

35. Равнодействующая система сил
Равнодействующая система сил
РАВНОДЕЙСТВУЮЩАЯ системы сил - сила, оказывающая на твердое тело такое же механическое действие, как и данная система приложенных к телу сил. В простейших случаях (напр., для сил, приложенных в одной точке или расположенных в одной плоскости) равнодействующую можно найти, последовательно применяя закон параллелограмма сил. Равнодействующую имеет не всякая система сил; напр., пара сил или две силы, не лежащие в одной плоскости, равнодействующей не имеют.
36.Пара сил
ПАРА СИЛ - две равные по величине и противоположные по направлению параллельные силы, приложенные к одному телу. Пара сил не имеет равнодействующей. Кратчайшее расстояние между линиями действия сил, образующих пару сил, называют плечом пары. Действие пары сил на тело характеризуется моментом пары сил - произведением одной из сил на плечо.
37. Аксиома параллелограмма в статике
 Не
меняя cостояния тела, две силы, приложенные
к одной его точке, можно заменить одной
равнодействующей силой, приложенной в
той же точке и равной их геометрической
сумме
Не
меняя cостояния тела, две силы, приложенные
к одной его точке, можно заменить одной
равнодействующей силой, приложенной в
той же точке и равной их геометрической
сумме
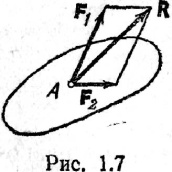
Другими словами, равнодействующую R можно построить как диагональ параллелограмма со сторонами, совпадающими с F1 и F2. Модуль равнодействующей определится равенством R=(F12+F22+2FlF2cosa)1/2, где а—угол между данными векторами F1 и F2. Аксиома применима к любым телам.
Основной закон динамики точки
Основной
закон динамики (второй закон Ньютона)
материальной точки
имеет вид F=, где
где
 –
результирующая сила, действующая на
материальную точку массы
m,
–
результирующая сила, действующая на
материальную точку массы
m,
 = m
= m –
импульс материальной точки.
–
импульс материальной точки.
В
случае m
= const
основной закон динамики принимает вид
= m
37. Аксиома параллелограмма.
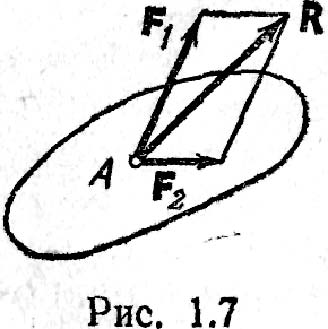
Не меняя cостояния тела, две силы, приложенные к одной его точке, можно заменить одной равнодействующей силой, приложенной в той же точке и равной их геометрической сумме.
(Другими словами, равнодействующую R можно построить как диагональ параллелограмма со сторонами, совпадающими с F1 и F2)
38. Основной закон динамики.
39.
Условия равновесия сходящейся системы сил.
в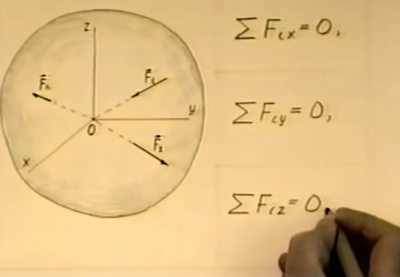 екторная
форма:
екторная
форма:
![]()
Где R-равнодействующая сила
Fk – вектор k силы. K = 1;n
40.Центры тяжести. (xc,yc) – координаты центра тяжести.
Круговой сектор
 смотри дальше!
смотри дальше!
yc = 0 – очевидно.
Интеграл
легче всего выразить,
разбивая область интегрирования на
элементарные секторы с углом dφ.
Такой сектор можно заменить треугольником
с основанием, равным Rdφ и
высотой R.
Площадь такого
треугольника dF=(1/2)R2∙dφ,
а его центр тяжести находится на
расстоянии 2/3R от
вершины, поэтому положим x =
(2/3)R∙cosφ. 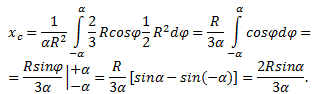
Треугольника

Центр тяжести треугольника лежит в точке пересечения его медиан, которая, как известно, отделяет от каждой медианы третью часть, считая от соответствующей стороны.
![]()
41. Закон сохранения количества движения (закон сохранения импульса).
Из теоремы об изменении количества движения системы можно получить следующие важные следствия:
1) Пусть
сумма всех внешних сил, действующих на
замкнутую систему, равна нулю:
![]()

Тогда
из уравнения ![]() следует,
что Q=
следует,
что Q=![]() =const.
Таким образом, если
сумма всех внешних сил, действующих на
замкнутую систему, равна нулю, то вектор
количества движения (импульса) системы
будет постоянен по модулю и направлению.
=const.
Таким образом, если
сумма всех внешних сил, действующих на
замкнутую систему, равна нулю, то вектор
количества движения (импульса) системы
будет постоянен по модулю и направлению.
2) Пусть
внешние силы, действующие на систему,
таковы, что сумма их проекций на
какую-нибудь ось (например Оx)
равна нулю:
![]()
Тогда
из уравнения ![]() следует, что при этом Qx=const.
Таким образом, если
сумма проекций всех действующих внешних
сил на какую-нибудь ось равна нулю, то
проекция количества движения (импульса)
системы на эту ось есть величина
постоянная.
следует, что при этом Qx=const.
Таким образом, если
сумма проекций всех действующих внешних
сил на какую-нибудь ось равна нулю, то
проекция количества движения (импульса)
системы на эту ось есть величина
постоянная.
Эти результаты и выражают закон сохранения количества движения системы: при любом характере взаимодействия тел, образующих замкнутую систему, вектор полного импульса этой системы все время остается постоянным.