

21.Учет параметров синхронных машин в расчетах динамической устойчивости.
При решении проблемы динамической устойчивости приходиться иметь дело с переходными процессами, возникающими при аварии в электричес-
кой системе, например при к.з. В этих условиях характеристики и парамет-
ры схем замещения синхронных генераторов (и других синхронных машин) должны отражать влияние переходных электромагнитных процессов в их цепях.
Как известно, в начальный момент нарушения режима синхронная маши-
на может быть представлена переходной э.д.с. и переходной реактивностью (при отсутствии демпферных обмоток на роторе).
 Скачки
токов ротора (
)
и статора (
Скачки
токов ротора (
)
и статора (![]() )
в начальный момент к.з. показаны на
рис.7.10.
)
в начальный момент к.з. показаны на
рис.7.10.
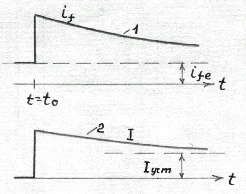
Рис.7.10. Изменения токов при к.з.:
1) тока возбуждения; 2) огибающей тока статора
В
дальнейшем свободный ток, появившийся
в цепи возбуждения и не поддерживаемый
напряжегнием возбудителя, начинает
затухать. Вместе с ним затухает и ток
статора. При этом ток возбуждения
стремиться к своему первоначальному
значению
![]() ,
пропорциональному напряжению возбудителя.
,
пропорциональному напряжению возбудителя.
По мере затухания свободного тока в цепи возбуждения реакция якоря проявляется полностью.Таким образом, замещение генератора переходным индуктивным сопротивлением в течение всего переходного процесса, вообще говоря, было бы неправильным.
Однако, можно указать такие условия, когда с затуханием свободных токов все же можно не считаться и ограничиться представлением генератора его переходным индуктивным сопротивлением не только в первый момент к.з., но и в течение определенного промежутка времени –практически в течение первого полуцикла качаний генератора.
Такие условия возникают прежде всего при быстром отключении к.з.
При длительности к.з. около нескольких десятых долей секунды, легко реализуемой современной релейной защитой и выключателями, и с учетом того, что постоянная времени, характеризующая затухание свободного т ока ротора, у крупных машин достигает нескольких секунд, свободные токи не успевают затухать сколько-нибудь значительно и реакция якоря не проявляется в большей мере, чем это отражается переходным индуктивным сопротивлением машины .
Те же выводы могут быть сделаны и при длительном к.з., если генератор снабжен регулятором, осуществляющем форсировку возбуждения.
Правда, свободный ток в обмотке возбуждения при длительном к.з. затухает весьма значительно, но это затухание компенсируется изменением вынужденного т ока возбуждения , пропорционального напряжению возбудителя и возрастающего вместе с ним под влияинием регулятора возбуждения (рис.7.11).
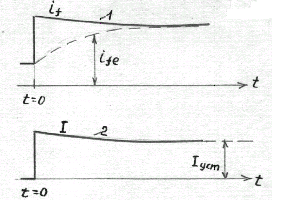 Рис.7.11.
Изменения токов при к.з. и наличии
автоматического регулятора напряжения:
Рис.7.11.
Изменения токов при к.з. и наличии
автоматического регулятора напряжения:
1) тока возбуждения; 2) огибающей тока статора
При
достаточной скорости подъема напряжения
возбудителя затухание результирующих
токов ротора (
)
и статора (![]() )
может быть полностью устранено и значение
тока статора в любой момент момент
времени будет определяться переходным
индуктивным сопротивлением
с тем же правом, что и для первого момента
к.з.
)
может быть полностью устранено и значение
тока статора в любой момент момент
времени будет определяться переходным
индуктивным сопротивлением
с тем же правом, что и для первого момента
к.з.
С
помощью переходного индуктивного
сопротивления генератора можно определять
не только токи к.з., но и токи нормального
режима, предшествовавшего к.з., если в
качестве э.д.с. генератора ввести э.д.с.
![]() , равную
, равную
![]() ,
то есть прибавляя к вектору поперечной
составляющей напряжения на шинах
генератора в нормальном режиме вектор
падения напряжения в переходном
индуктивном сопротивлении от продольной
состав-
,
то есть прибавляя к вектору поперечной
составляющей напряжения на шинах
генератора в нормальном режиме вектор
падения напряжения в переходном
индуктивном сопротивлении от продольной
состав-
ляющей
тока статора нормального режима
![]() .
.
Если
пренебречь влиянием активных сопротивлений,
то при к.з. на шинах генератора, работавшего
до того в режиме холостого хода, ток
к.з.
