

4.4 Моделирование суэп
Блок-схема модели 2-координатного ЭП 2-звенного манипулятора на базе ЭПБ-2 показана на рис.4.2.
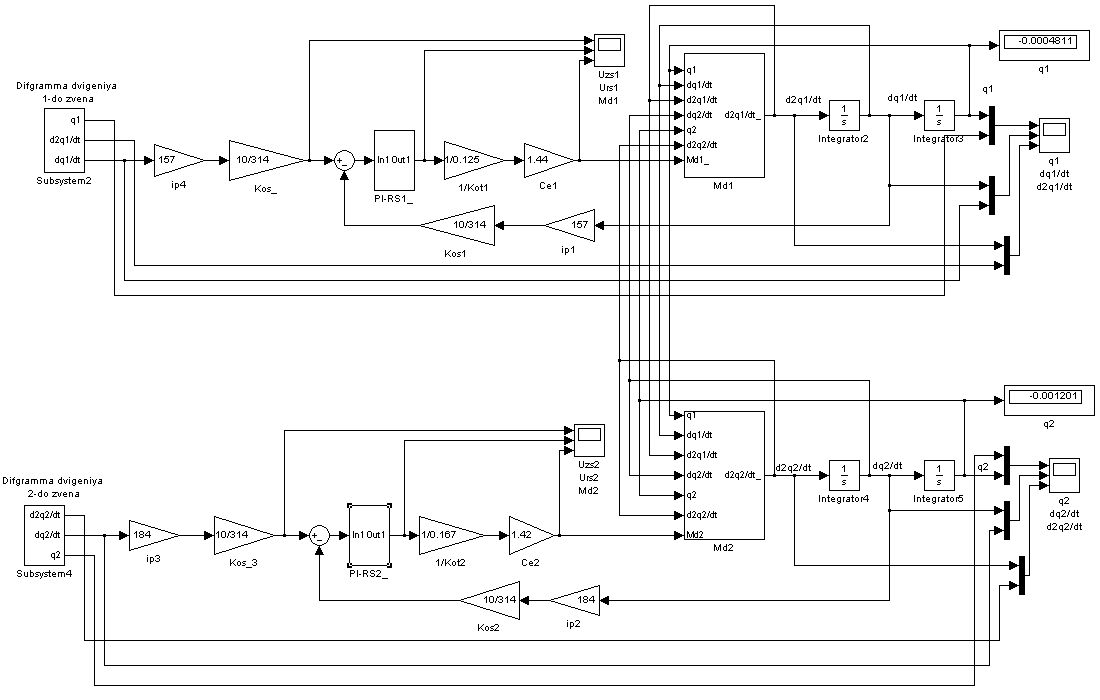
Рис. 4.2. Блок-схема модели 2-координатного ЭП 2-звенного манипулятора на базе ЭПБ-2
На рис.4.3 и рис.4.4 показаны диаграммы движения 1-го и 2-го звеньев манипулятора. Там же показаны заданные диаграммы движения 1-го и 2-го звеньев. Так на рис.4.3,а и рис.4.4,а показаны заданная и полученная с помощью СУЭП ЭПБ2 диаграммы перемещения соответственно 1-го и 2-го звеньев манипулятора. Видно, что они настолько совпадают, что их трудно различить.
Так на рис.4.3,б и рис.4.4,б показаны заданная и полученная с помощью СУЭП ЭПБ2 диаграммы скорости перемещения соответственно 1-го и 2-го звеньев манипулятора. Они также достаточно полно совпадают, но различия между ними более заметны.

Рис.4.3. Диаграммы движения 1-го звена
Так на рис.4.3,в и рис.4.4,в показаны заданная и полученная с помощью СУЭП ЭПБ2 диаграммы ускорения с которым перемещаются соответственно 1-е и 2-е звеньев манипулятора. Здесь заметны различия между заданной и полученной с помощью СУЭП ЭПБ2 диаграммами ускорения. Часть из этих отличий обусловлена наличием динамической ошибки, присущей системе регулирования скорости, а часть наличием динамической ошибки, обусловленной взаимным влиянием звеньев манипулятора друг на друга при их движении.

