

28.Порядок расчета режима синхронного генератора при несинхронной частоте его вращения.
Рассмотрим условия работы системы, которая состоит из синхронного генератора, ротор которого вращается с постоянной угловой частотой , отличной от синхронной , и шин неизменного по величине и частоте напряжения.
 Принципиальная
схема исследуемой системы приведена
на рис.9.6, векторная диаграмма – на
рис.9.7.
Принципиальная
схема исследуемой системы приведена
на рис.9.6, векторная диаграмма – на
рис.9.7.
Рис.9.6. Схема простейшей системы
При
построении векторной диаграммы
предполагается, что при некотором
значении
,
начиная от
![]() частота вращения вектора э.д.с
изменяется и становится равной
,
вместо
.
При этом модуль вектора
частота вращения вектора э.д.с
изменяется и становится равной
,
вместо
.
При этом модуль вектора
![]() угол
угол
![]() .
.
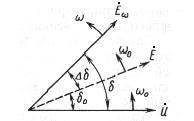
Рис.9.7. Векторная диаграмма системы
Здесь
из векторной диаграммы имеем
![]() и учитывая, что скольжение
и учитывая, что скольжение
![]() ,
получим
,
получим
![]() .
.
Таким
образом,
![]() ,
(9.1)
,
(9.1)
если отсчет времени ведется с момента изменения .
 При
увеличении угловой частоты ротора сверх
синхронной и росте угла
(
При
увеличении угловой частоты ротора сверх
синхронной и росте угла
(![]() )
скольжение получает отрицательное
значение (генераторный режим) (см.
рис.9.8).
)
скольжение получает отрицательное
значение (генераторный режим) (см.
рис.9.8).
Рис.9.8. Характер изменений угловой частоты вращения и скольжения
Укажем основные особенности процессов, происходящие при несинхронной работе синхронного генератора:
1. В машине и линии передачи циркулирует ток, имеющий слагающие двух частот и .
2. Синхронная машина одновременно приобретает свойства асинхронной, так как во всех короткозамкнутых обмотках ротора появляются токи, обусловленные наличием скольжения.
3. Появляются изменения параметров режима синхронной машины и параметров других элементов передачи:
а)
э.д.с.
![]() зависит от скольжения;
зависит от скольжения;
б)
созданные ею составляющие токов с
частотой
прооходят через реактивные сопротивления,
изменяющиеся для этих токов в отношении
![]() и приобретающие новые значения
и приобретающие новые значения
![]() .
.
Поставленная задача определения статических характеристик мощности при несинхронной работе генератора, сводящаяся к определению токов, мощностей и вращающих моментов, может быть решена тремя способами.
Первый способ основывается на предположении о возможности разделения рассматриваемой машины на две – синхронную и асинхронную, создающие общий вращающий момент .
Синхронная
машина, связанная с напряжением
,
работает с частотой
,
имеет э.д.с.
и развивает вращающий момент
![]() .
Асинхронная машина присоединена к шинам
напряжения
,
работает со скольжением
.
Асинхронная машина присоединена к шинам
напряжения
,
работает со скольжением
![]() ,
развивает вращающий момент
,
развивает вращающий момент
![]() и является, в зависимости от знака
скольжения, асинхронным двигателем или
асинхронным генератором, как это показано
на рис.9.9.
и является, в зависимости от знака
скольжения, асинхронным двигателем или
асинхронным генератором, как это показано
на рис.9.9.
 Рис.9.9.
Разделение несинхронно работающей
синхронной машины
Рис.9.9.
Разделение несинхронно работающей
синхронной машины
на две механически связанные: синхронную и асинхронную
Подчеркнем,
что при этом параметры машины
,
как асинхронной, будут определяться
всеми короткозамкнутыми обмотками ее
ротора; сопротивление сети
![]() в простейшем случае будет введено в
цепь статора каждой машины. Это , конечно,
возможно только при грубых расчетах
первого приближения.
