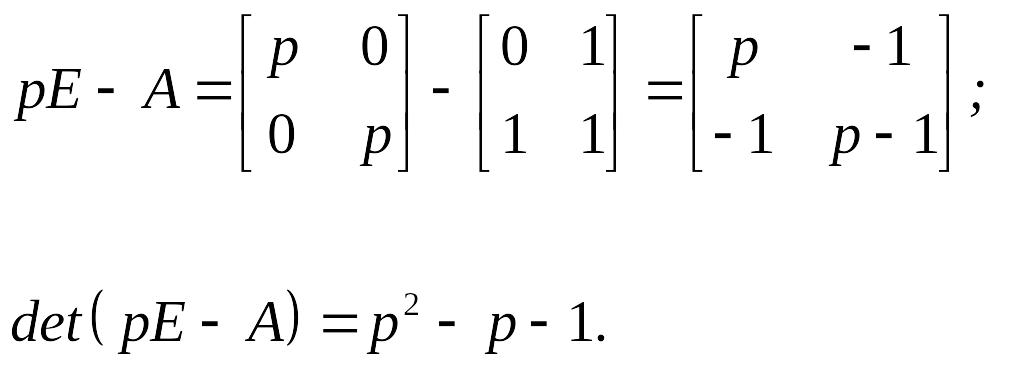
Пример 2.14. Пусть система описывается системой дифференциальных уравнений
![]()
![]()
Получить для нее передаточную функцию в форме пространства состояний и в функциональном пространстве.
Решение. Образующие матрицы этой системы есть
![]() .
.
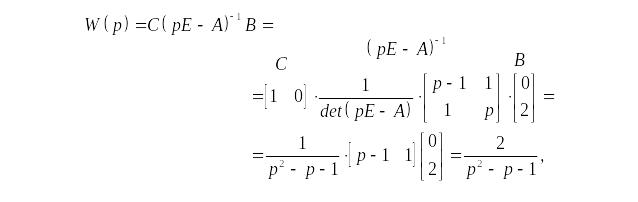
Передаточная функция системы по определению есть
![]()
где
Обратная матрица
![]() ,
,
в которой i, j-элемент получен из выражения
![]() ,
,
где Mij – минор i, j-элементов. Тогда
где
![]() –
характеристический
полином системы;
–
характеристический
полином системы;
![]() –
характеристическое
уравнение системы;
–
характеристическое
уравнение системы;
Теперь рассмотрим решение этой задачи в функциональном пространстве. Дифференциальное уравнение системы
![]()
в изображениях по Лапласу представляется в виде:
![]() ,
,
откуда
![]() .
.
■
Построение временных характеристик в форме пространства состояний. Преобразовав по Лапласу систему дифференциальных уравнений системы управления (2.14), получим систему операторных уравнений
![]()
и выражение для изображения вектора состояния
![]() . (2.28)
. (2.28)
Первое слагаемое (2.28) определяет свободное движение системы, а второе – ее вынужденное движение.
Для
получения оригинала (т.е. функции
времени![]() )
необходимо выполнить обратное
преобразование Лапласа. Оригинал
скалярной функции с изображением:
)
необходимо выполнить обратное
преобразование Лапласа. Оригинал
скалярной функции с изображением:
![]()
имеет, как нам уже известно, вид экспоненты
![]() .
.
В матричном случае его аналог
![]()
является матричной экспонентой, называемой матрицей перехода.
Произведению изображений соответствует свертка оригиналов, поэтому вектор состояния как функция времени получается из (2.28) в виде
![]()
Изображение
переменной выхода при нулевых начальных
условиях
![]() определяется
подстановкой второго слагаемого (2.28)
во второе уравнение системы (2.26), т.е. в
определяется
подстановкой второго слагаемого (2.28)
во второе уравнение системы (2.26), т.е. в
![]()
![]() . (2.28,а)
. (2.28,а)
При подаче на вход системы единичного импульса (U(p) = 1) реакция системы (импульсная переходная функция) выглядит так:
![]() . (2.29)
. (2.29)
Сравнивая последнее выражение с выражением для передаточной функции (2.27), видим, что
![]() .
.
Следовательно,
матрицу перехода можно получать путем
обращения по Лапласу матрицы
![]() .
.
Пример 2.17. Пусть имеем матрицу состояний нормальной формы
![]() .
.
Характеристическая матрица запишется как
![]() ,
,
а ее обращение есть
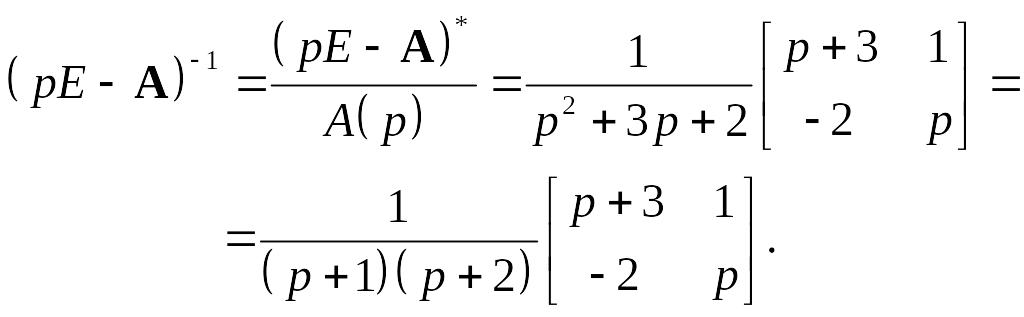 .
.
Применение обратного преобразования Лапласа к каждому элементу полученной матрицы приводит к получению матрицы перехода
![]() .
.
Отсюда по формуле (2.29) при известных матрицах входа B = [0 1]т и выхода C = [2 0] находится функция веса
C B
![]() .
.
■
Переходная характеристика h(t) есть интеграл от функции веса
![]() .
.
Построение временных характеристик в форме пространства состояний связано с вычислением матричного экспоненциала (матрицы перехода Ф(t)). Приведенный пример демонстрирует получение элементов Ф(t) путем обратного преобразования Лапласа.
Еще одним способом численного получения значений матрицы перехода при фиксированных значениях t является разложение матричного экспоненциала в степенной ряд
![]() .
.
Частотные характеристики в форме пространства состояний. Для системы, описываемой системой уравнений (2.26) выходной сигнал может быть описан выражением
![]() .
.
где
![]()
(см. выражение 2.28, а).
Тогда выражения для амплитудной и фазовой частотных характеристик приобретают вид:
![]() ,
,
![]() .
.
Лекция 7