Рис.4.4. Диаграммы движения 2-го звена
На рис. 4.5 и на рис. 4.6 показаны диаграммы сигналов задания скорости (а), задания тока (б) и диаграмма момента (в) в СУЭП соответственно 1-го и 2-го звена манипулятора. Из графиков (в) видно, что наличие взаимного влияния звеньев манипулятора друг на друга при их движении приводит к увеличению максимальных значений моментов, развиваемых двигателем. Так максимальный момент, развиваемый двигателем Д1 увеличивается от 51 НМ до 55 Нм. Максимальный момент, развиваемый двигателем Д2 увеличивается от 65,4 НМ до 72 Нм.

Рис. 4.5. Диаграммы сигналов задания скорости (а), задания тока (б), диаграмма момента 1-го звена (в)
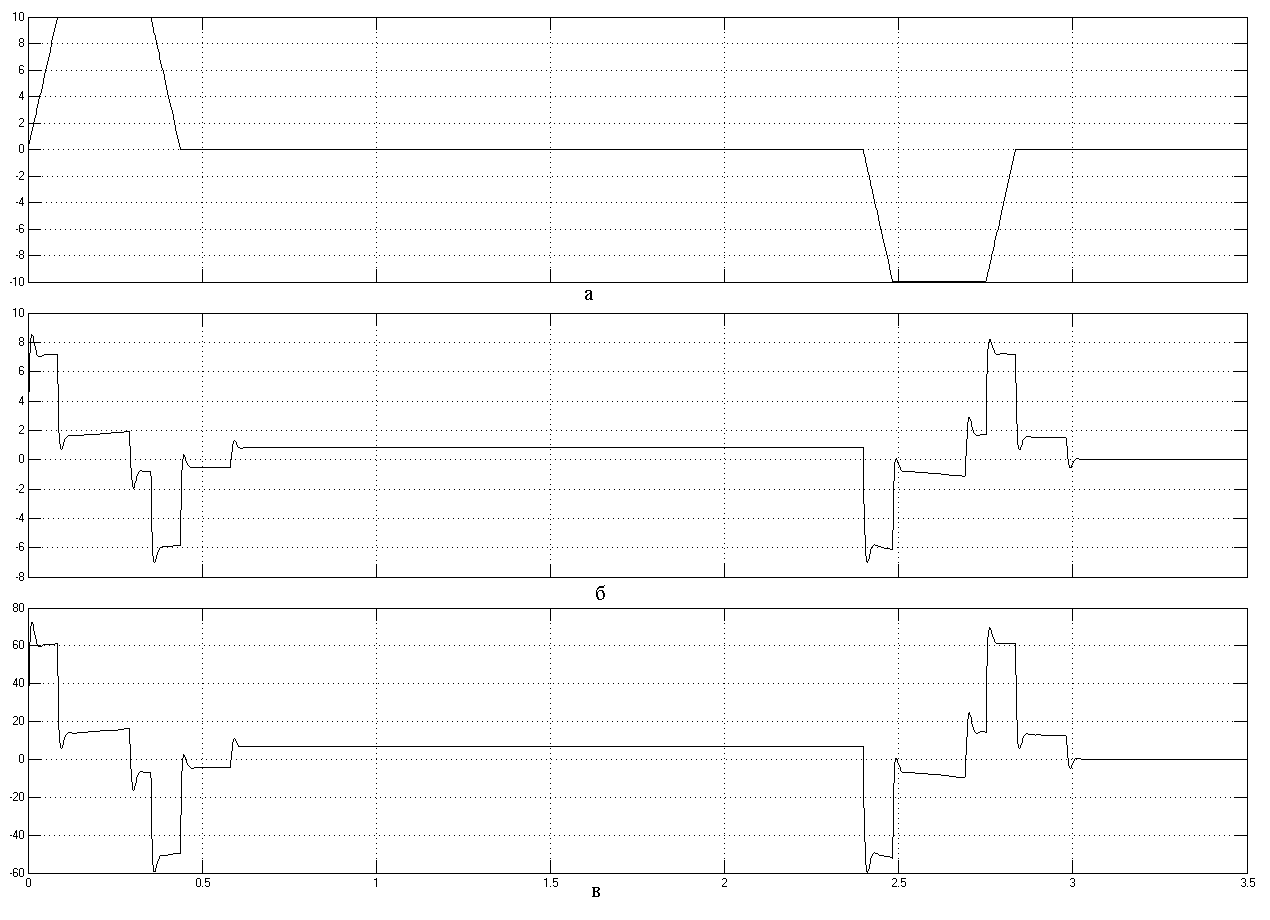
Рис.4.6. Диаграммы сигналов задания скорости (а), задания тока (б), диаграмма момента 2-го звена
Выводы
5. Экономика
6. Охрана труда
Заключение
В
дипломном
проекте
произведен анализ кинематики манипулятора
и построена рабочая зона манипулятора.
