

Р ис.5.3. Векторная диаграмма нормального режима работы явнополюсного генератора
![]()
![]()
![]() ,
,
то активную мощность явнополюсного генератора можно представить следующим образом:
 (5.4)
(5.4)
Таким
образом , характеристика активной
мощности явнополюсного генератора,
построенная при постоянстве э.д.с.
,
кроме основной синусоидальной составляющей
![]() содержит также вторую составляющую в
виде синусоиды двойной частоты
содержит также вторую составляющую в
виде синусоиды двойной частоты
![]() ,
амплитуда которой пропорциональна
разности индуктивных сопротивлений в
продольной и поперечной осях машины и
не зависит от э.д.с. машины
(рис.5.4).
,
амплитуда которой пропорциональна
разности индуктивных сопротивлений в
продольной и поперечной осях машины и
не зависит от э.д.с. машины
(рис.5.4).
Эта
вторая гармоника мощности смещает
максимум характеристики мощности
явнополюсной машины
в сторону меньших значений угла
и критический угол
![]() ,
при котором достигается максимум
мощности, получается меньше
.
,
при котором достигается максимум
мощности, получается меньше
.
Это
обстоятельство не следует рассматривать
как уменьшение запаса устойчивости,
так как одновременно уменьшается и
начальный угол
![]() при заданном значении предаваемой
мощности
.
при заданном значении предаваемой
мощности
.
 Рис.5.4.
Угловая характеристика активной мощности
явнополюсного генератора
Рис.5.4.
Угловая характеристика активной мощности
явнополюсного генератора
Амплитуда
характеристики мощности
, наоборот, возрастает сравнительно с
характеристикой неявнополюсной машины
при тех же значениях
![]() .
Однако увеличение
значительно только тогда, когда амплитуда
основной гармоники (
.
Однако увеличение
значительно только тогда, когда амплитуда
основной гармоники (![]() )
того же порядка, что и амплитуда второй
гармоники
)
того же порядка, что и амплитуда второй
гармоники
![]() .
.
В обычных условиях, когда э.д.с. достаточна высока, амплитуда второй гармоники не превышает 10-15% амлитуды основной гармоники и ее влияние на максимум характеристики активной мощности невелико.
Поскольку учет влияния явнополюсности (то есть различия индуктивных сопротивлений в продольной и поперечной осях) при сложных схемах замещения представляет значительные трудности, нередко в расчетах статической устойчивости явнополюсные машины замещают неявнополюсными с синхронным индуктивным сопротивлением, равным продольному синхронном индуктивному сопротивлению явнополюсной машины , опуская тем самым вторую гармонику мощности.
Замещение явнополюсной машины неявнополюсной практикуется и в тех случаях, когда для уточнения расчетов желательно учесть эффект явнополюсности.
При этом у эквивалентной неявнополюсной машины вводится фиктивная э.д.с., изменяющаяся с изменением режима работы генератора таким образом, чтобы активная и реактивная мощности эквивалентного генератора получались бы такими же, как у явнополюсного генератора.
Для получения правильного значения угла синхронное индуктивное сопротивление эквивалентного неявнополюсного генератора с переменной э.д.с. принимается равным не продольному, а поперечному индуктивному сопротивлению явнополюсного генератора .
12.Характеристика мощности электропередачи с генераторами, имеющими арв.
До сих пор предполагалось, что э.д.с. генераторов при изменении их активной мощности остается неизменной.
Как можно будет видеть из дальнейшего изложения, связанное с ростом передаваемой активной мощности увеличение угла обусловливает снижение напряжения на шинах генератора.
Если возрастание нагрузки происходит достаточно медленно, то э.д.с. генератора путем регулирования тока возбуждения может быть изменена для поддержания постоянства напряжения на его шинах. Предел передаваемой активной мощности при этом резко возрастает.
Для
схемы электропередачи (рис.2.3) с
сопротивлением системы
![]() значение напряжения на шинах генератора
можно получить из векторной диаграммы
(рис.5.8), прибавляя к вектору напряжения
приемника
падение напряжения в суммарном индуктивном
сопротивлении трансформаторов и линии,
равном
значение напряжения на шинах генератора
можно получить из векторной диаграммы
(рис.5.8), прибавляя к вектору напряжения
приемника
падение напряжения в суммарном индуктивном
сопротивлении трансформаторов и линии,
равном
![]() .
.
