

§ 3.6. Оценивание результатов и погрешностей совокупных и совместных измерений с многократными наблюдениями
В § 1.2 отмечалось, что при совокупных и совместных измерениях искомые величины находят из решения системы уравнений (1.7), которая связывает их с величинами, непосредственно измеряемыми. При этом измерения осуществляются так, что получаемое число уравнений превышает число искомых переменных. Для этого проводят многократные наблюдения одних и тех же физических величин в одинаковых или различных условиях (в зависимости от конкретной задачи). Результаты наблюдений для всех измеряемых в каждом эксперименте величин могут быть обработаны методами, изложенными в § 3.4, 3.5, а затем их результаты могут быть сгруппированы в систему уравнений, из решения которой могут быть найдены m физических величин, определяемых совокупными или совместными измерениями. Оценка значений этих m величин и их погрешностей при этом можно найти так же, как и для косвенных измерений.
В настоящее время для обработки экспериментальных данных при выполнении совместных и совокупных измерений в большинстве случаев применяют метод Лежандра, называемый методом наименьших квадратов.
Сущность этого метода состоит в следующем. Если в систему уравнений (1.7), записанную для краткости в виде
Fi(X1,X2,...,Xn, Y1,Y2,…,Ym) = 0 (i=1,2,..., n), (3.28)
подставить значения величин Х1, Х2, ..., Хn, полученных как результаты наблюдений, то систему уравнений (3.28) можно преобразовать следующим образом:
Fi(Y1 Y2,..., Yj,..., Ym) = 0 (i=1,2..., n). (3.29)
Эта система содержит
только искомые физические величины и
постоянные коэффициенты. Число n
равно общему числу наблюдений измеряемых
величин Хі
(в
том числе
результаты повторных наблюдений
одной и той же величины). Из-за ограниченной
точности измерений величин Хі
при числе
наблюдений n, существенно большем числа
неизвестных m, не представляется возможным
найти такие значения неизвестных Yj,
при которых выполнялись бы все уравнения
полученной системы. Поэтому задача
сводится к нахождению для искомых
величин YJ
их оценок
![]() представляющих собой наилучшие
приближения к истинным значениям.
Уравнения (3.29) в отличие от обычных
математических уравнений принято
называть условными,
так как подстановка в них найденных
каким-либо путем значений оценок
не обращает уравнение в нуль:
представляющих собой наилучшие
приближения к истинным значениям.
Уравнения (3.29) в отличие от обычных
математических уравнений принято
называть условными,
так как подстановка в них найденных
каким-либо путем значений оценок
не обращает уравнение в нуль:
Fi
(![]()
![]()
![]() )
)
![]() 0
(i = 1,2,..., n).
(3.30)
0
(i = 1,2,..., n).
(3.30)
Чтобы эти уравнения превратились в тождества, их следует записать в виде
Fi ( ) + υi = 0 (i = 1,2,...,n) . (3.31)
Величины υi принято называть невязками, или остаточными, погрешностями уравнений.
Согласно методу наименьших квадратов, наилучшие оценки величин могут быть найдены в том случае, если функция Ω, представляющая собой сумму квадратов остаточных погрешностей условных уравнений, будет минимальна:
Ω =
![]() =
min.
(3.32)
=
min.
(3.32)
Суть метода наименьших квадратов может быть уяснена при рассмотрении определения параметров а и b линейной зависимости ξ = aφ+b. Пусть в результате экспериментальных исследований найдены пары значений ξi и φi (рис. 3.3).
В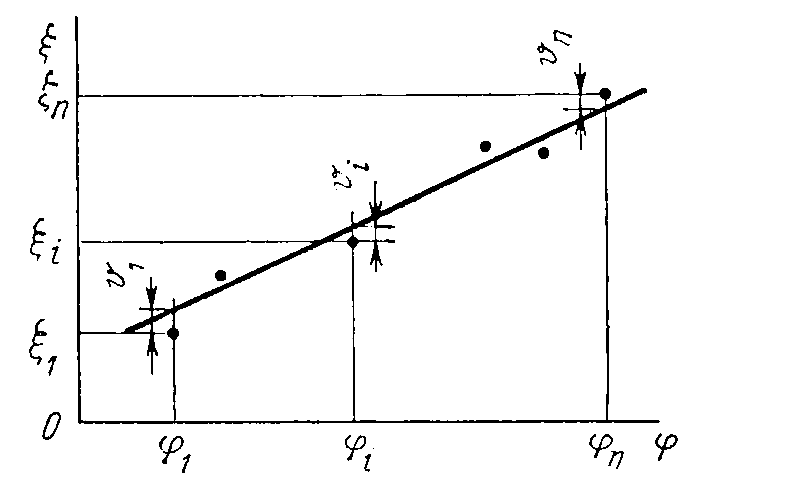 соответствии с методом наименьших
квадратов для прямой, наилучшим
образом проходящей относительно всех
n точек, полученных в результате
экспериментальных исследований значения,
а и b
должны быть выбраны такими, чтобы
функция Ω =
была
минимальна.
