

9. Влияние параметров нелинейного элемента и линейной части на амплитуду и частоту автоколебаний. Рекомендации по стабилизации систем
Найдем kгр ЛЧ при котором исчезает автоколебание:
- АЧХ ЛЧ
|–ZНЭ(А)| будет минимальным при
![]() и равен
и равен
![]()
Приравнивая |ZНЭ(Аmin)| = A(ω0) найдем kГР:
kГР = 0.1447
При k < kГР автоколебания исчезнут что видно на рис.15 (нет пересечения –Zнэ(A) и W(jω)).
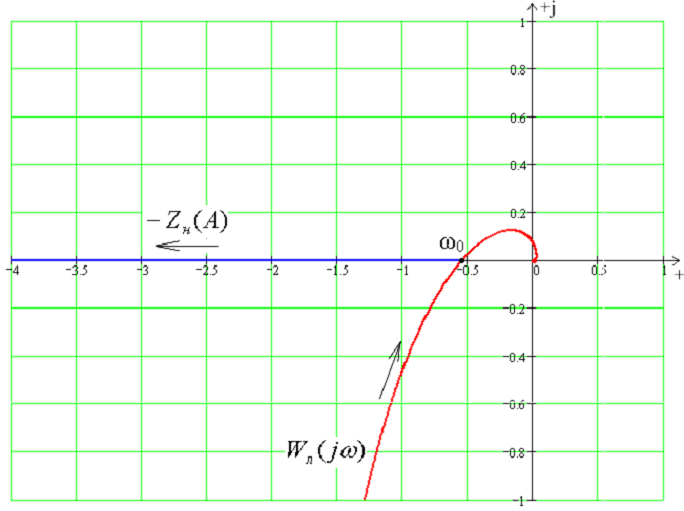
Рис 15. Графики –Zнэ(A) и W(jω) при τ = 4 с и kГР = 0.1447.
Найдем bГР при котором исчезают колебания в системе:
Для этого приравнивая |ZНЭ(Аmin)| = A(ω0) выразим bГР:
![]() .
.
Получим bГР = 248.79. При b < bГР колебания в системе отсутствуют, что видно на рис 16. (нет пересечения –Zнэ(A) и W(jω)).
Найдем cГР при котором исчезают колебания в системе:
Для этого приравнивая |ZНЭ(Аmin)| = A(ω0) выразим cГР:
![]()
Получим cГР = 1.061. При с < cГР колебания в системе отсутствуют (нет пересечения –Zнэ(A) и W(jω)).
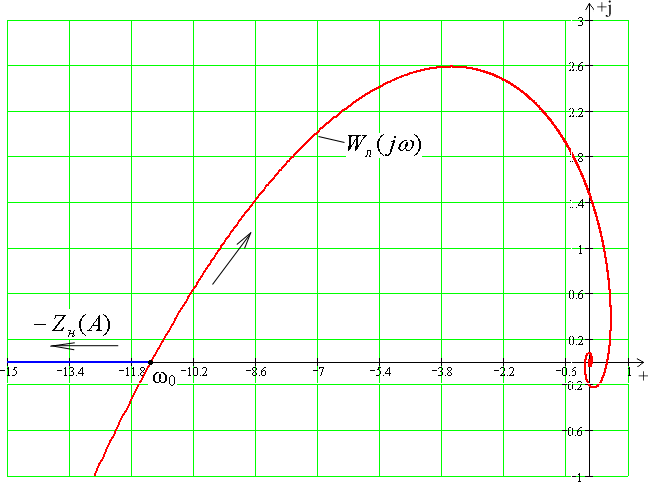
Рис 16. Графики –Zнэ(A) и W(jω) при τ = 4с и bГР = 248.79.
На частоту влияют только параметры ЛЧ. При увеличении T0 частота колебаний уменьшается.
10. Построение диаграммы качества
Для построения диаграммы качества будем рассматривать колебательный переходный процесс в системе как собственные колебания системы при отсутствии внешних воздействий. Если выполнена гармоническая линеаризация нелинейного элемента, то переходный процесс мы будем искать в виде:
![]()
Будем считать переходные колебания близкими к синусоидальным, полагая, однако, что показатели затухания ξ и ω медленно изменяются с изменением амплитуды колебаний a в ходе процесса. Сама амплитуда а(t) может меняться быстро вплоть до затухания за один – два периода. Тогда решение вместо (9) надо искать в виде:
коэффициенты q(a) и b(a) вычисляются аналогично гармонической линеаризации НЭ.
Для построения диаграммы качества используем:
![]()
подставив вместо Q знаменатель передаточной функции ЛЧ, а вместо R его числитель и выделив мнимую и действительную часть получим:

(1)
(2)
Из (1) и (2) выделим K от ξ, ω. В итоге получим:

Подставляя вместо ξ конкретные значения получим график зависимости A(K). При ω= ωп:
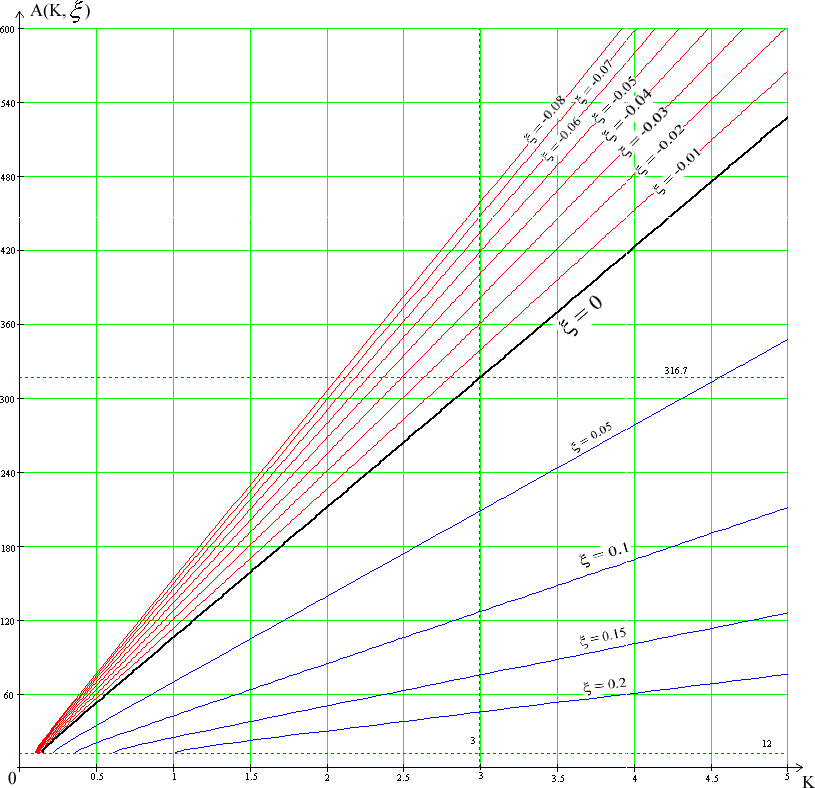
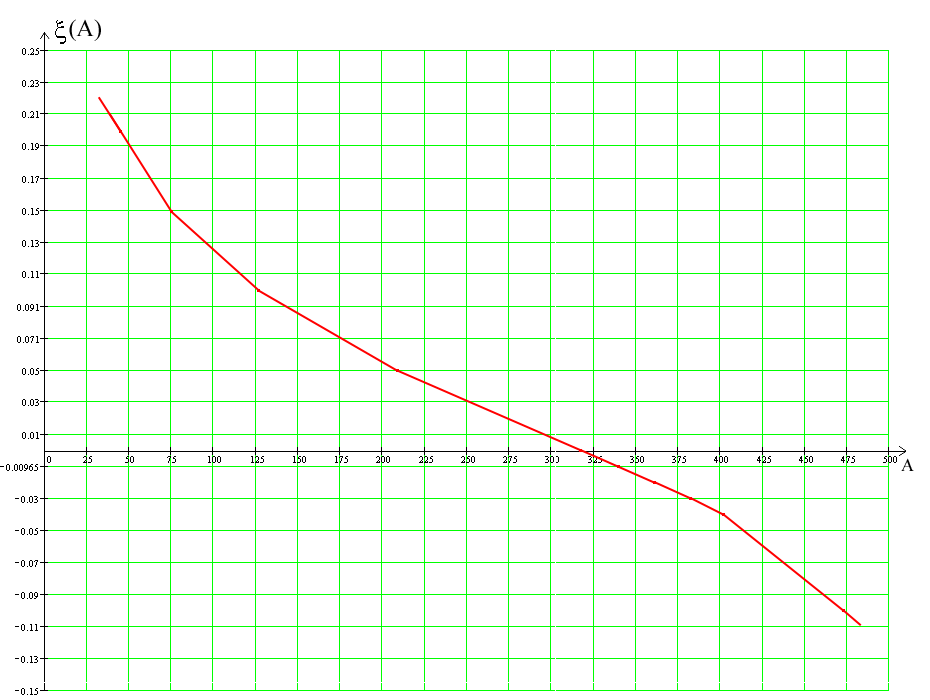
По диаграмме качества построим график зависимости ξ(а) при постоянном значении kлч=3:
11. Заключение.
Была исследована нелинейная система автоматического регулирования температуры. Выведено дифференциальное уравнение, построены фазовые портреты системы при наличии и отсутствии запаздывания. Расчет периодического режима был проведен двумя методами: методом фазовой плоскости (точный метод) и частотным методом (приближенный метод). Определены наличие и параметры автоколебаний, т.е. амплитуда и частота периодического режима, в обоих методах. Приведены оценки влияния параметров нелинейного элемента и линейной части на параметры периодического режима.
При заданных параметрах САР температуры печи устойчива, имеет автоколебания с параметрами:
Точный метод:
AП = 311.77
ωП = 0,167 с-1
Приближенный метод:
ω0 = 0.148 с-1
АП = 316.69