


1.Введение
2.
Введение
Одним из подходов, позволяющих уменьшить потери на нагрев силовых элементов схем, является применение переключательных режимов работы. При таких режимах силовой элемент либо открыт, тогда на нем практически нулевое падение напряжения, либо закрыт, тогда через него идет нулевой ток. Рассеиваемая мощность равна произведению силы тока на напряжение. В таком режиме удается добиться коэффициента полезного действия более 80%.
Чтобы получить на выходе сигнал нужной формы, силовой ключ открывается на определенное время, пропорциональное нужному выходному напряжению. Это и есть широтно-импульсная модуляция (ШИМ, PWM). Далее такой сигнал, состоящий из импульсов разной ширины, поступает в фильтр, состоящий из дросселя и конденсатора. На выходе фильтра получается практически идеальный сигнал нужной формы.
Применение широтно-импульсной модуляции (ШИМ)
Широтно-импульсная модуляция применяется обычно в импульсных источниках питания, стабилизаторах и преобразователях напряжения. Однако это не единственное применение. Мощные усилители звуковой частоты, особенно носимые, нередко строятся тоже на основе ШИМ, так как такой подход снижает потребление энергии, уменьшает нагрев и габариты устройства. Недостатком является не очень хорошее качество выходного сигнала. Но если качество не критично, то выбор в сторону ШИМ очевиден.
Формировать ШИМ сигнал довольно сложно. Однако промышленность сейчас выпускает отличные специализированные микросхемы - ШИМ контроллеры. Они недороги и полностью решают проблему формирования широтно-импульсного сигнала. Разберемся в устройстве таких контроллеров и их применении.
Структурная схема микросхемы TL494
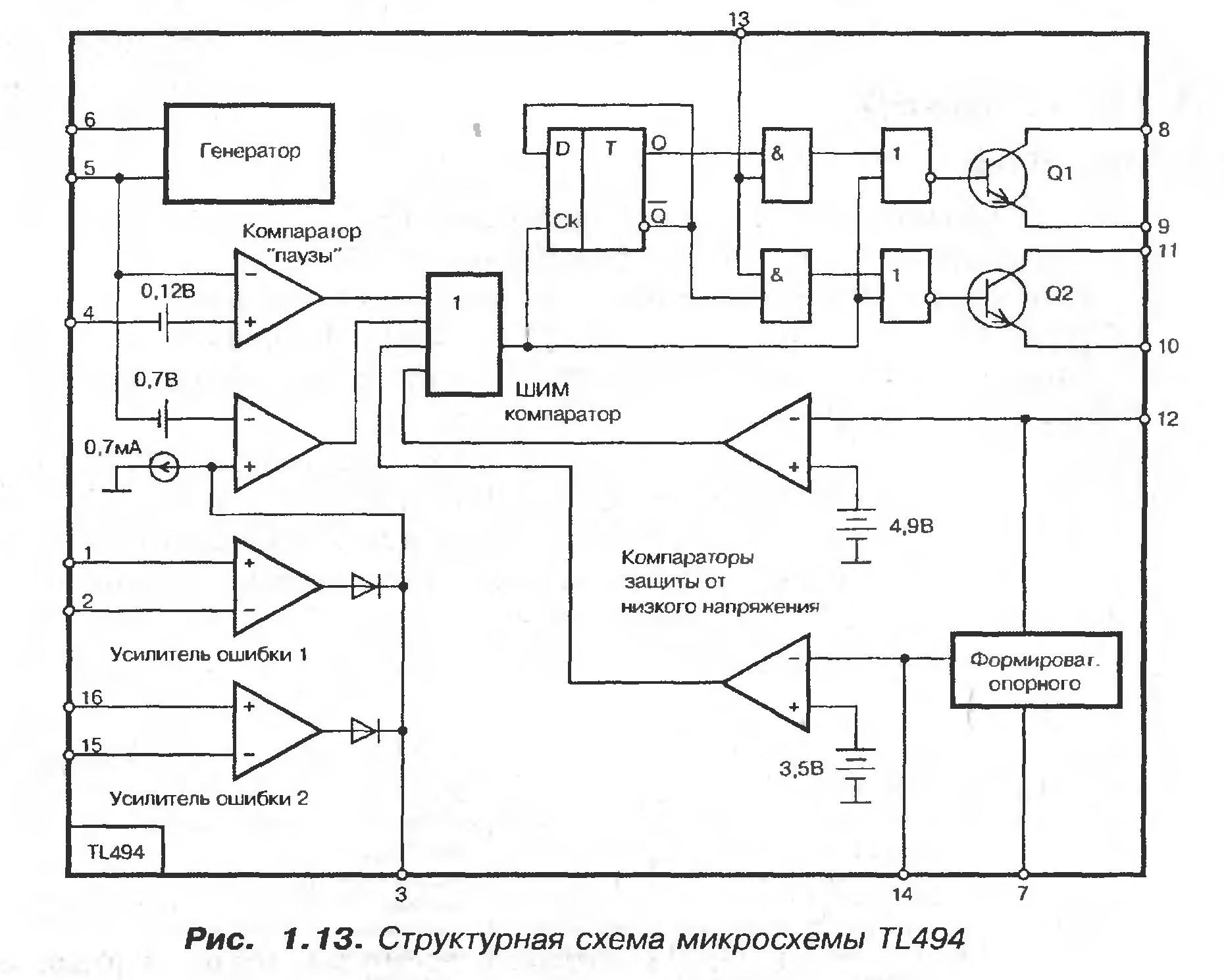
ШИМ (PWM) контроллер
МС TL494CN включает в себя усилитель ошибки, встроенный регулируемый генератор, компаратор регулировки мертвого времени, триггер управления, прецизионный ИОН на 5V и схему управления выходным каскадом. Усилитель ошибки выдает синфазное напряжение в диапазоне от –0,3…(Vcc-2) В. Компаратор регулировки мертвого времени имеет постоянное смещение, которое ограничивает минимальную длительность мертвого времени величиной порядка 5%.
