

Расчет переходного процесса :
Исходя из начальных условий, определяют
постоянные интегрирования на каждом
участке, находят время движения по
каждому участку, вычисляют значения
![]() и
и
![]() .
.
1), , без учета запаздывания
Первый участок первого круга.
а). Дифференциальное уравнение для первого участка имеет вид
. (1)
Пусть
![]() .
(2)
.
(2)
Тогда уравнение (1) примет вид
![]() .
(
.
(![]() )
)
Решением уравнения ( ) будет
![]() .
(3)
.
(3)
Следовательно, решение уравнения (2) примет вид
![]() (4)
(4)
(3) и (4) – решения уравнения динамики для первого участка.
б). Определяем постоянные интегрирования c1 и с2. для первого участка, т.е.
![]() ,
,
![]() при t = t
1= 0 с
. Из (3) при t=0 имеем:
при t = t
1= 0 с
. Из (3) при t=0 имеем:
![]() ,
(5)
,
(5)
![]() .
.
Из уравнения (4) получаем:
![]() ,
(6)
,
(6)
![]() .
.
в). Находим время движения по первому участку - t1.
В конце первого участка
![]() .
.
Из уравнения (4) имеем:
![]() ,
(7)
,
(7)
Решая последнее уравнение, находим t1.
Все вычисления в основном производим
с помощью математического пакета
«Mathcad». Из него видно, что
![]() имеет два решения. Учитывая то, что время
должно иметь положительное вещественное
значение, получаем t1=5,377
с.
имеет два решения. Учитывая то, что время
должно иметь положительное вещественное
значение, получаем t1=5,377
с.
г). Определим координаты
![]() и
и
![]() в конце первого участка. Первая координата
известна и имеет значение
в конце первого участка. Первая координата
известна и имеет значение
![]() ,
вторую находим из (3), при t
= t1 =
5,377 с:
,
вторую находим из (3), при t
= t1 =
5,377 с:
![]() , (8)
, (8)
![]() .
.
Второй участок первого круга.
а). Дифференциальное уравнение для второго участка имеет вид
![]() .
(9)
.
(9)
Введем обозначение (2) и получаем систему дифференциальных уравнений:
![]() (10)
(10)
Решение второго дифференциального уравнения системы (11) имеет вид
![]() (11)
(11)
![]() (12)
(12)
где
![]() и
и
![]() - действительная и мнимая часть комплексных
корней решения характеристического
уравнения.
- действительная и мнимая часть комплексных
корней решения характеристического
уравнения.
![]()
![]()
б). Определим постоянные интегрирования с3 и с4 из начальных условий для второго участка. Координаты в начале второго участка равны координатам в конце первого участка, т.е.
![]() ,
,
![]() при t = t
2= 0с.
при t = t
2= 0с.
Из уравнения (11): ![]()
Из уравнения (12): ![]()
в). Находим время движения по второму участку t2.
В конце второго участка
![]() .
Из уравнения (11) находим t2:
.
Из уравнения (11) находим t2:
![]() (13)
(13)
![]() с - время движения по второму участку
с - время движения по второму участку
г). Определим координаты и в конце второго участка.
Первая координата известна и имеет
значение
![]() ,
вторую находим из (12) при t=t2=1,277с:
,
вторую находим из (12) при t=t2=1,277с:
![]() ,
(14)
,
(14)
![]() .
.
Третий участок первого круга
а). Дифференциальное уравнение для третьего участка имеет вид
![]() .
(15)
.
(15)
Применив (2) уравнение (15) перепишем
![]() .
.
![]()
Решением уравнения будет
![]() . (16)
. (16)
Следовательно, решение уравнения (2) в этом случае примет вид
![]() . (17)
. (17)
(16) и (17) – решения уравнения динамики для третьего участка.
б). Определяем постоянные интегрирования
c5 и с6.
из начальных условий для третьего
участка. Координаты в начале третьего
участка равны координатам в конце
второго участка, т.е.
![]() ,
,
![]() при t = t3
= 0 с. Из уравнения (16)
имеем:
при t = t3
= 0 с. Из уравнения (16)
имеем:
![]() ,
(18)
,
(18)
![]() .
.
Из уравнения (17) получаем
![]() ,
(19)
,
(19)
![]() .
.
в). Находим время движения по третьему участку t3.
В конце третьего участка
![]() .
.
Из уравнения (17) имеем:
![]() ,
(20)
,
(20)
Решая последнее уравнение, находим t3 =4,534с.
г). Определим координаты и в конце третьего участка.