 Прибавляя
далее к вектору
Прибавляя
далее к вектору
![]() падение напряжения в синхронном
индуктивном сопротивлении
падение напряжения в синхронном
индуктивном сопротивлении
![]() ,
находим э.д.с.
генератора в данном режиме .
,
находим э.д.с.
генератора в данном режиме .
Рис.5.8.
Изменение вектора напряжения
![]()
на
шинах генератора при увеличении угла
и
![]()
Вектор
напряжения на шинах генератора
делит вектор полного падения напряжения
![]() на два отрезка:
на два отрезка:
![]() и
и
![]() -
в отношении значений индуктивных
сопротивлений
-
в отношении значений индуктивных
сопротивлений
![]() и
.
и
.
При увеличении угла на вектор э.д.с. генератора займет новое положение, показанное на векторной диаграмме рис.5.8 штриховой линией.
Положение
вектора напряжения генератора
в новом режиме можно найти, разделив в
отношении значений индуктивных
сопротивлений
![]() и
вектор полного падения напряжения
,
соединяющий концы векторов
и
.
и
вектор полного падения напряжения
,
соединяющий концы векторов
и
.
Как следует из векторной диаграммы, вектор при увеличении угла поворачивается, следуя за вектором и, что особенно важно, при этом уменьшается. Этот вывод справедлив для напряжения любой другой промежуточной точки схемы электропередачи при увеличении по ней передаваемой мощности.
При наличии у генераторов автоматических регуляторов напряжения, контролирующих напряжение , ситуация будет другой. Регуляторы, реагируя на понижение напряжения при возрастании угла будут увеличивать ток возбуждения генераторов, а с ними э.д.с. до тех пор, пока не восстановят прежнего значения напряжения .
Таким образом, исследуя установившиеся режимы работы генераторов, имеющих автоматические регуляторы напряжения, при различных значениях угла следует исходить из постоянства . Значение же в этих условиях будет изменяться, возрастая с увеличением угла (рис.5.9).
 Если
при неизменной э.д.с.
характеристика мощности генераторов
в зависимости от угла
представляет собой синусоиду, то при
наличии регуляторов напряжения, эта
характеристика будет иметь более сложный
характер, отражая непрерывное изменение
э.д.с
генераторов в зависимости от угла
.
Если
при неизменной э.д.с.
характеристика мощности генераторов
в зависимости от угла
представляет собой синусоиду, то при
наличии регуляторов напряжения, эта
характеристика будет иметь более сложный
характер, отражая непрерывное изменение
э.д.с
генераторов в зависимости от угла
.
Рис.5.9.
Изменение вектора э.д.с. генератора
![]() при увеличении угла
при увеличении угла
и постоянстве величины модуля вектора напряжения на шинах генератора
Построив для различных значений семейство синусоид (рис.5.10) мо- жно получить характеристику активной мощности генератора (которую мы назовем внешней характеристикой) с учетом изменения э.д.с. , переходя с одной синусоиды на другую в соответствии с ростом э.д.с. .
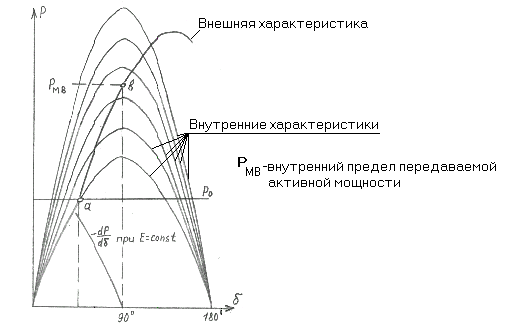 Рис.5.10.
Определение внутреннего предела активной
мощности
Рис.5.10.
Определение внутреннего предела активной
мощности
Если увеличение активной мощности и угла происходит достаточно медленно, то такая же характеристика может быть получена и при ручном регулировании напряжения.
Заметим,
что внешняя характеристика имеет
возрастающий характер даже в области
углов
![]() ,
что объясняется увеличением э.д.с.
,
которое преобладает над уменьшением
,
что объясняется увеличением э.д.с.
,
которое преобладает над уменьшением
![]() в выражении мощности при углах, несколько
в выражении мощности при углах, несколько
![]() .
.
Максимум
внешней характеристики достигается
при
![]() ,
где
,
где
![]() -
угол сдвига вектора напряжения
на
шинах генератора относительно вектора
напряжения
на шинах приемной системы.
-
угол сдвига вектора напряжения
на
шинах генератора относительно вектора
напряжения
на шинах приемной системы.