Допускается синхронизация встроенного генератора, при помощи подключения вывода R к выходу опорного напряжения и подачи входного пилообразного напряжения на вывод С, что используется при синхронной работе нескольких схем ИВП.
Независимые выходные формирователи на транзисторах обеспечивают возможность работы выходного каскада по схеме с общим эмиттером либо по схеме эмиттерного повторителя. Выходной каскад микросхем TL494CN работает в однотактном или двухтактном режиме с возможностью выбора режима с помощью специального входа.
Встроенная схема контролирует каждый выход и запрещает выдачу сдвоенного импульса в двухтактном режиме.
Генератор пилообразного напряжения;
частота ГПН определяется номиналами
внешних компонентов R и
С подключенных к CT и RT
выводам. Частота генератора определяется
по формуле:
![]() .
.

Анализ элементной базы
Характеристика элементной базы
Наименование ЭРИ |
Количество, шт. |
Конструктивные параметры |
|
|||||||
Масса, г
|
Количество выводов |
Диаметр вывода, мм |
Штыревые или планарные |
Установочная площадь, мм2 |
Надежность |
Диапазон температур, °С |
||||
Резистор углеродный СF-100 (C1-4)
|
10 |
0,15 |
2 |
0,60 |
планарные |
28,8 |
Высокая |
- 55…+125 |
||
Конденсатор Электролитический (поляризованный) ECAP (K50-35) |
1 |
0,11 |
2 |
0,50 |
штыревые |
35 |
Высокая |
- 40…+85 |
||
Шим-контроллер TL494CN (КР1114ЕУ4)
|
1 |
1,50 |
16 |
0,50 |
штыревые |
161,25 |
Высокая |
- 10…+70 |
||
Конденсатор постоянной емкости B1010-2R5155-R |
3
|
0,19
|
2
|
0,60
|
штыревые
|
155,4
|
Высокая
|
-25…+70
|
||
Резистор
Резисторы с углеродным проводящим слоем предназначены для работы в цепях постоянного, переменного и импульсного тока. Углеродистые резисторы отличаются широким диапазоном температур, высокой надёжностью, стабильностью параметров.
Обозначение резисторов на схемах
 а)
обозначение, принятое в России и в
Европе
б)
принятое в США
В
России условные графические обозначения
резисторов на схемах должны соответствовать
ГОСТ 2.728-74.
а)
обозначение, принятое в России и в
Европе
б)
принятое в США
В
России условные графические обозначения
резисторов на схемах должны соответствовать
ГОСТ 2.728-74.

