

14.6. Ускорения точек тела при плоском движении
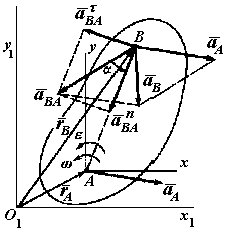
Теорема. Ускорение какой-либо точки плоской фигуры при плоском движении равно векторной сумме ускорения полюса и ускорения этой точки от вращательного движения плоской фигуры вокруг полюса.
|
Относительное
ускорение
Ускорение
от относительного вращательного
движения вокруг полюса, как и в случае
вращения тела вокруг неподвижной оси,
состоит из касательной и нормальной
составляющих
|
Рис. 50 |
![]()
причем
![]() ,
,
![]()
и
![]()
Касательное
относительное ускорение
направлено по перпендикуляру к отрезку
АВ в
сторону дуговой стрелки углового
ускорения
.
Нормальное относительное ускорение
соответственно направлено по линии АВ
от точки В
к полюсу А.
Наконец, полное относительное ускорение
![]() составляет с отрезком АВ
угол
составляет с отрезком АВ
угол
![]() ,
тангенс которого можно определить по
формуле
,
тангенс которого можно определить по
формуле
 .
.
Угол
для всех точек плоской фигуры одинаков.
При
![]() угол
от ускорения
к отрезку ВА
надо откладывать против часовой стрелки.
При
угол
от ускорения
к отрезку ВА
надо откладывать против часовой стрелки.
При
![]() его надо откладывать по часовой стрелке,
т. е. во всех случаях, независимо от
направления вращения фигуры, угол
всегда надо откладывать в направлении
дуговой стрелки углового ускорения. В
соответствии с полученными формулами
можно построить в выбранном масштабе
многоугольник ускорений для точки В.
его надо откладывать по часовой стрелке,
т. е. во всех случаях, независимо от
направления вращения фигуры, угол
всегда надо откладывать в направлении
дуговой стрелки углового ускорения. В
соответствии с полученными формулами
можно построить в выбранном масштабе
многоугольник ускорений для точки В.
14.7. Мгновенный центр ускорений
Мгновенным центром ускорений называется точка плоской фигуры, ускорение которой в данный момент времени равно нулю.
Теорема. В каждый момент времени при плоском движении фигуры в ее плоскости, если и не равны нулю одновременно, имеется единственная точка этой фигуры, ускорение которой равно нулю.
15. Вращение твердого тела вокруг неподвижной точки.
Вращением твердого тела вокруг неподвижной точки называют такое движение, при котором одна точка тела остается все время неподвижной.
Это движение часто называют сферическим движением твердого тела потому, что траектории всех точек тела при таком движении располагаются на поверхностях сфер.
Тело
имеет три степени свободы, т.к. закрепление
одной точки тела уменьшает число степеней
свободы на три единицы (![]() ).
).
15.1. Углы Эйлера
|
Положение
подвижной системы координат относительно
неподвижной определяется тремя углами
(рис. 51). Угол прецессии
Линия
пересечения подвижной плоскости
с неподвижной
|
Рис. 51 |
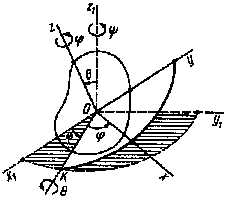
Для
изменения этого угла тело должно
вращаться вокруг оси
![]() ,
которую называют осью
прецессии. Угол
нутации
- это угол между осями
и
,
которую называют осью
прецессии. Угол
нутации
- это угол между осями
и
![]() .
При изменении угла
происходит поворот тела вокруг линии
узлов, которую также называют осью
нутации.
.
При изменении угла
происходит поворот тела вокруг линии
узлов, которую также называют осью
нутации.
Угол
собственного вращения
- это угол между линией узлов и подвижной
осью
![]() .
При изменении угла
тело вращается вокруг оси
(оси собственного вращения).
.
При изменении угла
тело вращается вокруг оси
(оси собственного вращения).
Для определения положения тела с одной неподвижной точкой в любой момент времени необходимо задать углы Эйлера как однозначные функции времени, т.е.
![]() ,
, ![]() ,
, ![]() .
.
Эти уравнения называются уравнениями вращения твердого тела вокруг неподвижной точки.
Твердое тело, имеющее одну неподвижную точку, можно из одного положения перевести путем поворота в другое, бесконечно близкое первому. Поворот осуществляется вокруг оси, которую называют мгновенной осью вращения (или мгновенной осью) для данного момента времени.