в простейшем случае будет введено в
цепь статора каждой машины. Это , конечно,
возможно только при грубых расчетах
первого приближения.
Заметим, что при первом способе можно получить выражения мощностей с помощью схем замещения, пользуясь методом наложения и определяя токи в каждой ветви.
Второй
способ
нахождения параметров режима (токов,
мощностей) при работе с несинхронной
частотой сводится к определению
дополнительных э.д.с., наводимых в каждой
обмотке ротора, и некоторой новой э.д.с.
(![]() или
или
![]() ),
действующей в схеме замещения машины.
),
действующей в схеме замещения машины.
Третий способ заключается в применении полных уравнений синхронной машины (уравнения Парка-Горева), позволяющих учесть все изменения частоты вращения и обусловленные ими изменения э.д.с. и моментов.
Рассмотрим первый простейший способ определения вращающих моментов согласно схеме, показанной на рис. 9.9. Начнем с синхронного генератора , связанного с шинами . Схема замещения имеет вид, показанный на рис.9.10, где согласно методу наложения

![]()
Здесь
![]()
![]() .
.
Рис.9.10. Определение токов в несинхронно работающей синхронной машине
методом наложения
Мощности в начале и конце передачи могут быть найдены как
![]()
![]() .
.
При
определении э.д.с.
предполагается, что появившиеся при
независимом возбуждении, возникающие
в результате скольжения, дополнительные
(наведенные) токи учтены в условной
асинхронной машине
;
тогда
![]() Если ток возбуждения получается от
возбудителя и подвозбудителя, сидящих
на одном валу с генератором, то
Если ток возбуждения получается от
возбудителя и подвозбудителя, сидящих
на одном валу с генератором, то
![]() .
В общем случае можно записать
.
В общем случае можно записать
![]() .
.
С
учетом этого найдем
![]() .
(9.2)
.
(9.2)
Определим из (9.2) выражение для :
![]() =
=




![]() (9.3)
(9.3)
где
![]() ;
;
![]() .
.
Вращающий момент генератора при этом будет
![]() .
(9.4)
.
(9.4)
 Здесь
первое слагаемое момента , называемое
собственным
моментом
Здесь
первое слагаемое момента , называемое
собственным
моментом
![]() ,
получается при взаимодействии обмотки
ротора, питаемой э.д.с.
и обмотки статора, замкнутой на
сопротивление
,
получается при взаимодействии обмотки
ротора, питаемой э.д.с.
и обмотки статора, замкнутой на
сопротивление
![]() .
Его зависимость от скольжения при
.
Его зависимость от скольжения при
![]() показана на рис. 9.11 (характеристика 1).
показана на рис. 9.11 (характеристика 1).
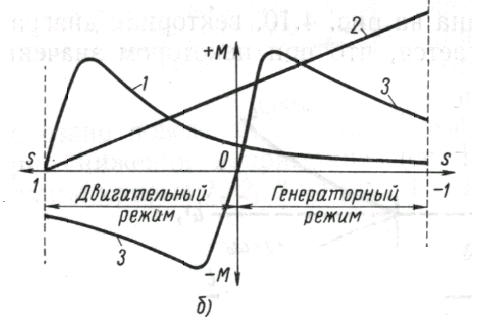
Рис.9.11. Зависимости составляющих момента
несинронно работающей синхронной машины от скольжения при
В
простейшем случае при
![]() ,
собственный момент
,
собственный момент
![]() ,
(9.4 а)
,
(9.4 а)
где
![]() .
.
Заметим, что формула (9.4 а) по своей структуре аналогична известной формуле момента (мощности) асинхронного двигателя.
При
член
превращается в так называемую собственную
мощность
![]() .
.
Второе
слагаемое в (9.4) назавается взаимным
моментом;
при
он превращается во взаимную
мощность
![]() .
Зависимость амплитуды взаимного момента
от скольжения при
дается характеристикой
на рис.9.11.
