

Система параллельного централизованного арбитража для статических приоритетов
Логика работы (логика сигналов предоставления шины)
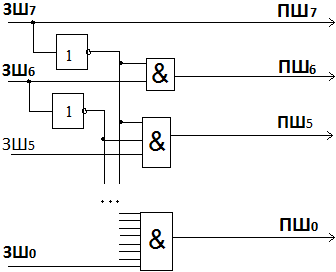
ПШ7 ЗШ7 - имеет самый высокий приоритет
ПШ6 ![]()
ПШ5 ![]()
…
ПШ0 ![]()
Приоритеты фиксированные. Устройство со статическим приоритетом выполняется в виде отдельных микросхем. Для увеличения числа входов используется каскадирование. Оно увеличивает время арбитража.
Схема централизованного параллельного арбитража может строиться с динамической сменой приоритета. Мб исполнены различные варианты динамической смены приоритетов. Это возможно благодаря прямым связям (они независимы), но они становятся причиной повышения стоимости реализации. Особенно при необходимости подключения большого количества устройств (или дополнительных) – их число ограничено.
Центральный последовательный арбитраж
Предполагает соединение ведущих устройств в цепочку – цепочный или гирляндный арбитраж.
Различают 3 основных типа схем цепочного арбитража:
С цепочкой для сигнала ПШ
С цепочкой для ЗШ
С цепочкой для дополнительного сигнала разрешения шины РШ
Наиболее часто используется схема цепочки для сигнала ПШ.
Уровни приоритета ведущих устройств в цепочке понижаются слева на право.
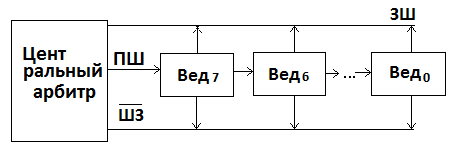
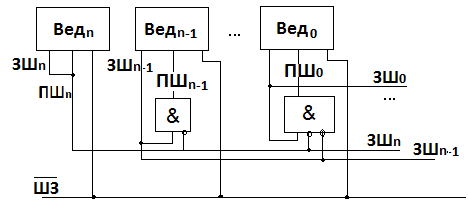
Запросы от ведущих устройств объединяются на линии ЗШ по схеме «монтажное ИЛИ»:
Когда один или несколько ведущих запрашивают шину, они транслируются на вход центрального арбитра по 1 линии. Получив сигнал ЗШ, арбитр анализирует состояние сигнала . Если шина свободна, арбитр формирует сигнал ПШ. Этот сигнал последовательно переходит по цепочке от одного ведущего к другому. Если устройство не запрашивало шину, то оно просто посылает сигнал дальше по цепочке.
При таком движении ПШ достигает ведущего, запросившего шину. В этом случае он блокирует дальнейшее прохождение сигнала ПШ, несмотря на то, что справа могут находиться ведущие, выставившие запрос. Очередной ведущий не может приступить к управлению шиной до момента ее освобождения. Центральный арбитр не должен формировать ПШ, если шина занята.
Цепочечная схема предполагает статическое распределение приоритетов.
Преимущества: простота реализации, тк требуется всего 3 линии, при этом число устройств не ограниченно.
Недостатки: низкое быстродействие (замедление пропорционально длине цепочки), устройство с самым низким приоритетом может никогда не получить шину.
Децентрализованный (распределенный) арбитраж
Отсутствует единый централизованный арбитр. Каждый ведущий содержит свой блок управления доступом к шине. Эти блоки взаимодействуют друг с другом разделяя ответственность за доступом к шине.
Снижается чувствительность системы к отказам устройств.
Каждый ведущий имеет уникальный уровень приоритета и обладает собственным контроллером шины. Он способен формировать сигналы предоставления шины. Сигналы, поданные на вход одного, поступают на входы остальных ведущих. Логика арбитража реализована в контроллерах каждого ведущего.
Кольцевая схема децентрализованного арбитража
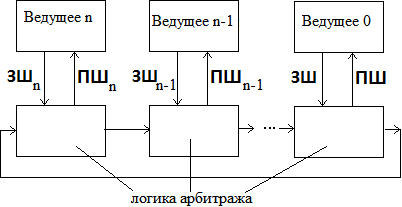
Сигнал запроса может возникнуть в различных точках цепочки, которая замкнута в кольцо.
Текущий ведущий, управляющий шиной, вырабатывает сигнал ПШ. Этот сигнал проходит через все ведущие устройства, не запросившие шину. Если больше нет устройств, которые хотят занять шину, то этот сигнал проходит по кругу.
Ведущий, сформировавший запрос и имеющий на входе активный сигнал ПШ, запрещает прохождение этого сигнала дальше по цепочке. Однако запросивший ведущий не может взять на себя управление шиной до того момента, пока ее не освободит текущий ведущий. Когда текущий ведущий обнаружит потерю сигнала ПШ на входе, он должен освободить и снять сигнал занятия шины. Переход к новому ведущему сопровождается сменой приоритета, которая происходит циклически.
В следующем цикле арбитража текущий ведущий будет иметь самый низкий уровень приоритета, соседний ведущий справа получит наивысший приоритет, а далее приоритет снижается по мере продвижения по кольцу.