Первая координата известна и имеет
значение
![]() ,
вторую координату находим из (16 при
t3=4,534с:
,
вторую координату находим из (16 при
t3=4,534с:
![]() , (21)
, (21)
![]() .
.
Далее, для каждого участка (в порядке очередности) таким же образом находим: постоянные интегрирования, время движения по участку, координаты и в конце участка.
Четвертый участок первого круга.
Время движения по второму участку t2.
![]()
Координаты и в конце второго участка при .
![]()
![]()
Первый участок второго круга
Время движения по первому участку t1.
![]()
Координаты и в конце первого участка при .
![]()
![]()
Второй участок второго круга.
Время движения по второму участку t2.
![]()
Координаты и в конце второго участка при .
![]()
![]()
Третий участок второго круга
Время движения по третьему участку t3.
![]()
Координаты и в конце третьего участка при .
![]()
![]()
Четвертый участок второго круга.
Время движения по второму участку t2.
![]()
Координаты и в конце второго участка при
![]()
![]()
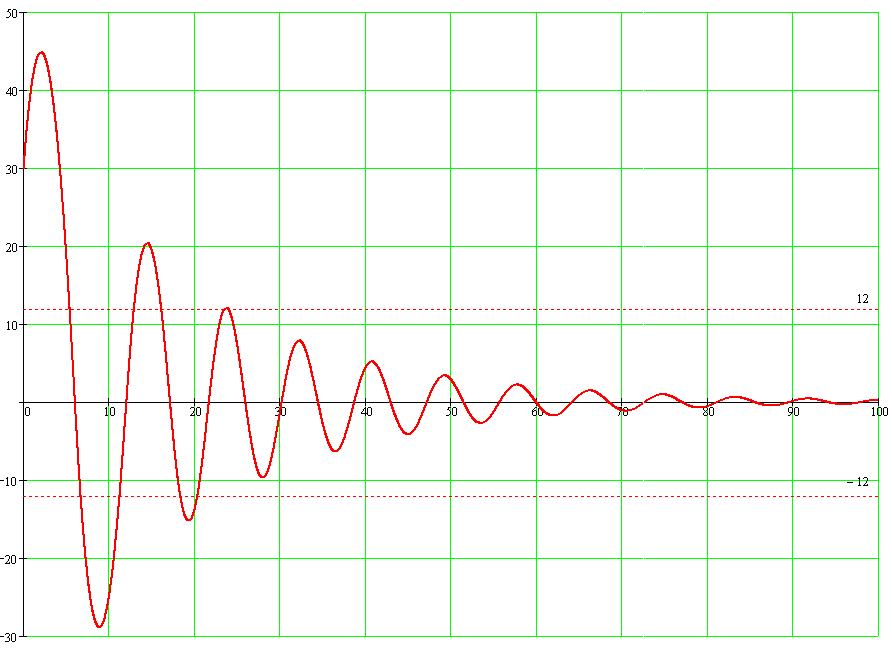
Рис 8. График переходного процесса без учета запаздывания.
2)
![]() ,
,
![]() с учетом запаздывания
с учетом запаздывания
Первый участок первого круга.
а). Дифференциальное уравнение для первого участка имеет вид
. (1)
Пусть . (2)
Тогда уравнение (1) примет вид
. ( )
Решением уравнения ( ) будет
. (3)
Следовательно, решение уравнения (2) примет вид
(4)
(3) и (4) – решения уравнения динамики для первого участка.
б). Определяем постоянные интегрирования c1 и с2. для первого участка, т.е.
![]() ,
,
![]() при t = t1
= 0с . Из (3) при t=0
имеем:
при t = t1
= 0с . Из (3) при t=0
имеем:
, (5)
![]() .
.
Из уравнения (4)получаем
, (6)
![]() .
.
в). Находим время движения по первому участку t1.
В конце первого участка
![]() .
.
Из уравнения (4) имеем:
, (7)
Решая последнее уравнение, находим t1. Все вычисления в основном производим с помощью математического пакета «Mathcad 2000». Получаем t1=4,68с.
Учитывая запаздывание, получим t1=8,68с
г). Определим координаты и в конце первого участка. Находим из (3) и (4), при t=t1=8,68с:
![]() , (8)
, (8)
![]() .
.
Второй участок первого круга.
а). Дифференциальное уравнение для второго участка имеет вид
. (9)
Введем обозначение (2) и получаем систему дифференциальных уравнений:
(10)
Решение второго дифференциального уравнения системы (10) имеет вид
(11)
![]() (12)
(12)
где и - действительная и мнимая часть комплексных корней решения характеристического уравнения.
![]()
![]()
б). Определим постоянные интегрирования
с3 и с4
из начальных условий для второго участка.