.
Зависимость амплитуды взаимного момента
от скольжения при
дается характеристикой
на рис.9.11.
Мнимая
часть комплекса
![]() ,
дает реактивную мощность
,
дает реактивную мощность
![]() ,
(9.5)
,
(9.5)
где
![]() .
.
В конце передачи значения активной и реактивной мощностей будут
![]() ;
(9.6)
;
(9.6)
![]() ,
(9.7)
,
(9.7)
где
![]()
![]() .
.
Разность
активных мощностей в начале и конце
передачи при непрерывном изменении
положения и величины вектора
![]() ,
оказывается, не равна потерям мощности
в активном сопротивлении
,
оказывается, не равна потерям мощности
в активном сопротивлении
![]() :
:
![]()
где
![]() -
дополнительные потери, связанные со
скольжением.
-
дополнительные потери, связанные со
скольжением.
Асинхронный момент.
Найдем теперь величину вращающего момента , развиваемого условно выделенной машиной (рис.9.9), которую при отрицательном скольжении считаем генератором, а при положительном – двигателем.
Если
предположить, что на роторе генератора
![]() имеется только одна обмотка возбуждения,
выполненная как равномерно распределенная,
то выражение вращающего момента можно
записать как:
имеется только одна обмотка возбуждения,
выполненная как равномерно распределенная,
то выражение вращающего момента можно
записать как:
 .
(9.8)
.
(9.8)
Здесь
![]() и
-
параметры схемы замещения асинхронного
двигателя, включая внешнее сопротивление
и
-
параметры схемы замещения асинхронного
двигателя, включая внешнее сопротивление
![]() .
.
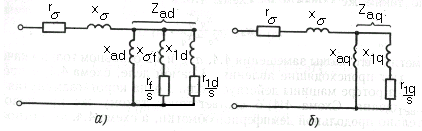 Для
перехода от параметров асинхронного
двигателя к параметрам синхронного
генератора, воспользуемся комплексной
схемой генератора , при- веденной на
рис.9.12.
Для
перехода от параметров асинхронного
двигателя к параметрам синхронного
генератора, воспользуемся комплексной
схемой генератора , при- веденной на
рис.9.12.
Рис.9.12. Комплексная схема замещения явнополюсной синхронной машины
с учетом демпферной обмотки: а) по продольной оси; б) по поперечной оси
Соответствущие частные схемы для определения реактивных сопротивлений, представляющих генератор в некоторых характерных режимах, приведены в графах (4.1)-(4.4), табл.9.1.
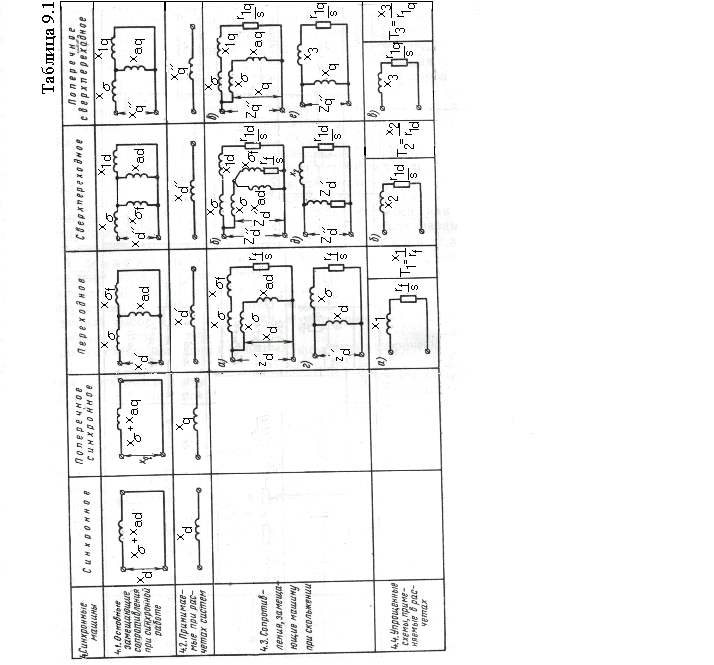 Эти
схемы предполагают, что синхронно
работающий генератор находится или в
начальной стадии переходного процесса
(
Эти
схемы предполагают, что синхронно
работающий генератор находится или в
начальной стадии переходного процесса
(![]() )
или в установившемся режиме (
)
или в установившемся режиме (![]() ).