соответствии с методом наименьших
квадратов для прямой, наилучшим
образом проходящей относительно всех
n точек, полученных в результате
экспериментальных исследований значения,
а и b
должны быть выбраны такими, чтобы
функция Ω =
была
минимальна.
Рис. 3.3. График линейной зависимости, найденный методом наименьших квадратов
Рассмотрим теперь последовательность обработки экспериментальных данных совокупных или совместных измерений для наиболее важного случая, когда в систему (1.7) входят только линейные независимые уравнения:
X 1
=
k11
Y1
+ k12
Y2
+
… + k1m
Ym
,
1
=
k11
Y1
+ k12
Y2
+
… + k1m
Ym
,
X2 = k21 Y1 + k22 Y2 + … + k2m Ym ,
…………………………………… (3.33)
Xn = kn1 Y1 + kn2 Y2 + … + knm Ym ,
где Xi (i=1, 2, ..., n) — результаты наблюдений измеряемых физических величин; kij — известные коэффициенты; Yj (j==1, 2, ..., m)— искомые физические величины. Результаты наблюдений величины Xi — исправлены, равнорассеяны, некоррелированы и подчиняются нормальному закону распределения. Систему (3.33) можно записать в виде
Xi
=
![]() ,
(i = 1,2,..., n).
(3.34)
,
(i = 1,2,..., n).
(3.34)
Если коэффициенты kij в уравнениях (3.33) определены с такой малой погрешностью, что по сравнению с погрешностями измерений величин Xi ими можно пренебречь, то уравнение (3.33) считают точным.
Так как результаты наблюдений Xi содержат погрешность, то по аналогии с (3.31) для системы (3.34) запишем:
Xi=![]() ,
(i=1,2,...,m).
(3.35)
,
(i=1,2,...,m).
(3.35)
Для каждой остаточной погрешности
υi
= Xi
-
![]() .
(3.36)
.
(3.36)
Тогда для суммы квадратов остаточных погрешностей имеем
Ω
=
=
![]() (
Xi
-
)2
= min.
(3.37)
(
Xi
-
)2
= min.
(3.37)
Для определения , удовлетворяющих условию (3.37), находят все честные производные функции Ω по Yj, приравнивают их к нулю и получают тем самым новую систему из m уравнений:
![]() = -2
= -2
![]() (
Xi
-
)
kij
= 0 (j=1,2,...,m),
(3.38)
(
Xi
-
)
kij
= 0 (j=1,2,...,m),
(3.38)
или
![]() (
Xi
-
)
kij
= 0 (j=1,2,...,m).
(3.39)
(
Xi
-
)
kij
= 0 (j=1,2,...,m).
(3.39)
Эта система является линейной относительно искомых величин . Ее называют системой нормальных уравнений. Число этих уравнений всегда равно числу неизвестных величин Yj, Для упрощения написания системы нормальных уравнений пользуются обозначениями Гаусса для сумм:
![]()
 =
[kj
kj],
=
[kj
kj],
kij kil = [kj kl] (l=1,2,...,m), (3.40)
![]() Xi
= [kjX].
Xi
= [kjX].
Для рассматриваемого случая система нормальных уравнений имеет вид:
[
k1k1]![]() +
[k1k2]
+
[k1k2]
![]() +
… + [k1km]
+
… + [k1km]
![]() =
[k1X],
=
[k1X],
[k2k1] + [k2k2] + … + [k2km] = [k2X],
……………………………………………. (3.41)
[kmk1] + [kmk2] + … + [kmkm] = [kmX],
Решение системы (3.41) находят с помощью определителей для каждой из искомых величии:
![]() =
Dj/D,
(3.42)
=
Dj/D,
(3.42)
г де
де
[k1k1]…[k1kj]…[k1km]
D = ···································
[kmk1]…[kmkj]…[kmkm]
[k1k1]…[k1X]…[k1km]
Dj = ···································
[kmk1]…[kmX]…[kmkm]
Определитель Dj получен заменой в определителе D j-го столбца столбцом свободных членов (3.41).
Получение оценок искомых величин связано с большим объемом вычислений. Причем объем вычислений быстро увеличивается с увеличением числа условных уравнений. Последнее необходимо для увеличения точности получаемых оценок. В настоящее время обработка результатов совокупных и совместных измерений осуществляется с помощью электронных цифровых вычислительных машин, что позволяет использовать для получения оценок несколько десятков или даже сотен условных уравнений.
Оценку среднеквадратического отклонения результата измерения величины Yj определяют по формуле
![]() ,
(3.43)
,
(3.43)
где Djj — алгебраическое дополнение определителя D, получаемое путем удаления из него j-и строки и j-го столбца; S2 -оценка дисперсии условных уравнений.
Для определения S2 используют формулу
![]() S2
=
S2
=
![]() (
Xi
-
)2.
(3.44)
(
Xi
-
)2.
(3.44)
Доверительные интервалы для истинных значений всех измеряемых величин получают на основе распределения Стьюдента при числе степеней свободы, равном n—m.
Если при совокупных или совместных измерениях условные уравнения нелинейны, то применяют их линеаризацию [9, 10].