23. Абсолютное ускорение точки
Движение,
совершаемое точкой по отношению к
неподвижной системе отсчета O1x1y1z1,
называется абсолютным или
сложным. Траектория этого
движения называется абсолютной
траекторией, скорость - абсолютной
скоростью (обозначается ![]() )
и ускорение - абсолютным ускорением
(обозначается
)
и ускорение - абсолютным ускорением
(обозначается ![]() ).
Равенство
).
Равенство
![]()
представляет теорему сложения ускорений в случае, когда переносное движение является произвольным: абсолютное ускорение точки равно векторной сумме переносного, относительного и поворотного ускорений. Эту теорему часто называют теоремой Кориолиса.
24. Найти производную по времени от V×ƭ¯ (тау) – единичный вектор касательной к траектории
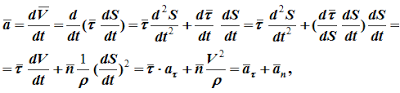
Выражение
для тангенциального ускорения можно
найти, продифференцировав по времени вектор
скорости,
представленный в виде ![]() через
единичный вектор касательной
через
единичный вектор касательной ![]() :
:
![]()
где первое слагаемое — тангенциальное ускорение, а второе — нормальное ускорение.
Здесь
использовано обозначение ![]() для
единичного вектора нормали к траектории
и
для
единичного вектора нормали к траектории
и ![]() -
для текущей длины траектории (
-
для текущей длины траектории (![]() );
в последнем переходе также использовано
очевидное
);
в последнем переходе также использовано
очевидное
![]()
25 . Естественный способ задания движения точки (что включает в себя)
1.1.3 Естественный способ задания движения точки

Рисунок 1.4
На рисунке 1.4:
τ-орт касательной;
n-орт нормали;
b-орт бинормали;
При естественном способе задания движения предполагается определение параметров движения точки в подвижной системе отсчета, начало которой совпадает с движущейся точкой, а осями служат касательная, нормаль и бинормаль к траектории движения точки в каждом ее положении.
Единичные орты τ, n ,b определяют направление соответствующих осей в каждой точке кривой.

Рисунок 1.5
Чтобы задать закон движения точки естественным способом необходимо:
1) знать траекторию движения;
2) установить начало отсчета на этой кривой;
3) установить положительное направление движения;
4) дать закон движения точки по этой кривой, т.е. выразить расстояние от начала отсчета до положения точки на кривой в данный момент времени ∪OM=S(t) .
Зная эти параметры можно найти все кинематические характеристики точки в любой момент времени (рисунок 1.5).
Скорость точки определяется по формулам (1.9)
V=τ⋅dS/dt, V=dS/dt. (1.9)
Первая формула определяет величину и направление вектора скорости, вторая формула только величину.
Ускорение определяется как производная от вектора скорости:
т.е. a=aτ+an. (1.10)
В формуле (1.10)

aτ=τ⋅dV/dt=τ⋅d2S/dt2, aτ=dV/dt=τ⋅d2S/dt2- касательное ускорение; оно характеризует быстроту изменения величины скорости точки;
an=n⋅V2/ρ, an=V2/ρ - нормальное ускорение точки; характеризует быстроту изменения направления вектора скорости;
ρ - радиус кривизны траектории в данной точке (например, для окружности:ρ=R , для прямой линии ρ=∞ ).
Полное ускорение точки определяется следующим образом (рисунок 1.5):
![]()
Выше отмечалось, что всегда можно перейти от одного способа задания закона движения точки к другому. Поэтому, преобразовывая одни и те же формулы, можно получить другое их написание.
Например,

или aτ=acosγ (рисунок 1.5).
Далее