Резистор углеродистый
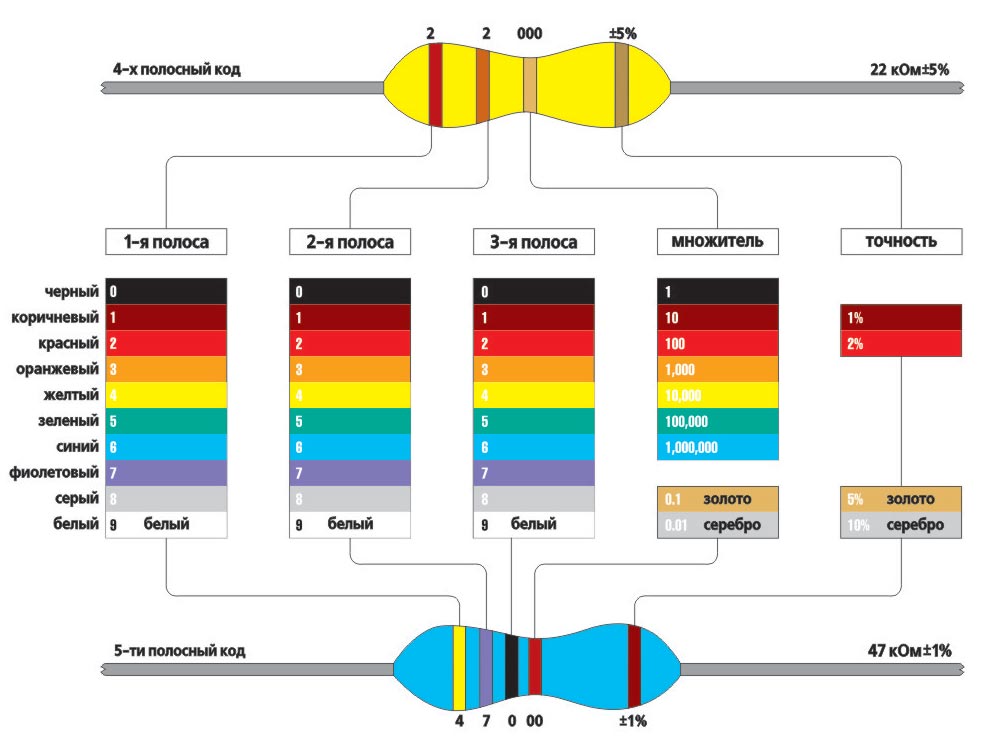
Маркировка резисторов
Технические параметры
Тип
с1-4
Номинальное сопротивление
1
Единица измерения
ом
Точность,%
5
Номинальная мощность, Вт
1
Максимальное рабочее напряжение, В
500
Рабочая температура, С
-55…155
Монтаж
в отв.
Длина корпуса L, мм
11
Ширина (диаметр) корпуса W(D), мм
4.5
Конденсатор
В России условные графические обозначения конденсаторов на схемах должны соответствовать ГОСТ 2.728-74 либо международному стандарту IEEE 315—1975.
Обозначение по ГОСТ 2.728-74 |
Описание |
|
Конденсатор постоянной ёмкости |
|
Поляризованный (полярный) конденсатор |
|
Подстроечный конденсатор переменной ёмкости |
|
Варикап |
Обозначение по ГОСТ
Конденсаторы постоянной емкости – устройства, предназначенные для накопления заряда и энергии электричества, получаемого при включении его (устройства) в цепь. Конденсаторы постоянной ёмкости (постоянные конденсаторы) подразделяются на высокочастотные и низкочастотные. Постоянные конденсаторы не могут изменять свою ёмкость в процессе работы, то есть их ёмкость является постоянной (точнее, она может колебаться в небольших пределах в зависимости от температуры, но это в пределах допуска).

Конденсатор постоянной емкости
Технические параметры
Capacitance
1F
Capacitance Tolerance
+80%, -20%
Voltage Rating
2.5V
Capacitor Case Style
(Not Applicable)
Capacitor Terminals
Radial Leaded
Lead Spacing
20mm
ESR
0.4ohm
No. of Pins
2
Конденсатор электролитический (полярный)
Огромное отношение ёмкости к объёму, недорогие, полярные. В основном применяются как сглаживающие и питающие конденсаторы в источниках питания. Наработка на отказ конденсатора с максимально допустимой рабочей температурой 105 °C при расчёте составляет до 50000 часов при температуре 75 °C

Конденсатор полярный
Технические параметры
Тип
к50-35 мини.