![]() отстает на
от вектора э.д.с.
и вектор тока
совпадает с продольной осью машины
отстает на
от вектора э.д.с.
и вектор тока
совпадает с продольной осью машины
![]() ,
то есть
,
то есть
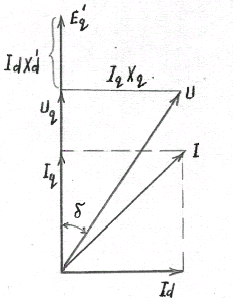
![]() (рис.7.12).
Поперечная составляющая тока к.з. при
этом отсутствует.
(рис.7.12).
Поперечная составляющая тока к.з. при
этом отсутствует.
 Рис.7.12.
Векторная диаграмма при к.з.
Рис.7.12.
Векторная диаграмма при к.з.
Именно эти условия, когда переходный процесс протекает в продольной оси, и рассматривались выше.
Известно, что в переходном процессе претерпевают изменения как продольная, так и поперечная составляющие тока статора.
В связи с отсутствием замкнутых обмоток в поперечной оси машины (если не считаться с наличием демпферной обмотки) магнитный поток реакции якоря в ее поперечной оси изменяется, свободно следуя за изменением поперечной составляющей тока статора, и, следовательно, поперечное индуктивное сопртивление генератора в переходном процессе должно полностью содержать составляющую поперечной реакции якоря.
Иными
словами, поперечное индуктивное
сопротивление генератора в переходном
процессе должно быть равно синхронному
поперечному индуктивному сопротивлению
![]() .
.
Таким
образом, с некоторыми оговорками
генератор в переходном процессе может
быть замещен в продольной оси переходным
индуктивным сопротивлением
и э.д.с.
![]() и в поперечной оси синхронным индуктивным
сопротивлением
.
и в поперечной оси синхронным индуктивным
сопротивлением
.
Это относится к любому внезапному нарушению режима работы синхронной машины, связанному не только с коммутационными явлениями в цепи генератора, но и с изменениями частоты вращения и углового сдвига ротора .
Так, например, если допустить весьма быстрое изменение угла , характеризующего относительное положение ротора генератора, работающего на шины бесконечной мощности, то при пересечении магнитного потока реакции якоря в обмотке возбуждения возникают свободные токи, компенсиру-
ющие изменение продольной составляющей потока реакции так же, как и при к.з.
Принцип постоянства потокосцепления обмотки возбуждения позволяет и в этих условиях характеризовать генератор индуктивными сопротивлениями и и э.д.с. .
 Векторная диаграмма
генератора при этом имеет вид, изображенный
на рис.7.13.
Векторная диаграмма
генератора при этом имеет вид, изображенный
на рис.7.13.
Рис.7.13. Векторная диаграмма синхронной машины,
представленной сопротивлениями и
Она аналогична векторной диаграмме явнополюсной машины с индуктивным сопротивлением в продольной оси и э.д.с. .
Согласно выражения (5.4) зависимость активной мощности машины с такими параметрами от угла имеет вид:
![]() (7.1)
(7.1)
Таким образом, характеристика мощности помимо основной гармоники
![]() имеет
и вторую гармонику
имеет
и вторую гармонику
![]() .
.
Коэффициент
-
отрицателен, поскольку
![]() ,
что обусловливает смещение максимума
характеристики активной мощности в
область углов, больших
.
,
что обусловливает смещение максимума
характеристики активной мощности в
область углов, больших
.
В
практических расчетах зачастую опускают
вторую гармонику, предполагая, что
индуктивные сопротивления в продольной
и поперечной осях одинаковы и равны
.
При этом вместо э.д.с.
и угла
в расчет вводятся некоторые фиктивные
величины э.д.с.
и угла
![]() (рис.7.14) и тогда характеристика мощности
может быть рассчитана по выражению:
(рис.7.14) и тогда характеристика мощности
может быть рассчитана по выражению:
![]() .
(7.2)
.
(7.2)
В дальнейшем, там, где это не вызовет недоразумений, используя выражение (7.2), мы не будем писать индекс “ ' “ у э.д.с. и угла, но следует помнить, что речь идет о фиктивных значениях этих величин.
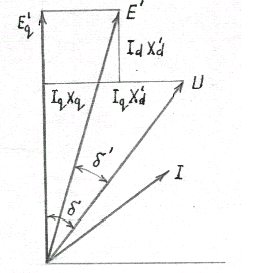 Рис.7.14.
Определение фиктивных э.д.с.
и
угла
на векторной диаграмме
Рис.7.14.
Определение фиктивных э.д.с.
и
угла
на векторной диаграмме