

Описание принципа работы программной части.
На рис. 2.1 схематически изображена взаимосвязь исполнительной части стенда, контроллера и ПК.
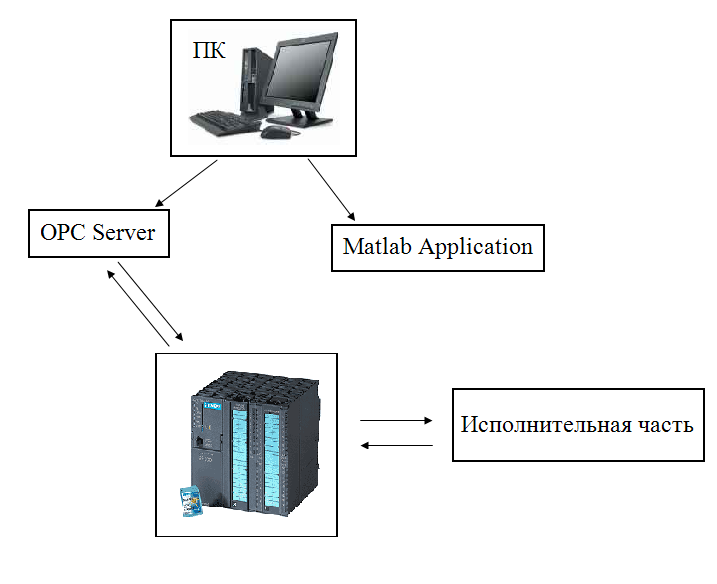
Рис.2.1 Взаимосвязь всех частей стенда
На персональном компьютере, на котором был установлен ОРС SERVER, программное обеспечение, осуществляющее связь контроллера с программным приложением, которое так же установлено на ПК. Программное обеспечение разработано в среде MATLAB, и включает в себя функции по осуществлению подключения к ОРС Server. Помимо этого программное обеспечение включает в себя алгоритм захвата изображения и его дальнейший анализ. В качестве контроллера взят Siemens S7-300 с дополнительным модулем вх/вых и модулем Ethernet.
ОРС Server.
OPC Server (OLE for Process Control) – семейство программных технологий, предоставляющих единый интерфейс для управления объектами автоматизации и технологическими процессами.
Стандарт OPC разрабатывался с целью сократить затраты на создание и сопровождение приложений промышленной автоматизации. В начале 90-х у разработчиков промышленного ПО возникла потребность в универсальном инструменте обмена данными с устройствами разных производителей или по разным протоколам обмена данными.
Суть OPC проста — предоставить разработчикам промышленных программ универсальный фиксированный интерфейс (то есть набор функций) обмена данными с любыми устройствами. В то же время разработчики устройств предоставляют программу, реализующую этот интерфейс (набор функций).
Исходя из области применения OPC серверов в АСУ предприятия различают несколько уровней управления:
нижний уровень — полевые шины (fieldbus) и отдельные контроллеры;
средний уровень — цеховые сети;
уровень АСУ ТП — уровень работы систем типа SCADA;
уровень АСУП — уровень приложений управления ресурсами.
Каждый из этих уровней может обслуживаться OPC сервером, поставляя данные OPC клиенту на более высоком уровне или даже «соседу».
В данной дипломной работе была использована программа KEPServerEX V5.0
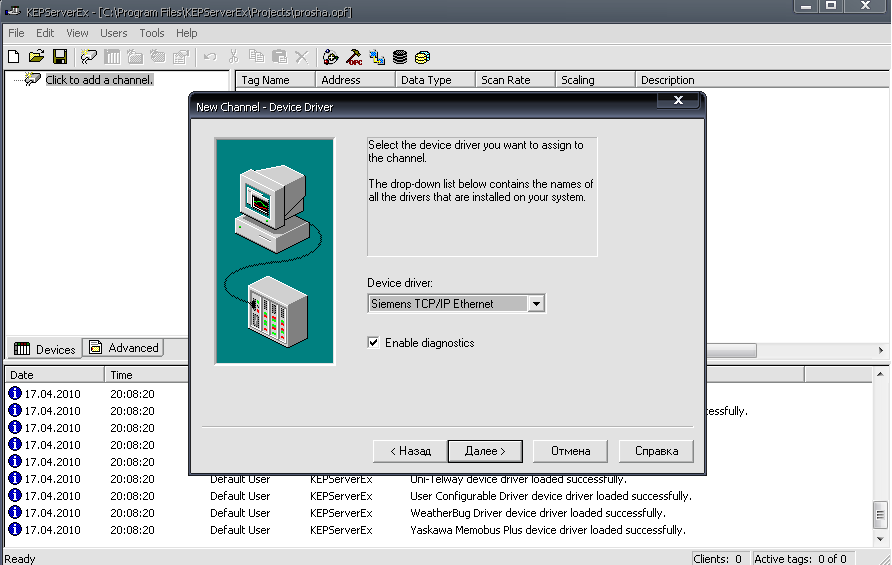
Рис.3.1 Выбор интерфейсного драйвера
KepserverEX – это ОРС сервер, который обеспечивает связь с более чем сотней разных контроллеров, а также других технологических устройств. Он может использоваться любым ОРС – клиентом, который поддерживает технологию ОРС: системой визуализации и контроля , системами MES, ERP, и любой другой системой этого класса. Используя универсальность технологии ОРС, KepserverEX максимально расширяет горизонты применения ОРС – серверов и позволяет создавать сложные системы управления технологической системой через один интерфейс, вне зависимости от ее сложности.
Для того чтобы настроить соединение первым делом необходимо в окне программы KepserverEX создать новую рабочую область, а затем и канал соединения. Далее был выбран интерфейсный драйвер, через который осуществляется доступ к контроллеру Siemens (рис 3.1).
Это необходимо для того, чтобы была возможность обмена данными с контроллером. Был выбран драйвер Siemens TCP/IP Ethernet. После выбора видеоадаптера был осуществлен выбор и настройка центрального модуля контроллера. В окне Tag Properties задаются имя тега и адрес сигнала, который будет связан с тегом. Используется адресация, присущая типу выбранного контроллера.
После того как было задано необходимое для работы число тегов, и для каждого из них определена верная адресация, другие программные приложения получили возможность работать через ОРС сервер с контроллером, запрашивать значения сигналов и данных контроллера и записывать значения сигналов и данных в контроллер.
Если значения сигнала определено ОРС сервером как Unknown, это означает, что ОРС серверу не удалось произвести подключение к контроллеру или адресация, используемая в тегах, не определена в контроллере.