Рабочее напряжение, В
50
Номинальная емкость, мкФ
0.47
Допуск номинальной емкости,%
20
Рабочая температура, С
-40…85
Тангенс угла потерь,%
0.1
Ток утечки макс., мкА
3
Выводы/корпус
радиал. пров.
Диаметр корпуса D, мм
4
Длина корпуса L, мм
7
Шим-контроллер
ШИМ (широтно-импульсная модуляция), англ. PWM - pulse width modulation. ШИМ - это цифровой сигнал, с помощью которого можно задать и управлять в широких пределах уровнем аналогового сигнала с помощью ключей.
Это особенно важно в мощных регуляторах с высоким КПД, так как на ключах рассеивается минимальная мощность только в момент переключения.
Генератор синхронизирующих импульсов задает период (Т) и частоту следования импульсов ШИМ (F=1/Т). Формирователь пилообразного сигнала генерирует линейно изменяющийся сигнал. Устройство сравнения фиксирует момент времени, когда линейно изменяющийся сигнал достигнет уровня управляющего сигнала Uo. На выходе формируется импульсный сигнал от начала временной развертки до момента равенства. В ШИМ – модуляторах управляющий сигнал аналоговый, в ШИМ – контроллерах – цифровой. Это определяет конкретную схемотехнику (аналоговую или цифровую) генератора пилообразного сигнала и схемы сравнения.
От уровня управляющего сигнала Uo зависит длительность цифрового импульса ШИМ – Т 1 и, соответственно, коэффициент ШИМ G. Критерием качества ШИМ – преобразователя является коэффициент нелинейности % зависимости G от управляющего сигнала U.

Где
![]() и
и
![]() - крутизна преобразования в начале и в
конце характеристики.
- крутизна преобразования в начале и в
конце характеристики.
Шим-контроллер TL494CN
Типичная микросхема контроллера широтно-импульсной модуляции имеет следующие выводы.
Общий вывод (GND). Тут говорить нечего. Это ножка, которая подключается к общему проводу схемы питания контролера.
Вывод питания (VC). Через этот вывод к микросхеме подводится питание. Не путайте его с выводом VCC.
Вывод контроля питания (VCC). Обычно микросхема контроллера ШИМ управляет силовыми транзисторами (полевыми или биполярными). Если напряжение на ее выходе уменьшится, то транзисторы начнут открываться не полностью, быстро нагреются и выйдут из строя. Чтобы это исключить, нужно следить, что напряжение питания микросхемы выше определенного значения. Этот вывод нужен именно для этого. Если напряжение на этом выводе падает ниже заданного для данного контроллера, то контроллер выключается. Обычно эту ножку соединяют с VC.
Выходное управляющее напряжение (OUT). Есть микросхемы с двумя выводами для управления двухплечевыми (двухтактными) выходными каскадами (пушпульный, полумост, мост, двухтактные обратноходовые преобразователи), а есть с одним выводом для управления одноплечевыми (однотактными) (прямоходовый, обратноходовый, повышающий, понижающий, инвертирующий). Кроме того выходной каскад может быть однотактным или двухтактным. Тут возникает некоторая путаница. Не следует путать двухтактный выходной каскад контроллера и контроллер управления двухтактным каскадом. Двухтактный выходной каскад предназначен для управления полевым транзистором. Полевой транзистор управляется напряжением. Чтобы его быстро закрыть, нужно быстро разрядить емкости затвор - исток и затвор - сток. Для этого используется двухтактный выходной каскад контроллера, который обеспечивает замыкание выхода на общий провод, когда нужно закрыть полевой транзистор. Для управления биполярным транзистором двухтактный каскад не нужен, так как управление осуществляется током. Чтобы закрыть биполярный транзистор, достаточно просто прекратить ток через базу. Замыкать базу на общий провод необязательно.
Опорное напряжение (VREF). Для удобства контроллер обычно дополнен функцией формирования стабильно опорного напряжения. Производители обычно рекомендуют соединять этот вывод с общим проводом конденсатором 1 мкФ. Это повышает качество и стабильность опорного напряжения.