На
практике неустойчивость системы
возникает ранее, и при регуляторах
напряжения с зоной нечувствительности,
а тем более при ручном регулировании,
критическим с точки зрения устойчивости
следует признать режим не при
![]() ,
а при
,
а при
![]() .
.
В
области углов
![]() несовершенство регулирования не приводит
к неустойчивости системы, так как
синусоидальные характеристики при
постоянстве э.д.с.
имеют в этой области значений углов
возрастающий характер. При углах
режим переходит на падающие ветви
синусоидальных характеристик активной
мощности – система становится внутренне
неустойчивой и удержать машины в
синхронизме здесь можно лишь при
исключительно точном регулировании.
несовершенство регулирования не приводит
к неустойчивости системы, так как
синусоидальные характеристики при
постоянстве э.д.с.
имеют в этой области значений углов
возрастающий характер. При углах
режим переходит на падающие ветви
синусоидальных характеристик активной
мощности – система становится внутренне
неустойчивой и удержать машины в
синхронизме здесь можно лишь при
исключительно точном регулировании.
Таким образом, при ручном регулировании возможность устойчивой работы в области практически исключена. Затруднена она и при автоматическом регулировании, если регуляторы имеют зону нечувствительности(при изменении напряжения в пределах зоны нечуствительности регуляторы не работают и э.д.с. генераторов остается постоянной).
В общем случае критерием статической устойчивости является знак выражения , называемого синхронизирующей мощностью.
Таким образом, рассматривая внешнюю характеристику мощности как совокупность возможных установившихся режимов работы при ручном регулировании или при автоматическом регулировании с зоной нечувствительности, устойчивость этих режимов в каждой точке внешней характеристики следует проверять по знаку синхронизирующей мощности при постоянстве э.д.с. генераторов, определяемой по касательной к соответствующей внутренней характеристике мощности, как показано на рис.5.10.
Предельное
значение активной мощности в этих
условиях, так называемый внутренний
предел мощности
![]() ,
достигается в точке
,
достигается в точке
![]() на
внешней характеристике при
на
внешней характеристике при
![]() (или
при
(или
при
![]() при наличии в системе активных
сопротивлений).
при наличии в системе активных
сопротивлений).
Как было сказано раньше, система не должна работать на пределе устойчивости, так как на случай непредвиденных изменений режима необходим определенный запас устойчивости.
Несовершенство регулирования напряжения вручную заставляет при определении запаса устойчивости при таком регулировании ориентироваться на постоянство э.д.с. генераторов.
Заметим, что для каждой точки внешней характеристики активной мощности существует свой запас устойчивости, определяемый по внутренней характеристике, проходящей через данную точку(рис.5.11). По мере увеличения значения передаваемой мощности запас уменьшается и становится равным нулю при достижении внутреннего предела мощности.
При
наличии автоматических регуляторах
напряжения могут быть допущены меньшие
запасы по внутренней характеристике,
а следовательно, и
![]() значения
передаваемой мощности
,
так как при более или менее значительных
изменениях режима можно не считаться
с наличием зоны нечувствительности
регуляторов.
значения
передаваемой мощности
,
так как при более или менее значительных
изменениях режима можно не считаться
с наличием зоны нечувствительности
регуляторов.
 Рис.5.11.
Пример изменения запаса статической
устойчивости,
Рис.5.11.
Пример изменения запаса статической
устойчивости,
определяемого по внутренней характеристике
Таким образом, автоматические регуляторы напряжения обеспечивают дополнительный запас устойчивости вплоть до внутреннего предела мощности.
Регуляторы без зоны нечувствительности принципиально позволяют работать и за внутренним пределом мощности, еще более расширяя область устойчивой работы генераторов.
Нельзя однако не отметить, что положительный эффект автоматических регуляторов напряжения может быть ограничен харавктеристиками возбудителей, так как при срабатывании регулятора напряжение возбудителя не може расти беспредельно.
Напряжение возбудителя ограничено некоторым максимальным возможным значением- так называемым потолком возбуждения.
Очевидно,
что потолку возбуждения соответствует
и некоторое предельное значение э.д.с.
генератора
![]() .
.
Если
потолок возбуждения будет достигнут
при угле
,
то при дальнейшем росте
процесс
будет протекать уже при постоянстве
э.д.с.![]() и предел мощности получается равным
амплитуде синусоиды, построенной при
.
и предел мощности получается равным
амплитуде синусоиды, построенной при
.