

11.3 Скорость точки
Одной из основных характеристик движения точки является ее скорость относительно выбранной системы отсчета.
Положение
движущейся точки М
относительно системы отсчета в момент
времени
определяется радиус-вектором
![]() .
.
Скорость точки при векторном способе задания движения
|
В
другой момент времени
|
Рис. 30 |
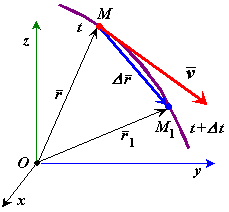
Скорость точки равна первой производной по времени от ее радиус-вектора,
![]() .
.
Скорость точки при координатном способе задания движения
Скорость точки раскладывается на составляющие, параллельные осям координат:
![]() .
.
Проекции скорости на оси координат определяются так:
![]() ,
,
![]() ,
,
![]() .
.
Проекция скорости точки на какую-либо координатную ось равна первой производной по времени от соответствующей координаты этой точки.
Модуль скорости и направляющие косинусы равны:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Скорость точки при естественном способе задания движения.
Скорость
точки задана естественным способом,
т.е. заданы траектория точки и закон ее
движения по траектории
![]() (рис. 31).
(рис. 31).
Скорость точки определяется следующим образом:
![]() ,
,
![]() - единичный вектор,
направленный по касательной к траектории
в сторону возрастающих расстояний.
- единичный вектор,
направленный по касательной к траектории
в сторону возрастающих расстояний.
|
При
При
|
Рис. 31 |
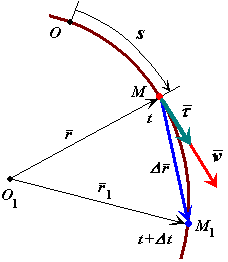
![]() -
алгебраическая
скорость точки,
проекция скорости
-
алгебраическая
скорость точки,
проекция скорости
![]() на положительное направление касательной
к траектории.
на положительное направление касательной
к траектории.
Естественное задание движения точки полностью определяет скорость по величине и направлению.
11.4. Геометрические понятия Кривизна и радиус кривизны кривой
Траектория точки является некоторой кривой линией в пространстве. В точке М кривой линии проведем касательную М. В точке М1 построим касательную М11. Между точками М и М1 расстояние s, измеренное вдоль дуги.
|
В общем случае пространственной кривой касательные М и М11 будут скрещиваться. Проведем через точку М прямую линию М2, параллельную М11 Угол между линиями М и М2 называется углом смежности (рис. 32).
|
Рис. 32 |
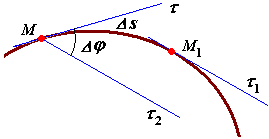
Кривизной
кривой
(обычно обозначается буквой
![]() )
в точке М называется предел отношения
угла смежности к расстоянию s,
при s
стремящемся к нулю, т.е.
)
в точке М называется предел отношения
угла смежности к расстоянию s,
при s
стремящемся к нулю, т.е.
|
Радиусом кривизны кривой (обычно обозначается буквой ) в точке М называется величина, обратная кривизне кривой в этой точке, т.е.
|
Рис. 33 |
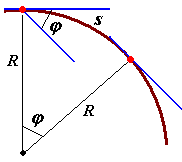
Радиус
кривизны дуги окружности радиуса R
равен R.
Дуга окружности длиной s,
опирается на центральный угол
и равна
![]() ,
следовательно
,
следовательно
![]() (рис. 33).
(рис. 33).