При асинхронном режиме (работа при
скольжении
).
При асинхронном режиме (работа при
скольжении
![]() )
приближенные Г-образные частные схемы
для определения сопротивлений
)
приближенные Г-образные частные схемы
для определения сопротивлений
![]() получаются на основе схем , изображенных
на рис.9.12, принимая вид, показанный в
графе 4.3.
получаются на основе схем , изображенных
на рис.9.12, принимая вид, показанный в
графе 4.3.
Эти схемы аналогичны упрощенной Г-образной схеме замещения (рис.2.11) асинхронного двигателя.
Дальнейшее
упрощение заключается в отбрасывании
ветви намагничивания аналогично тому,
как это было сделано ранее для асинхронного
двигателя. После этого схемы приобретают
вид схем, приведенных в графе 4.4 (![]()
![]() ).
Входящие в них сопротивления
).
Входящие в них сопротивления
![]() можно выразить через основные параметры
синхронного генератора. Так, рассматривая
схему в графе 4.3 а
в предположении, что
можно выразить через основные параметры
синхронного генератора. Так, рассматривая
схему в графе 4.3 а
в предположении, что
![]() ,
а также учитывая,
,
а также учитывая,
![]() и
и
![]() ,
получим
,
получим
![]() ,
(9.9)
,
(9.9)
откуда
![]() .
(9.10)
.
(9.10)
Аналогично из схемы графы 4.3 б будем иметь
![]() .
(9.11)
.
(9.11)
И точно таким же образом из схемы графы 4.3 в
![]() .
(9.12)
.
(9.12)
Заметим, что схемы замещения, приведенные в графе 4.4 а, б и в в основном отражают только качественно происходящие процессы. В самом деле, схема 4.4 а предполагает, что на роторе машины действует только одна короткозамкнутая обмотка возбуждения. Схема 4.4 б сооответствует такому же предположению относительно продольной демпферной обмотки, а схема 4.4 в –относительно поперечной.
Возвращаясь
к определению момента
условно выделенной машины
и переходя, согласно (9.10) от параметров
двигателя к параметрам, характеризующим
синхронный генератор, и заменяя
;
![]() ,
получим
,
получим
 .
(9.8 а)
.
(9.8 а)
Зависимость
этого момента от скольжения представлена
на рис.9.11 характеристикой
![]() .
.
При
малых скольжениях иногда пренебрегают
величиной
![]() и грубо представляют
и грубо представляют
 (9.8 б)
(9.8 б)
Уточнение формул асинхронного момента
У
синхронного генератора обмотка
возбуждения расположена не равномерно
по всему ротору, как это было принято
при выводе (9.8 а),
а только по продольной оси. Кроме этой
обмотки, по этой же оси
действует продольная демпферная обмотка,
а по оси
![]() -
поперечная демпферная обмотка. Будем,
аналогично тому как это делалось при
выводе формулы (9.8), определять момент,
развиваемый в результате действия всех
трех одноосных обмоток, как половину
суммы моментов трех асинхроннывх машин,
у каждой их которых имеются соответствующие
распределенные обмотки (рис.9.13):
-
поперечная демпферная обмотка. Будем,
аналогично тому как это делалось при
выводе формулы (9.8), определять момент,
развиваемый в результате действия всех
трех одноосных обмоток, как половину
суммы моментов трех асинхроннывх машин,
у каждой их которых имеются соответствующие
распределенные обмотки (рис.9.13):