Координаты в начале второго участка
равны координатам в конце первого
участка, т.е.
![]() ,
,
![]() при t=t2=0с.
при t=t2=0с.
Из уравнения (13): ![]() (13)
(13)
Из уравнения (12): ![]() (14)
(14)
в). Находим время до конца второго участка - t2.
В конце второго участка . Из уравнения (12) находим t2:
![]() (15)
(15)
![]() с
с
Учитывая запаздывание, получим t2=8,8с
г). Определим координаты и в конце второго участка.
Находим из (11) и (12) при t=t2=8,8с:
![]()
![]() .
.
Третий участок первого круга
а). Дифференциальное уравнение для третьего участка имеет вид
. (17)
Применив (2) уравнение (17) перепишем
.
![]()
Решением уравнения будет
![]() . (18)
. (18)
Следовательно, решение уравнения (2) в этом случае примет вид
![]() . (19)
. (19)
(18) и (19) – решения уравнения динамики для третьего участка.
б). Определяем постоянные интегрирования
c5 и с6.
из начальных условий для третьего
участка. Координаты в начале третьего
участка равны координатам в конце
второго участка, т.е.
![]() ,
,
![]() при t=t3=0
с. Из уравнения (18) имеем:
при t=t3=0
с. Из уравнения (18) имеем:
, (20)
![]() .
.
Из уравнения (19) получаем
, (21)
![]() .
.
в). Находим время до конца третьего участка - t3.
В конце третьего участка .
Из уравнения (19) имеем:
![]() , (22)
, (22)
Решая последнее уравнение, находим t =22,03с. Учитывая запаздывание, получим t3=26,03с
г). Определим координаты и в конце третьего участка.
Находим из (18) и (19) при t3 =26,03с:
![]()
![]() .
.
Далее, для каждого участка (в порядке очередности) таким же образом находим: постоянные интегрирования, время движения по участку, координаты и в конце участка.
Четвертый участок первого круга.
Время движения до конца второго участка с учетом запаздывания - t2.
![]()
Координаты и в конце второго участка при .
![]()
![]()
Первый участок второго круга
Время движения до конца первого участка с учетом запаздывания - t1.
![]()
Координаты и в конце первого участка при .
![]()
![]()
Второй участок второго круга.
Время движения до конца второго участка с учетом запаздывания - t2.
![]()
Координаты и в конце второго участка при .
![]()
![]()
Третий участок второго круга
Время движения до конца третьего участка с учетом запаздывания - t3.
![]()
Координаты и в конце третьего участка при .
![]()
![]()
Четвертый участок второго круга.
Время движения до конца второго участка с учетом запаздывания - t2.
![]()
Координаты и в конце второго участка при
![]()
![]()
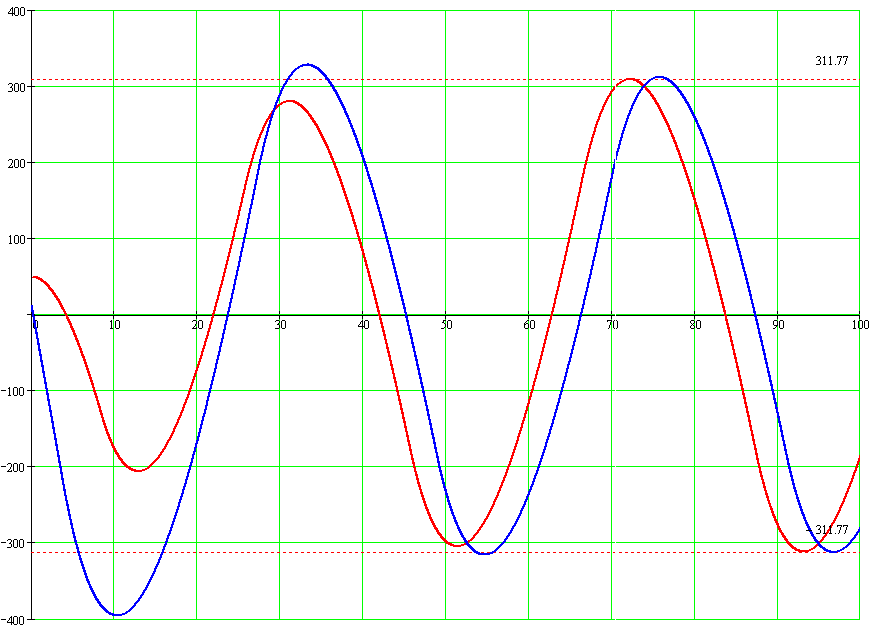
Рис 9. График переходного процесса с учетом запаздывания.