При исследовании влияния изменения
массы перемещаемого груза ( )
было установлено, что максимальное
значение момента инерции манипулятора
относительно оси поворота 1-го звена О1
при вытянутой руке манипулятора (q2=0)
изменяется относительно среднего
значения в пределах ±6%. Минимальное
значение момента инерции манипулятора
относительно оси поворота 1-го звена О1
при сложенной руке манипулятора (q2=180о)
изменяется относительно среднего
значения в пределах ±1,15%. Откуда видно,
что изменение массы груза в 2 раза
незначительно влияет на момент инерции
манипулятора относительно оси поворота
1-го звена О1 изменяется.
)
было установлено, что максимальное
значение момента инерции манипулятора
относительно оси поворота 1-го звена О1
при вытянутой руке манипулятора (q2=0)
изменяется относительно среднего
значения в пределах ±6%. Минимальное
значение момента инерции манипулятора
относительно оси поворота 1-го звена О1
при сложенной руке манипулятора (q2=180о)
изменяется относительно среднего
значения в пределах ±1,15%. Откуда видно,
что изменение массы груза в 2 раза
незначительно влияет на момент инерции
манипулятора относительно оси поворота
1-го звена О1 изменяется.
Аналогично значение момента инерции манипулятора относительно оси поворота 2-го звена О2 изменяется относительно среднего значения в пределах ±9%. Откуда видно, что изменение массы груза в 2 раза незначительно влияет на момент инерции манипулятора относительно оси поворота 2-го звена О2 изменяется.
Были рассчитаны и построены диаграммы движения звеньев манипулятора. С помощью уравнений Лагранжа второго рода была разработана динамическая модель 2-звенного манипулятора, с помощью которой были определены требуемые параметры двигателей. Были выбраны двигатели серии 2ДВУ и электропривод ЭПБ2. Бал проведен синтез параметров систем регулирования скорости и разработана модель 2-координатного электропривода. Проверка на модели 2-координатной СУЭП подтвердила высокую точность воспроизведения требуемых диаграмм движения.
Список литературы
Методические указания к расчетно-графической работе по курсу «Электропривод роботов» ( Сост. О. А. Андрюшенко, В. А. Водичев; Одесса: ДПУ, 1993-38с.)
Маслоненко В. В. Автоматизированный электропривод: Учебники для вузов – М. : Энергоатомиздат, 1986 – 461с.
Попов В. М. Теоретическая механика. Краткий курс: Учебник для вузов –М.: Наука, 1986 -336с.
Попов Е. П. Письменный Г. В. Основы робототехники: Введение в специальность: Учебники для вузов по спец.: «Робототехнические системы и комплексы» - М.: Высш. Шк. , 1990 – 224с.
Терехов В. М. Элементы автоматизированного электропривода: Учебник для вузов – М.: Энергоатомиздат, 1987 – 224с.
Чевнавский С. А. Проектирование механических систем. Учеб.-справ. Пособие по курсовому проектированию механических передач для вузов – М. , 1984.