Ограничение тока (ILIM). Если напряжение на этом выводе превышает определенное (обычно 1 Вольт), то контроллер закрывает силовые ключи. Если напряжение превышает другой, больший порог (обычно 1.5 Вольта), то контроллер сбрасывает напряжение на ножке мягкого старта. После этого импульсы на выходе прекращаются, и, если у Вас собрана цепь мягкого запуска, то начинается процесс мягкого запуска (о нем ниже). У некоторых контроллеров есть специальная ножка (ILIMREF), напряжение на которой задает напряжение срабатывания ограничения тока. Тогда напряжение на ножке ILIM сравнивается с напряжением на ножке ILIMREF, а не с фиксированным напряжением. Закрывание силовых ключей происходит при превышении напряжения на ILIM над напряжением на ILIMREF, а сброс мягкого старта по-прежнему при превышении некоторого фиксированного напряжения.
Мягкий старт (SS). Напряжение на этой ножке ограничивает максимально возможную ширину импульсов. На эту ножку контроллер подает ток фиксированной силы. Если между этой ножкой и общим проводом установить конденсатор, то он будет постепенно заряжаться, что приведет к постепенному увеличению ширины импульсов от нуля до расчетного значения. Это обеспечит постепенное, а не мгновенное нарастание силы тока и напряжения в системе. Это и есть мягкий старт. Если искусственно ограничить напряжение на этой ножке, например, путем подключения делителя напряжения и диода, то можно вообще исключить превышение ширины импульсов некоторого заданного значения. Это бывает нужно для повышения устойчивости работы конструкции.
Резистор и конденсатор, задающие частоту работы контроллера (RT, CT). Контроллер работает на определенной частоте. Импульсы следуют с этой частотой. Контроллер меняет длительность импульсов, но не частоту. Это значит, что чем короче импульс, тем длиннее пауза и наоборот, а частота следования остается постоянной. Конденсатор, подключенный между CT и общим проводом, и резистор, подключенный между RT и общим проводом, задают частоту работы контроллера.
Импульсы синхронизации (CLOCK). Иногда необходимо заставить работать несколько контроллеров синхронно. Тогда к одному контроллеру (ведущему) подключают частотозадающие конденсатор и резистор. На ножке CLOCK ведущего контроллера появляются короткие импульсы напряжения. Эти импульсы подаются на ножки CLOCK других контроллеров (ведомых). Ножки RT ведомых контроллеров соединяются с VREF этих контроллеров, а ножки CT - с общим проводом.
Напряжение для сравнения (RAMP). На эту ножку нужно подать пилообразное напряжение. В момент возникновения импульса синхронизации на выходе контроллера появляется открывающее управляющее напряжение. Далее, как только напряжение на RAMP превышает напряжение на выходе усилителя ошибки на определенную величину, на выходе возникает закрывающее напряжение. Так что импульс длится от момента синхронизационного импульса до момента превышения напряжения на RAMP над напряжением выхода усилителя ошибки. Этим и достигается ШИМ. В классической схеме на RAMP подается напряжение с CT. Там как раз отличная пила. Есть и другие варианты включения.
Инвертирующий и неинвертирующий входы усилителя ошибки (INV, NONINV). На входе ШИМ контроллера стоит обычный операционный усилитель. Это его инвертирующий и неинвертирующий входы. Увеличение напряжения на неинвертирующем входе приводит к увеличению длительности импульсов, уменьшение - к уменьшению. С инвертирующим входом все наоборот. Обычно неинвертирующий вход подключают к ножке опорного напряжения, а на инвертирующий вывод подают выходное напряжение через делитель и цепь обратной связи.
Выход усилителя ошибки (EAOUT). Казалось бы, нет ничего проще. Подаем на NONINV опорное напряжение, но INV - часть выходного напряжения, такую, чтобы она равнялась опорному при нужном выходном. Но так ничего не получится в связи с тем, что преобразователь напряжения имеет довольно медленную реакцию на управление. Пока выходное напряжение увеличится или уменьшится, проходит довольно большое время. Так что если подать выходное напряжение через делитель непосредственно на INV, то полученная отрицательная обратная связь на некоторой частоте из-за задержки превратится в положительную. Устройство возбудится, на выходе появится вместо требуемого сигнал сложной формы. Из-за возбуждения устройство, скорее всего, выйдет из строя. Чтобы победить возбуждение, используется выход EOUT. С него сигнал через частотно зависимые цепи подается на INV, достигается частотная коррекция усилителя ошибки.